一种对于车辆行驶数据的处理方法及装置与流程
本申请涉及智能交通,具体涉及一种对于车辆行驶数据的处理方法及装置。
背景技术:
1、随着人工智能的突破性发展,智能交通相关技术的也飞速发展,我国提出了适应中国国情的“单车智能+车路协同”的方案,车路协同方案在道路上安装路侧设备,部分用于感知道路交通参与者状态,路侧感知设备能够感知道路远处的目标,能够实现单车无发实现的超视距感知功能,结合单车的感知功能,能够实现智能驾驶更强环境感知能力,方便其他应用进行进一步数据处理。
2、现有技术中,采用的路侧感知设备对道路交通进行感知,将感知到的目标信息提供给智能云端,可辅助车辆进行决策规划。由于路侧感知设备的采用的相机、雷达存在各种误差,因此路侧设备输出的目标轨迹存在偏差,直观表现为感知的目标轨迹点沿真实的轨迹抖动;为保证路侧设备输出轨迹的质量,需要对感知轨迹进行平滑处理。轨迹平滑最常用的是卡尔曼滤波,卡尔曼滤波分为两个阶段:预测、测量更新。预测阶段是使用运动学模型进行外推,常见的运动学模型如匀速直线(cv)、匀加速直线(ca)、匀速转弯(ctrv)等,测量更新阶段是根据新的测量信息对预测的结果进行修正,防止预测偏差过大。但是卡尔曼滤波方法的准确性依赖于运动学模型,由于道路上的运动目标在运动时存在一定的随机性,导致该方法对应的模型无法覆盖运动目标所有运动状态;在进行轨迹平滑时,经常达不到预期的效果,输出的轨迹与车辆实际行驶轨迹偏差较大;因此急需一种可以稳定输出与车辆实际轨迹偏差更低,符合度更高的轨迹平滑方法。
3、基于此,特提出本申请,利用本申请所述的方法对路侧感知设备采集到的目标数据进行处理,可输出与车辆的实际轨迹偏差更低,符合度更高的行驶轨迹。
技术实现思路
1、本说明书实施例提供一种对于车辆行驶数据的处理方法及装置,解决了现有技术中采用卡尔曼滤波方法对路侧感知设备进行数据处理导致的输出轨迹与车辆实际轨迹存在较大偏差的问题;利用本申请的方法对车辆数据进行处理,输出与车辆的实际轨迹偏差更低,符合度更高的行驶轨迹。
2、为解决上述技术问题,本说明书实施例是这样实现的:
3、第一方面,本说明书实施例提供了一种对于车辆行驶数据的处理方法,其特征在于,包括:
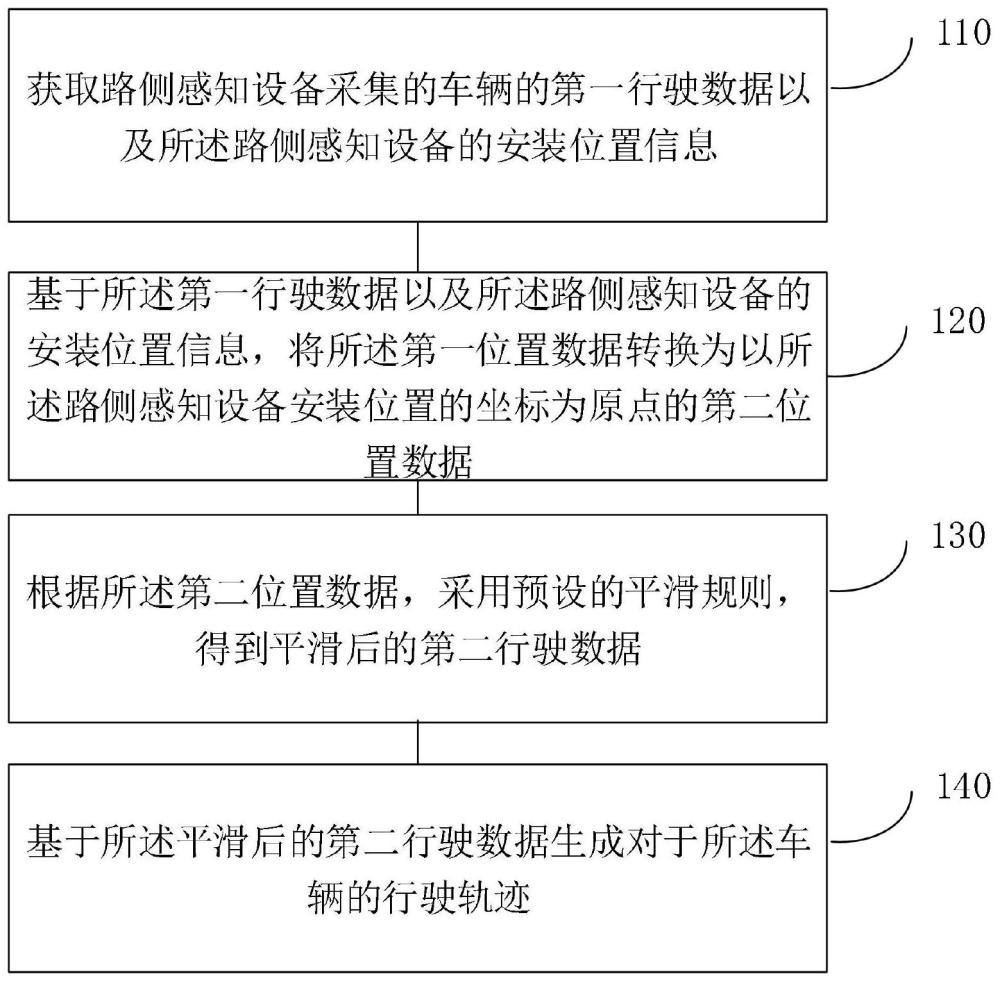
4、获取路侧感知设备采集的车辆的第一行驶数据以及所述路侧感知设备的安装位置信息;所述第一行驶数据包括第一位置数据;
5、基于所述第一行驶数据以及所述路侧感知设备的安装位置信息,将所述第一位置数据转换为以所述路侧感知设备安装位置的坐标为原点的第二位置数据;
6、根据所述第二位置数据,采用预设的平滑规则,得到平滑后的第二行驶数据;
7、基于所述平滑后的第二行驶数据生成对于所述车辆的行驶轨迹。
8、第二方面,本说明书实施例提供了一种对于车辆行驶数据的处理装置,其特征在于,包括:
9、获取模块,所述获取模块用于获取路侧感知设备采集的车辆的第一行驶数据以及所述路侧感知设备的安装位置信息;所述第一行驶数据包括第一位置数据;
10、转换模块,所述转换模块用于基于所述第一行驶数据以及所述路侧感知设备的安装位置信息,将所述第一位置数据转换为以所述路侧感知设备安装位置的坐标为原点的第二位置数据;
