一种基于重叠社区模型的多智能体一致性控制方法
本发明涉及多智能体协同控制,具体为一种基于重叠社区模型的多智能体一致性控制方法。
背景技术:
1、多智能体系统作为分布式人工智能中的一大重要部分,由于具有鲁棒性、灵活性和可扩展性等特点与优势,在完成大规模复杂任务方面有着明显的优势,且可以完成很多单一智能体无法完成的综合复杂任务。在自动驾驶、智能电网、强化学习、无线传感网络等领域都有广泛的研究与应用。
2、其中,一致性问题作为多智能体协同控制中最基础的研究课题之一,受到了国内外众多研究者的广泛关注。一致性协议是智能体与邻居间信息交换的交互规则,设计该协议的主要目标是使所有智能体都能实现共同的状态值。
3、目前,大部分多智能体一致性研究只考虑多智能体系统中点对点的连通模式,每个智能体均依据点对点的多智能体架构与邻居直接进行状态的共享和自身状态的更新,而忽视了网络拓扑中固有的分层本质特性,即网络表现出一种社区化特征,这些复杂网络的一些社区结构一般都由不同社区组成。不同社区之间重叠部分的节点,充当起社区之间信息沟通的“桥梁”,能够带来更多异质信息,维护全局网络的连通性,促进系统信息的交流。此外,大部分多智能体一致性协议为网络拓扑中的边分配相同的权重,未能考虑不同节点之间的强弱关系给予权重,导致系统更容易收敛到较多簇。
技术实现思路
1、鉴于现有一种基于重叠社区模型的多智能体一致性控制方法中存在的问题,提出了本发明。
2、因此,本发明的目的是提供一种基于重叠社区模型的多智能体一致性控制方法,解决了的问题。
3、为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
4、一种基于重叠社区模型的多智能体一致性控制方法,具体包括以下步骤:
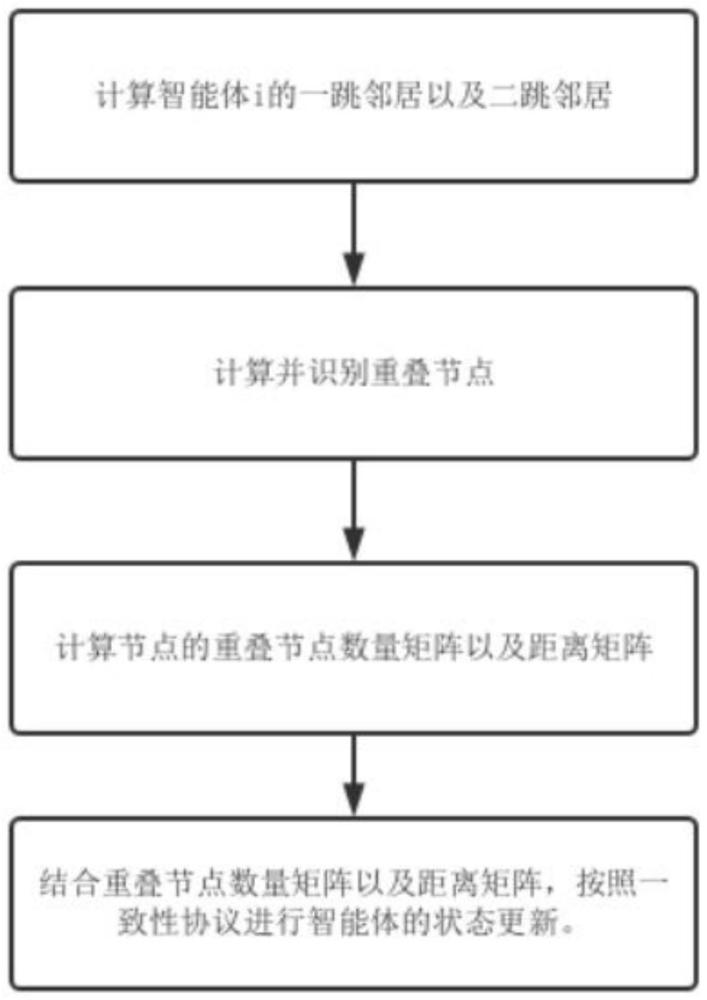
5、步骤1,遍历系统所有智能体节点,计算每个节点的所有一跳邻居,存储一跳邻居信息智能体与其一跳邻居视作一个子社区;根据一跳邻居判断筛选出二跳邻居,存储二跳邻居信息
6、步骤2,遍历所有节点,判断节点是否为重叠节点,重叠节点既属于智能体的一跳邻居又为智能体二跳邻居的一跳邻居通过计算与的交集得到重叠节点;
7、步骤3,计算当前节点各个象限的重叠节点的数量niq(k),判断节点一跳邻居处于当前节点的第几象限,根据该象限的值niq(k)计算出当前节点的重叠节点数量矩阵;循环该步骤直到系统中所有节点遍历完成;
8、步骤4,遍历当前节点的各个一跳邻居,并分别计算与各一跳邻居之间的欧式距离,根据距离信息计算出智能体的距离矩阵,循环该步骤直到系统所有节点遍历完成;
9、步骤5,遍历所有智能体节点,结合重叠节点数量矩阵以及邻居节点的距离矩阵,通过以下公式,分别进行智能体状态更新;
10、
11、步骤6,判断多智能体系统当前时刻是否收敛一致,若多智能体节点v中,任意两个智能体的状态满足以下公式,则多智能体演化更新结束,表示该多智能体系统收敛一致。
12、
13、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:由于智能体的通信距离有限,通过感知半径获得邻居集合,所述的一跳邻居可以描述为:
14、
15、其中,i表示第i个智能体,xi(k)表示第i个智能体在k时刻的状态信息,j表示一跳邻居,xj(k)表示一跳邻居j在k时刻的状态信息,rc表示多智能体具有的有限通信半径。
16、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:若两智能体之间不存在直接的一跳关系且拥有至少一个共同的一跳邻居,则两智能体互为二跳邻居;所述的二跳邻居集可以描述为:
17、
18、其中,表示n属于i的一跳邻居,xn(k)定义为智能体n的状态信息,m表示智能体n的一跳邻居,xm(k)定义为智能体m的状态信息。
19、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:根据智能体的一跳以及二跳邻居信息,所述的重叠节点集可以表述为:
20、
21、其中,表示智能体p为i的二跳邻居,为智能体p的一跳邻居集,智能体i重叠节点集合表示为智能体i的一跳邻居集合与p的一跳邻居集合的交集。
22、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:智能体节点与重叠节点的相对位置为以当前智能体节点作为坐标原点作坐标轴,重叠节点位于该坐标轴的第几象限。
