车辆检查系统以及车辆检查方法与流程
本公开涉及检查车辆的检查系统。
背景技术:
1、日本特开2015-191548公开了能够在行驶环境下实时地检测摄像头的光轴偏移(光轴异常)的车外监视装置。在该技术中,基于对车辆的前方进行拍摄而得到的图像,以一次以上的近似式对白线进行近似。并且,基于该近似式的常数,算出车辆行驶了设定时间时的车辆的横向位置相对于白线的变化量(第1横向移动量)。另外,基于该近似式的一次系数,算出车辆行驶了设定时间时的车辆的横向位置相对于白线的变化量(第2横向移动量)。进一步,在第1横向移动量与第2横向移动量之差为预先设定的阈值以上的情况下,判定为产生了水平方向上的摄像头的光轴异常。
技术实现思路
1、在检测到摄像头的光轴异常的情况下,作为产生了该光轴异常的要因,考虑摄像头的故障、安装于车辆的摄像头的位置偏移等。在该情况下,难以在销售店中确定使得产生了该光轴异常的异常要因部位,车辆的诊断所需要的期间有可能会长期化。另外,有可能连不需要修理的部位都会进行修理。
2、本公开的一个目的在于提供能够在检测到摄像头的光轴异常的情况下确定使得产生了该光轴异常的异常要因部位的技术。
3、本公开的第1观点涉及对车辆进行检查的车辆检查系统。
4、车辆检查系统具备计算机,该计算机连接于搭载在车辆的前方的第1摄像头和搭载在车辆的后方的第2摄像头。
5、计算机取得在车辆的行驶中由第1摄像头拍摄到的第1摄像头图像,并且取得在由第1摄像头拍摄第1摄像头图像的同时由第2摄像头拍摄到的第2摄像头图像。
6、另外,计算机根据第1摄像头图像计算第1光轴坐标值,根据第2摄像头图像计算第2光轴坐标值。
7、进一步,计算机对第1光轴坐标值和第2光轴坐标值分别判定异常的有无。
8、再进一步,计算机构成为基于第1光轴坐标值的异常的有无和第2光轴坐标值的异常的有无的组合,从第1摄像头、第2摄像头、以及车辆的车身中确定使第1光轴坐标值和第2光轴坐标值的一方或双方产生异常的异常要因部位。
9、本公开的第2观点涉及对车辆进行检查的车辆检查方法。
10、车辆检查方法包括:
11、取得在车辆的行驶中由搭载在车辆的前方的第1摄像头拍摄到的第1摄像头图像,并且取得在由第1摄像头拍摄所述第1摄像头图像的同时由搭载在车辆的后方的第2摄像头拍摄到的第2摄像头图像;
12、根据第1摄像头图像计算第1光轴坐标值;
