一种多目相机控制云台相机方法、装置、设备及存储介质与流程
本发明属于计算机领域,尤其涉及一种多目相机控制云台相机方法、装置、设备及存储介质。
背景技术:
1、为了实现对大场景的无死角监控,往往会采用多目镜头和云台相机系统进行监控,即通过同时使用多个摄像头来捕捉广阔场景,提供更广角度的视野和更多细节。由于云台相机的监控范围更大且监控能力更好,因而在异常事件发生时,会通过云台相机对事件进行持续性追踪,从而促进了云台相机控制方法的发展。
2、现有技术的云台相机控制方法在进行处理时,会将其他摄像头得到的异常事件发生地的坐标转换为在全景图像下的全景坐标,再将全景坐标转换为最近的云台相机的运动参数,从而使得云台相机将镜头对准事件发生地,对事件进行持续性追踪。
3、但现有的云台相机控制方法并不能使得云台相机快速对准目标,实时性较差。
技术实现思路
1、本申请实施例的目的在于提供一种云台相机控制方法,旨在解决现有的云台相机控制方法实时性较差的问题。
2、本申请实施例是这样实现的,一种多目相机控制云台相机方法,所述方法包括:
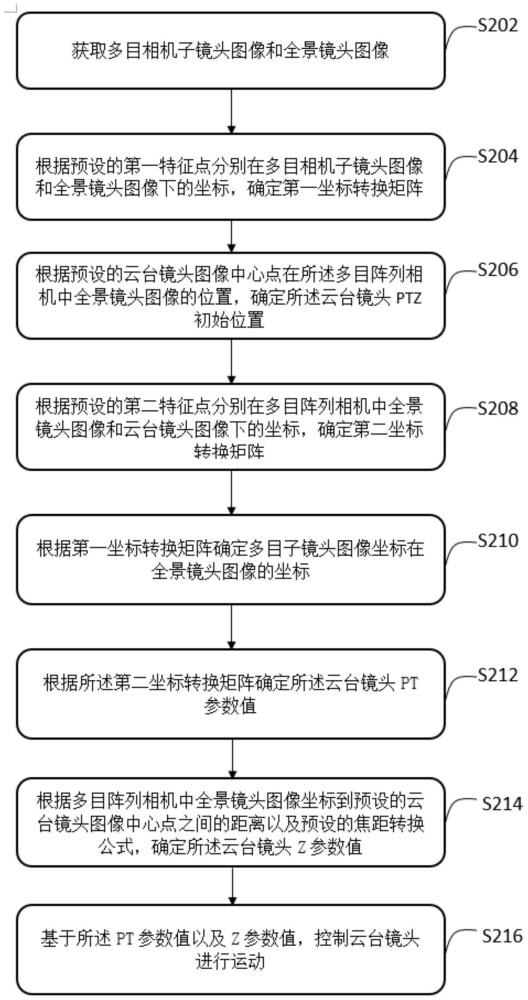
3、获取多目相机子镜头图像和全景镜头图像;
4、根据预设的第一特征点分别在多目相机子镜头图像和全景镜头图像下的坐标,确定第一坐标转换矩阵,所述第一坐标转换矩阵用于多目相机子镜头图像和全景镜头图像之间的坐标转换;
5、根据预设的云台镜头图像中心点在所述多目阵列相机中全景镜头图像的位置,确定所述云台镜头ptz初始位置;
6、根据预设的第二特征点分别在多目阵列相机中全景镜头图像和云台镜头图像下的坐标,确定第二坐标转换矩阵,所述第二坐标转换矩阵用于多目阵列相机中全景镜头图像和云台镜头图像之间的坐标转换;
7、根据所述第二坐标转换矩阵确定所述云台镜头pt参数值;
8、根据多目阵列相机中全景镜头图像坐标到预设的云台镜头图像中心点之间的距离以及预设的焦距转换公式,确定所述云台镜头z参数值;
9、基于所述pt参数值以及z参数值,控制云台镜头进行运动。
10、本申请实施例的另一目的在于一种云台相机控制装置,包括:
11、图像获取模块,用于获取多目相机子镜头图像和全景镜头图像;
12、第一坐标转换模块,用于根据预设的第一特征点分别在多目相机子镜头图像和全景镜头图像下的坐标,确定第一坐标转换矩阵,所述第一坐标转换矩阵用于多目相机子镜头图像和全景镜头图像之间的坐标转换;
13、第二坐标转换模块,用于根据预设的云台镜头图像中心点在所述多目阵列相机中全景镜头图像的位置,确定所述云台镜头ptz初始位置;根据预设的第二特征点分别在多目阵列相机中全景镜头图像和云台镜头图像下的坐标,确定第二坐标转换矩阵,所述第二坐标转换矩阵用于多目阵列相机中全景镜头图像和云台镜头图像之间的坐标转换;
14、云台参数确定模块,用于根据所述第二坐标转换矩阵确定所述云台镜头pt参数值;根据多目阵列相机中全景镜头图像坐标到预设的云台镜头图像中心点之间的距离以及预设的焦距转换公式,确定所述云台镜头z参数值;
15、云台相机控制模块,用于基于所述pt参数值以及z参数值,控制云台镜头进行运动。
16、本申请的另一目的在于一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行上述一种云台相机控制方法的步骤。