23、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:分别计算智能体节点i与二跳邻居节点p的重叠节点,按照象限划分,分别统计各个象限内的重叠点数量;重叠节点矩阵表示为:
24、
25、其中,niq(k)表示为节点i第q象限的重叠点数量,aij表示节点i的邻接矩阵。
26、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:智能体节点之间的距离矩阵表示为:
27、
28、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:智能体节点i与一跳邻居节点j之间的权重矩阵表示为:
29、
30、其中,niq(k)中q为一跳邻居j所在象限,此时取值也为此象限的重叠节点数量。
31、作为本发明所述的一种基于重叠社区模型的多智能体一致性控制方法的一种优选方案,其中:根据重叠点信息以及边的权重分配设计的基于重叠社区模型的一致性控制协议表示为:
32、
33、其中,ε为影响多智能体收敛性能的步长参数,通常为n为系统中多智能体的数量;dii(k)=diag{di(k)},dii(k)是与pij(k)有关的加权度矩阵。
34、与现有技术相比:
35、1、针对多智能体一致性控制问题,本发明提出了一种基于重叠社区模型的多智能体一致性控制方法;不同于传统研究中点与点之间关系对等,权重分配相同的方法,本发明充分挖掘并利用网络拓扑结构中潜在的有效信息,识别出网络拓扑中的重叠节点,该节点可以跨足多个子社区,因此在不同子社区之间搭建了桥梁;这使得它们达到不同社区间的信息互联与同步稳定,更快速地将信息传播到整个系统;通过深入了解重叠节点,可以更好地了解信息在系统内部的流动方式;
36、2、本发明考虑到距离以及不同智能体子社区重叠的信息,为拓扑中的边给予不同的权重,优化一致性算法,从而实现更高效的一致性。
技术特征:
1.一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,具体包括以下步骤:
2.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,由于智能体的通信距离有限,通过感知半径获得邻居集合,所述的一跳邻居可以描述为:
3.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,若两智能体之间不存在直接的一跳关系且拥有至少一个共同的一跳邻居,则两智能体互为二跳邻居;所述的二跳邻居集可以描述为:
4.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,根据智能体的一跳以及二跳邻居信息,所述的重叠节点集可以表述为:
5.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,智能体节点与重叠节点的相对位置为以当前智能体节点作为坐标原点作坐标轴,重叠节点位于该坐标轴的第几象限。
6.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,分别计算智能体节点i与二跳邻居节点p的重叠节点,按照象限划分,分别统计各个象限内的重叠点数量;重叠节点矩阵表示为:
7.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,智能体节点之间的距离矩阵表示为:
8.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,智能体节点i与一跳邻居节点j之间的权重矩阵表示为:
9.根据权利要求1所述的一种基于重叠社区模型的多智能体一致性控制方法,其特征在于,根据重叠点信息以及边的权重分配设计的基于重叠社区模型的一致性控制协议表示为:
技术总结
本发明公开了一种基于重叠社区模型的多智能体一致性控制方法,具体包括以下步骤:步骤1,遍历系统所有智能体节点,计算每个节点的所有一跳邻居,存储一跳邻居信息智能体与其一跳邻居视作一个子社区,涉及多智能体协同控制技术领域,不同于传统研究中点与点之间关系对等,权重分配相同的方法,本发明充分挖掘并利用网络拓扑结构中潜在的有效信息,识别出网络拓扑中的重叠节点,该节点可以跨足多个子社区,因此在不同子社区之间搭建了桥梁;这使得它们达到不同社区间的信息互联与同步稳定,更快速地将信息传播到整个系统;通过深入了解重叠节点,可以更好地了解信息在系统内部的流动方式。
技术研发人员:贺薇
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!