一种基于低载重的系留无人机的升空通信装置的制作方法
本发明公开了一种基于低载重系留无人机的升空通信装置,属于遥控遥测,该装置特别针对通信装置无法整体升空情况下,功能模块拆分设计以及不依赖外部授时和低传输时延需求的优化设计,可以应用于基于低载重的系留无人机进行升空通信的点对两点或多点的业务传输。
背景技术:
1、在升空中继通信系统应用中,使用载重负荷小的系留无人机升空平台,无法满足通信装置所有功能模块整体上载至无人机平台,部分功能模块需拆分后进行接口互联设计,同时针对升空中继通信点对两点或多点传输的上下行链路各自进行同步带来的传输时延大等问题,进行同步方法优化设计。
技术实现思路
1、本发明所要解决的技术问题是基于低载荷系留无人机平台的通信装置功能模块设计,以及不依赖外部时钟信号的点对两点或多点传输链路的低时延通信需求。
2、为解决上述技术问题,本发明通过以下技术方案来实现:
3、一种基于低载重的系留无人机的升空通信装置,包括主站设备和至少两个从站设备;
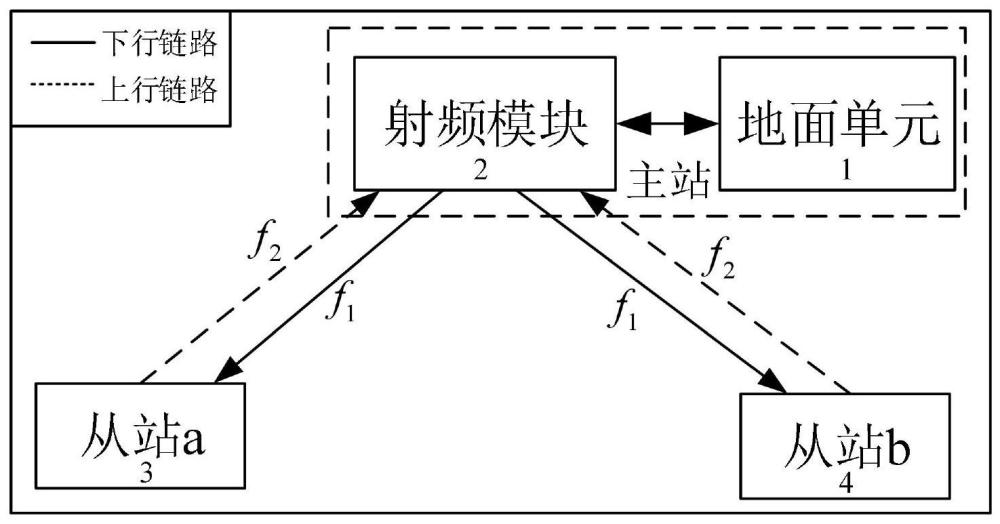
4、其中,主站设备包括地面单元1和射频模块2,其中,地面单元1放置于地面平台使用,用于基带信号处理;射频模块2设于系留无人机平面上,用于射频信号收发;
5、所述主站设备的地面单元1将业务信息与时钟同步信息进行处理后,通过系留线缆送至射频模块2;射频模块2将信号在频点f1上按时间顺序分别发送至从站a设备3和从站b设备4;从站a设备3收到射频模块2的信号后,分离时钟同步信息和业务信息,时钟同步信息用于上行链路同步,从站a设备3)根据上行链路同步信息形成业务发送时间顺序,从站a设备3在频点f2上按时间顺序发送业务信息;从站b设备4收到射频模块2的信号后,分离时钟同步信息和业务信息,时钟同步信息用于上行链路同步,从站b设备4根据上行链路同步信息形成业务发送时间顺序,从站b设备4在频点f2上按时间顺序发送业务信息。
6、进一步的,所述主站设备包括业务接口模块7、升空双模组网模块6、调制解调器模块5和计数器模块9;
7、主站设备的地面单元1通过业务接口模块7接收本地业务信息,将业务信息发送至升空双模组网模块6,升空双模组网模块6将接收到的业务信息与时钟同步信息按照从计数器模块9接收到的时序进行组合处理后,发送至调制解调器模块5,调制解调器模块5将收到的业务信息与时钟同步信息组合通过系留线缆发送至射频模块2,射频模块2将信号进行发送。
8、进一步的,所述升空双模组网模块包括下行链路帧结构时隙分配模块11和上行链路针结构时隙分配模块12;
9、根据业务信息传输速率和传输时延需求,下行链路帧结构时隙分配模块11将下行链路帧结构分别划分为多个子时隙,上行链路帧结构时隙分配模块12将上行链路帧结构分别划分为多个子时隙,并明确主站设备、从站a设备3、从站b设备4在上行链路和下行链路上的收发时隙。
10、进一步的,上行链路和下行链路的建立过程如下:
11、步骤1,在频点f1上,主站设备在下行链路第i个子时隙发送下行链路帧结构的时钟同步信息,在第ii~vi个子时隙发送业务信息;
12、步骤2,从站a设备3、从站b设备4同时在下行链路第1个子时隙完成同步信息接收,并根据接收到的下行链路时钟同步信息获知下行链路帧结构时钟对准信息;
13、步骤3,从站a设备3、从站b设备4将获知的下行链路帧结构时钟同步信息直接送至各自设备在上行链路帧时隙的时钟对准,完成上行链路时钟同步;
14、步骤4,上行链路同步建立后,在频点f2上,从站a设备3、从站b设备4分别根据预设的各自站点的上行链路发送时隙,进行各自的业务数据信息发送;
15、步骤5,上行链路和下行链路同步建立完成,转入步骤1,按照上行和下行各自的链路帧结构时隙进行循环工作。
16、本发明相比背景技术具有如下优点:
17、(1)在本发明方法中,点对两点无外部时钟源的工作模式下,较上行链路自行同步模式传输效率提高16.7%;
18、(2)本发明方法将主站设备功能模块进行分离,仅需要将射频模块升空,信息互联通过系留线缆传输,支持低载荷系留无人机升空通信系统使用;
19、(3)本发明方法支持两个或两个以上的从站设备与主站设备通信应用;
20、(4)本装置较所有设备工作于统一频点的模式,时延降低1倍,适用于低传输时延业务传输需求。
技术特征:
1.一种基于低载重的系留无人机的升空通信装置,其特征在于,包括主站设备和至少两个从站设备;
2.根据权利要求1所述的一种基于低载重的系留无人机的升空通信装置,其特征在于,所述主站设备包括业务接口模块(7)、升空双模组网模块(6)、调制解调器模块(5)和计数器模块(9);
3.根据权利要求2所述的一种基于低载重的系留无人机的升空通信装置,其特征在于,所述升空双模组网模块包括下行链路帧结构时隙分配模块(11)和上行链路针结构时隙分配模块(12);
4.根据权利要求3所述的一种基于低载重的系留无人机的升空通信装置,其特征在于,上行链路和下行链路的建立过程如下:
技术总结
本发明涉及一种基于低载重的系留无人机的升空通信装置,属于遥控遥测技术领域,其包括地面单元和射频模块,其中,地面单元放置于地面平台使用,用于基带信号处理;射频模块设于系留无人机平面上,用于射频信号收发;主站设备的地面单元将业务信息与时钟同步信息进行处理后,通过系留线缆送至射频模块;射频模块将信号在频点f<subgt;1</subgt;上按时间顺序分别发送至从站a设备和从站b设备;从站a设备收到射频模块的信号后,分离时钟同步信息和业务信息,从站a设备在频点f<subgt;2</subgt;上按时间顺序发送业务信息。本发明较所有设备工作于统一频点的模式,时延降低1倍,适用于低传输时延业务传输需求。
技术研发人员:徐聪,刘利强,魏巍,陈雁,沈泽巍,吕先望,刘思铭,贾倩,孙腾,张越
受保护的技术使用者:中国电子科技集团公司第五十四研究所
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!