17、本申请的另一目的在于一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述一种云台相机控制方法的步骤。
18、本申请实施例提供的一种云台相机控制方法,通过获取在多目相机子镜头图像下的坐标;根据所述多目相机子镜头图像坐标以及预设的第一坐标转换矩阵,确定全景镜头图像坐标,根据所述全景镜头图像坐标以及预设的第二坐标转换矩阵,确定云台镜头的运动参数;根据所述全景镜头图像坐标到云台镜头预设位置的图像中心点之间的距离以及预设的焦距转换公式,确定云台镜头的焦距参数;基于所述运动参数以及焦距参数,控制云台镜头进行运动,从而使得云台镜头能够直接对准目标地点,无效二次调整,提高了云台镜头的实时性。
技术特征:
1.一种多目相机控制云台相机方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种多目相机控制云台相机方法,其特征在于,所述根据预设的第一特征点分别在多目相机子镜头图像和全景镜头图像下的坐标,确定第一坐标转换矩阵,包括:
3.根据权利要求1所述的一种多目相机控制云台相机方法,其特征在于,根据预设的第二特征点分别在多目阵列相机中全景镜头图像和云台镜头图像下的坐标,确定第二坐标转换矩阵,确定第二坐标转换矩阵,包括:
4.根据权利要求1所述的一种云台相机控制方法,其特征在于,所述根据根据多目阵列相机中全景镜头图像坐标到预设的云台镜头图像中心点之间的距离以及预设的焦距转换公式,确定所述云台镜头z参数值,包括:
5.根据权利要求4所述的一种云台相机控制方法,其特征在于,所述根据所述多个区域的中心点坐标与云台镜头预设位置的图像中心点之间的距离,确定焦距转换公式,包括:
6.一种云台相机控制装置,其特征在于,包括:
7.一种计算机设备,其特征在于,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1至5中任一项权利要求所述的一种云台相机控制方法的步骤。
8.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至5中任一项权利要求所述的一种云台相机控制方法的步骤。
技术总结
本发明适用于计算机领域,提供了一种多目相机控制云台相机方法、装置、设备及存储介质,其中,方法包括:获取多目相机子镜头图像和全景镜头图像;根据预设的第一特征点分别在多目相机子镜头图像和全景镜头图像下的坐标,确定第一坐标转换矩阵;根据预设的云台镜头图像中心点在多目阵列相机中全景镜头图像的位置,确定云台镜头PTZ初始位置;根据预设的第二特征点分别在多目阵列相机中全景镜头图像和云台镜头图像下的坐标,确定第二坐标转换矩阵;根据多目阵列相机中全景镜头图像坐标到预设的云台镜头图像中心点之间的距离以及预设的焦距转换公式,确定云台镜头Z参数值,使得云台相机能够直接对准目标地点,无需二次调整,提高了云台相机的实时性。
技术研发人员:朱逸帆,周红飞
受保护的技术使用者:上海长光以立信息科技有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!