13、根据第2摄像头图像计算第2光轴坐标值;
14、对第1光轴坐标值和第2光轴坐标值分别判定异常的有无;以及
15、基于第1光轴坐标值的异常的有无和第2光轴坐标值的异常的有无的组合,从第1摄像头、第2摄像头、以及车辆的车身中确定使第1光轴坐标值和第2光轴坐标值的一方或双方产生异常的异常要因部位。
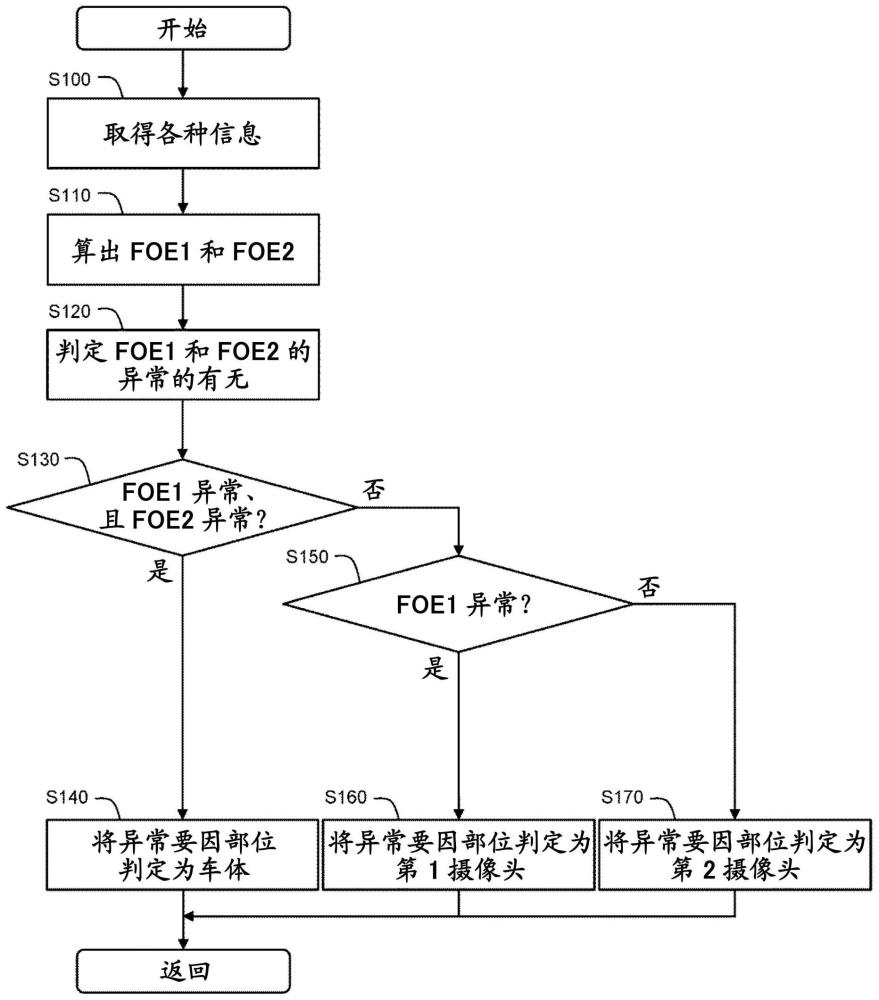
16、根据本公开,车辆检查系统基于在车辆的行驶中取得的第1摄像头图像和第2摄像头图像,取得第1光轴坐标值和第2光轴坐标值。另外,车辆检查系统对第1光轴坐标值和第2光轴坐标值分别判定异常的有无。
17、进一步,车辆检查系统基于第1光轴坐标值的异常的有无和第2光轴坐标值的异常的有无的组合,从第1摄像头、第2摄像头、以及车辆的车体中确定使第1光轴坐标值和第2光轴坐标值的一方或者双方产生异常的异常要因部位。
18、由此,即使是在产生了光轴异常的情况下,也能以短时间确定异常要因部位,进一步,限定于需要修理的部位来进行修理。
技术特征:
1.一种车辆检查系统,对车辆进行检查,所述车辆检查系统具备计算机,该计算机连接于搭载在所述车辆的前方的第1摄像头和搭载在所述车辆的后方的第2摄像头,
2.根据权利要求1所述的车辆检查系统,
3.根据权利要求2所述的车辆检查系统,
4.根据权利要求2所述的车辆检查系统,
5.一种车辆检查方法,对车辆进行检查,
技术总结
提供一种车辆检查系统以及车辆检查方法。车辆检查系统取得在车辆的行驶中由搭载于车辆的前方的第1摄像头拍摄到的第1摄像头图像和由搭载于车辆的后方的第2摄像头拍摄到的第2摄像头图像。另外,车辆检查系统根据第1摄像头图像算出第1光轴坐标值,根据第2摄像头图像算出第2光轴坐标值。进一步,车辆检查系统对第1光轴坐标值和第2光轴坐标值分别判定异常的有无。再进一步,车辆检查系统基于第1光轴坐标值的异常的有无和第2光轴坐标值的异常的有无的组合,从第1摄像头、第2摄像头、以及车辆的车体中确定使第1光轴坐标值和第2光轴坐标值的一方或者双方产生异常的异常要因部位。
技术研发人员:立住优介
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/5/6
- 还没有人留言评论。精彩留言会获得点赞!