11、平滑模块,所述平滑模块用于根据所述第二位置数据,采用预设的平滑规则,得到平滑后的第二行驶数据;
12、生成模块,所述生成模块用于基于所述平滑后的第二行驶数据生成对于所述车辆的行驶轨迹。
13、本说明书实施例采用上述至少一个技术方案能够达到以下有益效果:
14、通过获取路侧感知设备采集的车辆的第一行驶数据以及所述路侧感知设备的安装位置信息,所述第一行驶数据包括第一位置数据;基于所述第一行驶数据以及所述路侧感知设备的安装位置信息,将所述第一位置数据转换为以所述路侧感知设备安装位置的坐标为原点的第二位置数据;根据所述第二位置数据,采用预设的平滑规则,得到平滑后的第二行驶数据;基于所述平滑后的第二行驶数据生成对于所述车辆的行驶轨迹;基于此,利用本申请的数据处理方法对路侧感知设备采集到的车辆数据进行处理后输出行驶轨迹,实现了输出的行驶轨迹与所述车辆的实际行驶轨迹的偏差更低,符合度更高。
技术特征:
1.一种对于车辆行驶数据的处理方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述将所述第一位置数据转换为以所述路侧感知设备安装位置的坐标为原点的第二位置数据,包括:
3.如权利要求1所述的方法,其特征在于,所述第一行驶数据还包括第一速度数据,在采用预设的平滑规则进行平滑处理之前,包括:
4.如权利要求3所述的方法,其特征在于,所述将所述第二位置数据和所述第一速度数据转换为所述车辆行驶方向上的第三位置数据和第三速度数据,包括:
5.如权利要求3所述的方法,其特征在于,所述采用预设的平滑规则,得到平滑后的第二行驶数据,包括:
6.如权利要求5所述的方法,其特征在于,所述利用所述轨迹平滑系数,对所述第三位置数据进行数据平滑,得到第四位置数据,包括:
7.如权利要求6所述的方法,其特征在于,所述采用预设的用于轨迹平滑的平滑规则确定轨迹平滑系数,还包括:
8.如权利要求5所述的方法,其特征在于,所述将所述第四位置数据转换为以所述路侧感知设备的安装位置为原点的坐标系为直角坐标系的第五位置数据,包括:
9.如权利要求5所述的方法,其特征在于,所述将所述第五位置数据转换为坐标系为大地坐标系的第六位置数据,包括:
10.一种对于车辆行驶数据的处理装置,其特征在于,包括:
技术总结
本说明书实施例公开了一种对于车辆行驶数据的处理方法以及装置,该方案包括:通过获取路侧感知设备采集的车辆的第一行驶数据以及所述路侧感知设备的安装位置信息;所述第一行驶数据包括第一位置数据;基于所述第一行驶数据以及所述路侧感知设备的安装位置信息,将所述第一位置数据转换为以所述路侧感知设备安装位置的坐标为原点的第二位置数据;根据所述第二位置数据,采用预设的平滑规则,得到平滑后的第二行驶数据;基于所述平滑后的第二行驶数据生成对于所述车辆的行驶轨迹。使得输出的行驶轨迹与车辆的实际行驶轨迹的偏差更低,符合度更高。
技术研发人员:饶晋
受保护的技术使用者:云控智行科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!