一种无人机信号检测方法及检测系统与流程
本发明涉及信号检测,尤其涉及一种无人机信号检测方法及检测系统。
背景技术:
1、无人机设备在批量制造前,需要生产多款测试样机和控制器,并对其进行无人机信号检测;其中,无线电信号检测是指对无人机的遥控信号和无线图传信号进行测试,评估其稳定性和传输距离;因此,在进行无线电信号检测时,我们需要模拟无人机在不同场景下的环境特征,从而采集到对应的信号检测数据。
2、无人机通常会处在空中环境和贴地环境;其中,空中环境是最为常见的工作环境,如无人机正常飞行时便处于空中环境;贴地环境则是飞行前最为常见的待机环境,如无人机放置于空地未起飞时和无人机降落/坠落于空地时均是处于贴地环境。
3、在进行空中环境下的无线电信号检测时,现有的无人机信号检测方式通常是人员操控无人机按照既定路线飞行,并在此过程中通过信号检测装置采集无人机和控制器之间的信号情况;但是,在进行贴地环境的的无线电信号检测时,由于无法安全操作无人机进行贴地位置调整;因此,现有技术往往是工作人员根据测试需求手动调整无人机和控制器之间的相对距离、相对姿态等环境参数,并在固定好环境参数后通过信号检测装置采集无人机和控制器之间的信号情况,再调整下一环境参数直至完成所有待测环境参数的设置。
4、综上,在进行贴地环境的无线电信号检测时,现有技术依赖于人工调整环境参数,造成测试事件长、测试步骤繁琐、参数设置不标准等问题;因此,有必要提供一种无人机信号检测方法及检测系统来解决上述技术问题。
技术实现思路
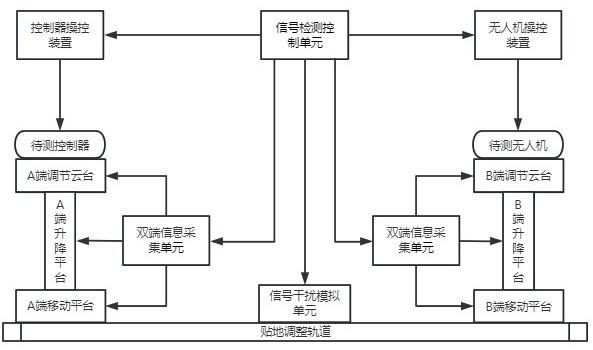
1、为解决上述之一技术问题,本发明提供的一种无人机信号检测系统,包括a端姿态调节单元、b端姿态调节单元、控制器操控装置、无人机操控装置、贴地调整轨道、信号干扰模拟单元、双端信息采集单元和信号检测控制单元;
2、所述a端姿态调节单元包括a端移动平台、a端升降平台和a端调节云台;其中,所述a端移动平台上安装a端升降平台,所述a端升降平台上安装a端调节云台,所述a端调节云台上固定放置待测控制器;
3、所述b端姿态调节单元包括b端移动平台、b端升降平台和b端调节云台;其中,所述b端移动平台上安装b端升降平台,所述b端升降平台上安装b端调节云台,所述b端调节云台上固定放置待测无人机;
4、所述贴地调整轨道为直线轨道,所述控制器操控装置与待测控制器和信号检测控制单元电性连接,并用于对待测控制器和信号检测控制单元进行通信信号上传和控制信号下放;所述无人机操控装置与待测无人机和信号检测控制单元电性连接,并用于对待测无人机和信号检测控制单元进行通信信号上传和控制信号下放;
5、所述a端移动平台和b端移动平台分别设置在贴地调整轨道的a、b两端;所述信号干扰模拟单元设置在a、b两端之间并与信号检测控制单元电性连接;所述双端信息采集单元分别与a端姿态调节单元和b端姿态调节单元,采集a、b两端的移动数据、升降数据和姿态数据,并实时上传至信号检测控制单元。
6、一种无人机信号检测方法,运用在如上所述的一种无人机信号检测系统中,所述信号检测控制单元通过如下步骤进行信号检测:
7、步骤1:创建信号检测事件集合,包括若干信号检测事件;其中,信号检测事件由测试环境参数集合和测试信号参数集合组成;
8、步骤2:按照fifo规则获取信号检测事件,并将测试环境参数集合注入至a端姿态调节单元和b端姿态调节单元中;测试信号参数集合注入至信号干扰模拟单元、待测控制器和待测无人机中;
9、步骤3:通过无人机操控装置和控制器操控装置,采集执行当前信号检测事件时,待测无人机和待测控制器的通信信号,并进行通信评分得到当前信号状态;
10、步骤4:将当前信号状态和信号检测事件打包为测试数据包,并返回步骤1执行下一信号检测事件,直至信号检测事件集合执行完成,得到测试数据包集合;
