一种摄像机联动追踪事件的方法、装置、设备及存储介质与流程
本发明涉及数据处理,特别涉及一种摄像机联动追踪事件的方法、装置、设备及存储介质。
背景技术:
1、随着ipcamera(网络摄像机)的普及,单个摄像机已经不满足大场景的监控及事件追踪。用户通常需要在不同的位置布置多个摄像机,当摄像机产生事件报警时,快速定位告警摄像机并打开预览画面,以及完整记录事件的轨迹成为一种常态化的需求。当前利用多个摄像机进行追踪时,每个摄像机单独工作,监控角度有限,使得摄像机监控的不够全面。
2、因此,如何提高摄像机监控的全面性,减少盲区的出现是本领域技术人员急需解决的技术问题。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种摄像机联动追踪事件的方法、装置、设备及存储介质,解决了现有技术中无法全面高效地追踪事件的技术问题。
2、为解决上述技术问题,本发明提供了一种摄像机联动追踪事件的方法,包括:
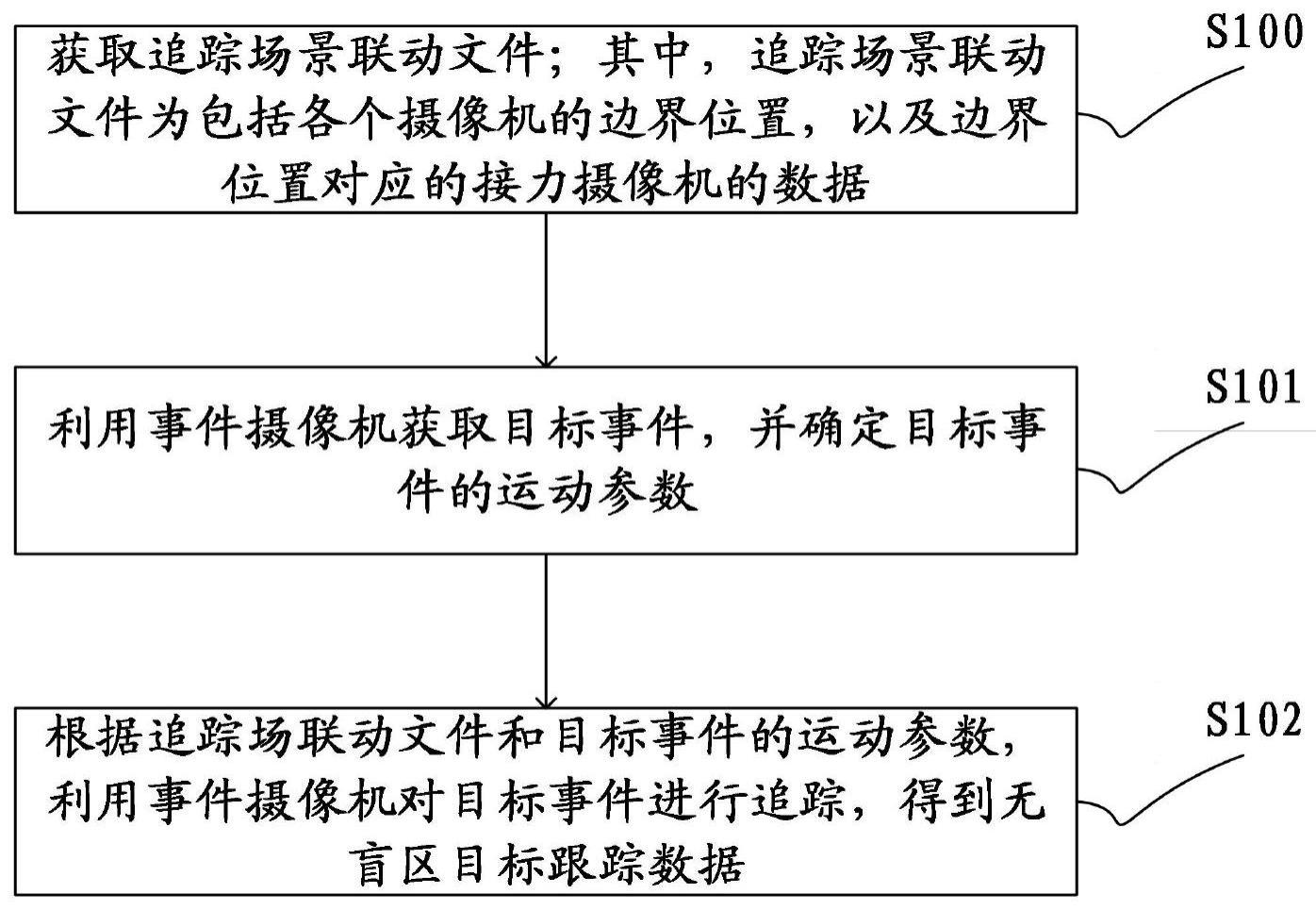
3、获取追踪场景联动文件;其中,所述追踪场景联动文件为包括各个摄像机的边界位置,以及所述边界位置对应的接力摄像机的数据;
4、利用事件摄像机获取目标事件,并确定所述目标事件的运动参数;
5、根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据。
6、可选的,在所述获取追踪场景联动文件之前,还包括:
7、获取各个摄像机采集的目标图像;
8、根据所述目标图像确定每个图像对应的边界重合信息;
9、根据所述边界重合信息确定每个摄像机对应的左接力摄像机和右接力摄像机,得到所述追踪场景联动文件。
10、可选的,所述利用事件摄像机获取目标事件,并确定所述目标事件的运动参数,包括:
11、利用所述事件摄像机获取所述目标事件,并确定所述目标事件的运动速度和运动方向。
12、可选的,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
13、利用第一摄像机持续跟踪监控到的所述目标事件;
14、当确定所述目标事件的轨迹到达所述第一摄像机的边界时,根据所述追踪场景联动文件确定第二摄像机继续监控所述目标事件。
15、可选的,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
16、根据所述追踪场景联动文件和所述目标事件的运动参数,利用多个所述事件摄像机不断对所述目标事件进行追踪,在追踪过程中确保每个摄像机追踪事件的尾部边界事件和下一个摄像机监控的边界重合,消除盲区。
17、可选的,在所述利用事件摄像机获取目标事件,并确定所述目标事件的运动参数之前,还包括:
18、对所述事件摄像机进行授权,将所述事件摄像机加入当前监控场景。
19、可选的,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
20、利用主控摄像机控制根据所述追踪场景联动文件所述事件摄像机对所述目标事件进行追踪,得到所述无盲区目标跟踪数据;
21、并对所述无盲区目标跟踪数据进行预览和/或存储。
22、本发明还提供了一种摄像机联动追踪事件的装置,包括:
23、追踪场景联动文件获取模块,用于获取追踪场景联动文件;其中,所述追踪场景联动文件为包括各个摄像机的边界位置,以及所述边界位置对应的接力摄像机的数据;
24、运动参数确定模块,用于利用事件摄像机获取目标事件,并确定所述目标事件的运动参数;
