一种视频拼接方法、装置、电子设备及存储介质与流程
本公开涉及机器人领域,尤其涉及一种视频拼接方法、装置、电子设备及存储介质。
背景技术:
1、履带式小型排爆机器人在执行搜索与排除危险物的过程中,机器人需要实时感知周围的环境,以便顺利完成搜索与排除危险物的任务。
2、在机器人在执行搜索与排除危险物的过程中,需要对机器人各个方位摄像头获取的视频进行拼接,来确定机器人周围的环境。相关技术中,通过人为选择要拼接的视频,造成视频拼接效率低,从而导致机器人工作效率较低。
技术实现思路
1、本公开提供了一种视频拼接方法、装置、电子设备及存储介质。
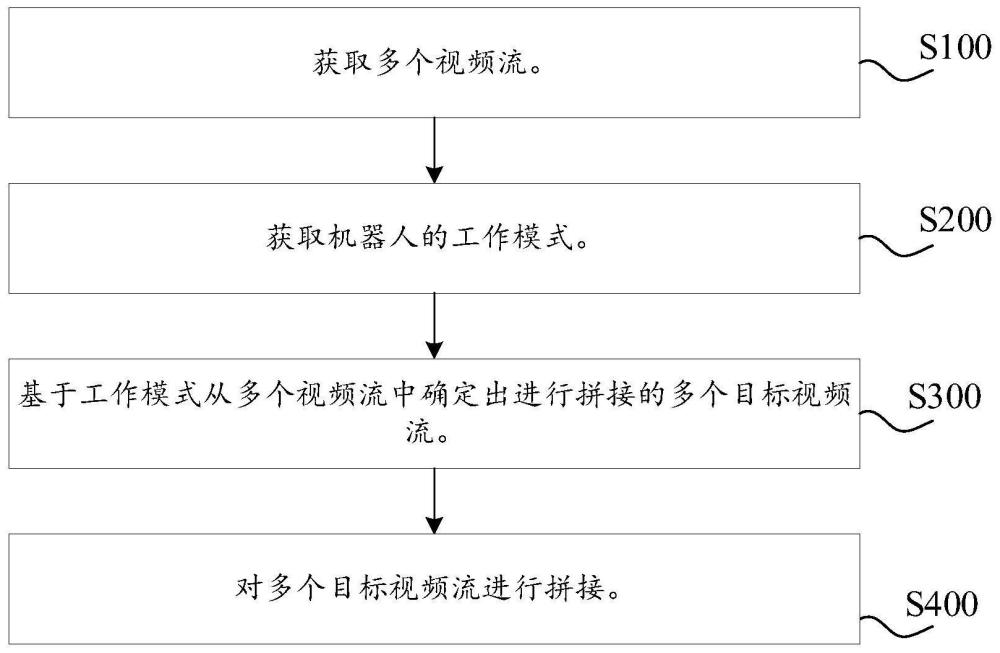
2、根据本公开的第一方面,提供了一种视频拼接方法,所述方法包括:获取多个视频流,所述多个视频流通过所述机器人不同部位的摄像头得到;获取所述机器人的工作模式;基于所述工作模式从所述多个视频流中确定出进行拼接的多个目标视频流;对所述多个目标视频流进行拼接。
3、根据本公开的第二方面,提供了一种视频拼接装置,所述装置包括:获取模块,用于获取多个视频流,所述多个视频流通过所述机器人不同部位的摄像头得到;所述获取模块,还用于获取所述机器人的工作模式;确定模块,用于基于所述工作模式从所述多个视频流中确定出进行拼接的多个目标视频流;拼接模块,用于对所述多个目标视频流进行拼接。
4、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现如以上所述的方法。
5、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现本公开的上述方法。
6、本公开实施例提供的视频拼接方法、装置、电子设备及存储介质,通过获取多个视频流,所述多个视频流通过所述机器人不同部位的摄像头得到;获取所述机器人的工作模式;基于所述工作模式从所述多个视频流中确定出进行拼接的多个目标视频流;对所述多个目标视频流进行拼接。能够根据机器人的工作模式选择要拼接的视频,提高了机器人的工作效率。
技术特征:
1.一种视频拼接方法,其特征在于,应用于机器人,所述机器人在不同部位设置有摄像头,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述工作模式包括搜索模式和排除危险物模式,所述机器人的前端、后端以及顶端分别设置有摄像头,所述基于所述工作模式从所述多个视频流中确定出进行拼接的多个目标视频流,包括:
3.根据权利要求2所述的方法,其特征在于,所述机器人还包括机械手爪,所述机械手爪上设置有摄像头,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述手爪上的摄像头为深度相机,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述对所述多个目标视频流进行拼接,包括:
6.一种视频拼接装置,其特征在于,所述装置包括:
7.一种电子设备,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得所述电子设备能够执行如权利要求1-5中任一项所述的方法。
技术总结
本公开涉及一种视频拼接方法、装置、电子设备及存储介质,其方法包括:获取多个视频流,多个视频流通过机器人不同部位的摄像头得到;获取机器人的工作模式;基于工作模式从多个视频流中确定出进行拼接的多个目标视频流;对多个目标视频流进行拼接。该方法能够根据机器人的工作模式选择要拼接的视频,减少了拼接视频花费的时间,提高了机器人的工作效率。
技术研发人员:徐洋洋,郁肖飞,沈志航,王芳,李硕
受保护的技术使用者:航天科工智能机器人有限责任公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!