11、步骤5:通过测试数据包集合分析待测无人机和待测控制器在贴地场景下,不同环境参数进而不同测试信号对应的信号状态,并判断当前待测无人机和待测控制器是否满足贴地场景下的通信需求。
12、作为更进一步的解决方案,所述测试环境参数集合由相对姿态参数、相对距离参数、相对高度参数和相对夹角参数组成;其中,
13、所述相对姿态参数由控制器姿态参数和无人机姿态参数组成;所述控制器姿态参数用于设置a端调节云台的俯仰角和航向角;所述无人机姿态参数用于设置b端调节云台的俯仰角和航向角;
14、所述相对距离参数由控制器位置参数和无人机位置参数组成;所述控制器位置参数用于设置a端移动平台在贴地调整轨道所处位置;所述无人机位置参数用于设置b端移动平台在贴地调整轨道所处位置;
15、所述相对高度参数由控制器贴地高度参数和无人机贴地高度参数和组成;所述控制器贴地高度参数用于调节a端升降平台与地面之间的高度差,所述无人机贴地高度参数用于调节b端升降平台与地面之间的高度差;
16、所述相对夹角参数为二阶参数,通过相对姿态参数、相对距离参数和相对高度参数计算得到;包括信号收发相对夹角和ab双端相对夹角组成;其中,所述信号收发相对夹角用于描述待测无人机接收端和待测控制器发射端之间的夹角值;所述ab双端相对夹角用于描述待测无人机和待测控制器所处位置之间的夹角值。
17、作为更进一步的解决方案,所述测试信号参数集合由图传信号参数、控制信号参数、信号干扰参数和运行状态参数;
18、其中,所述图传信号参数用于描述待测无人机采集到的标准图传信号,所述控制信号参数用于描述待测控制器发射的标准控制信号;所述信号干扰参数用于设置信号干扰模拟单元的信号干扰强度和信号干扰特征;所述运行状态参数用于描述无人机的电机的运行状态。
19、与相关技术相比较,本发明提供的一种基于工件轮廓表面尺寸识别的粉末管理方法具有如下有益效果:
20、本发明通过设置无人机信号检测系统来实现对贴地场景的模拟,并且各个场景参数调节均为自动化调节,无需人工进行设置,避免在繁多的测试环境部署中人工操作带来的参数误差,且避免消耗人力成本并能实现快速调节部署;通过测试流程实现了过程全自动化部署,操作人员只需要按照标准化流程设置创建信号检测事件集合,其余步骤均能自动化实施,从而降低检测成本增加检测准确度。
技术特征:
1.一种无人机信号检测系统,其特征在于,包括a端姿态调节单元、b端姿态调节单元、控制器操控装置、无人机操控装置、贴地调整轨道、信号干扰模拟单元、双端信息采集单元和信号检测控制单元;
2.一种无人机信号检测方法,运用在如权利要求1所述的一种无人机信号检测系统中,其特征在于,所述信号检测控制单元通过如下步骤进行信号检测:
3.根据权利要求2所述的一种无人机信号检测方法,其特征在于,所述测试环境参数集合由相对姿态参数、相对距离参数、相对高度参数和相对夹角参数组成;其中,
4.根据权利要求2所述的一种无人机信号检测方法,其特征在于,所述测试信号参数集合由图传信号参数、控制信号参数、信号干扰参数和运行状态参数;
技术总结
本发明提供了一种无人机信号检测方法及检测系统,涉及信号检测技术领域。本发明通过设置无人机信号检测系统来实现对贴地场景的模拟,并且各个场景参数调节均为自动化调节,无需人工进行设置,避免在繁多的测试环境部署中人工操作带来的参数误差,且避免消耗人力成本并能实现快速调节部署;通过测试流程实现了过程全自动化部署,操作人员只需要按照标准化流程设置创建信号检测事件集合,其余步骤均能自动化实施,从而降低检测成本增加检测准确度。
技术研发人员:常兴,刘志宇
受保护的技术使用者:武汉能钠智能装备技术股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!