25、联动追踪模块,用于根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据。
26、本发明还提供了一种摄像机联动追踪事件的设备,包括:
27、存储器,用于存储计算机程序;
28、处理器,用于执行所述计算机程序时实现上述的摄像机联动追踪事件的方法的步骤。
29、本发明还提供了一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的摄像机联动追踪事件的方法的步骤。
30、可见,本发明通过获取追踪场景联动文件;其中,追踪场景联动文件为包括各个摄像机的边界位置,以及边界位置对应的接力摄像机的数据;利用事件摄像机获取目标事件,并确定目标事件的运动参数;根据追踪场景联动文件和目标事件的运动参数,利用事件摄像机对目标事件进行追踪,得到无盲区目标跟踪数据。和当前技术方案无法全面追踪事件相比,本发明可以根据追踪场景联动文件使得摄像机可以对事件进行接力追踪,得到无盲区目标跟踪数据。
31、此外,本发明还提供了一种摄像机联动追踪事件的装置、设备及存储介质,同样具有上述有益效果。
技术特征:
1.一种摄像机联动追踪事件的方法,其特征在于,包括:
2.根据权利要求1所述的摄像机联动追踪事件的方法,其特征在于,在所述获取追踪场景联动文件之前,还包括:
3.根据权利要求1所述的摄像机联动追踪事件的方法,其特征在于,所述利用事件摄像机获取目标事件,并确定所述目标事件的运动参数,包括:
4.根据权利要求1所述的摄像机联动追踪事件的方法,其特征在于,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
5.根据权利要求1至4任一项所述的摄像机联动追踪事件的方法,其特征在于,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
6.根据权利要求1所述的摄像机联动追踪事件的方法,其特征在于,在所述利用事件摄像机获取目标事件,并确定所述目标事件的运动参数之前,还包括:
7.根据权利要求1所述的摄像机联动追踪事件的方法,其特征在于,所述根据所述追踪场景联动文件和所述目标事件的运动参数,利用所述事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据,包括:
8.一种摄像机联动追踪事件的装置,其特征在于,包括:
9.一种摄像机联动追踪事件的设备,其特征在于,包括:
10.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的摄像机联动追踪事件的方法的步骤。
技术总结
本发明公开了一种摄像机联动追踪事件的方法、装置、设备及存储介质,应用于数据处理技术领域,可以包括:获取追踪场景联动文件;追踪场景联动文件为包括各个摄像机的边界位置,以及边界位置对应的接力摄像机的数据;利用事件摄像机获取目标事件,并确定目标事件的运动参数;根据追踪场景联动文件和目标事件的运动参数,利用事件摄像机对所述目标事件进行追踪,得到无盲区目标跟踪数据。可见,本发明和当前各个摄像机单独工作相比,本发明可以根据追踪场景联动文件确保各个摄像机在监控过程中,接力监控,联动跟踪事件,得到无盲区目标跟踪数据,故本发明可以提高事件记录的完整性和效率,且查看监控记录时,无需查找多个视频分段,提高用户体验。
技术研发人员:陈杰,蔡乾盟,方彪,金伟,应红力
受保护的技术使用者:杭州觅睿科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!