一种多维感知全景视觉系统的制作方法
本技术属于电子电路,具体涉及多维感知全景视觉系统。
背景技术:
1、目前对于多维感知全景视觉系统,应当具备当前主流视频监控摄像机功能,但是当前的技术是全景摄像时需要旋转摄像头,这样的话对于数据的采集会出现延时或者偏差,特别是在光线较差或环境复杂场合,对声源定位,眼见为实的需求日益突出,并带来现存“监控探头”不具备的优势
2、鉴于当前全景视觉系统的现状,迫切需要不需要旋转摄像头,即能实现全景视觉的替换系统,其能通过捕捉危险、感知故障的声源作为第一触发坐标,引导全景相机瞬间拍摄关键声源定位对象,迅速做出判断。
技术实现思路
1、本实用新型的目的在于提供一种多维感知全景视觉系统。本实用新型基于阵列计算的多维感知全景视觉系统,具备当前主流视频监控摄像机功能,通过捕捉危险、感知故障的声源作为第一触发坐标,引导全景相机瞬间拍摄关键声源定位对象。
2、为实现上述目的,本实用新型提供如下技术方案:
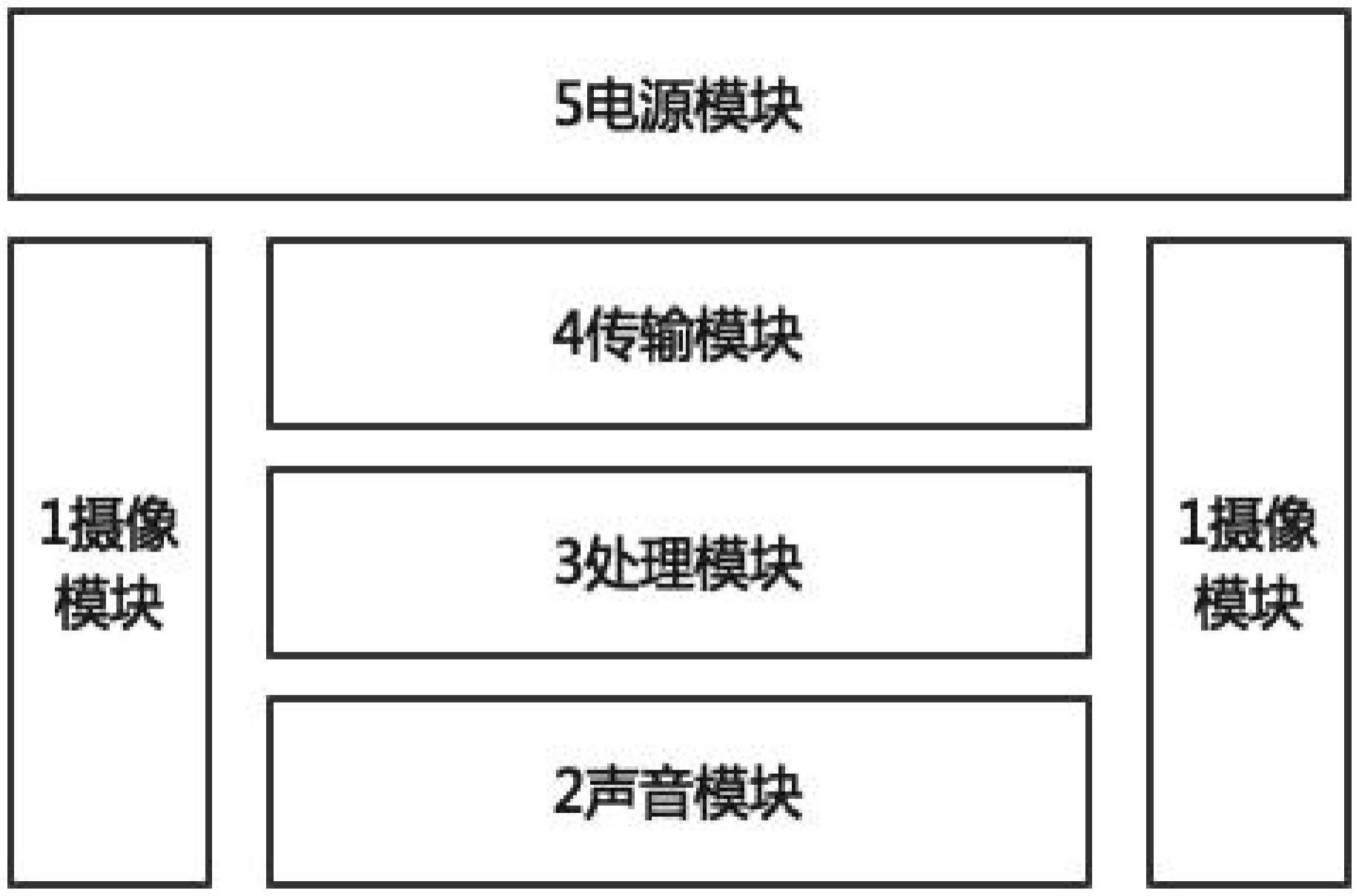
3、一种多维感知全景视觉系统,包括:
4、处理模块,所述处理模块进行视觉数据处理及判定;
5、声音模块;所述声音模块通过采集声源,声源定向后,全景视觉装置迅速调整摄像采集方位并实时跟拍;
6、摄像模块,所述摄像模块通过摄像头把观测范围内的一切事物进行视觉数据采集;
7、传输模块,所述传输模块采用无线或者有线方式传输到后台中心,进行存储、分析和展示;
8、电源模块,所述电源模块给摄像模块、声音模块、处理模块、传输模块提供直接供电或者通过电池供电,保证各模块的连续使用。
9、作为本实用新型一种优选的方案,所述声音模块和所述摄像模块各由若干个传感器组成,以水平共心多尺度分布。
10、作为本实用新型一种优选的方案,所述处理模块采用芯片gsg-3082,所述芯片gsg-3082通过接口ch0、ch1、ch2、ch3、ch4电性连接摄像模块,所述摄像模块采用cmos1080p摄像组件。
11、作为本实用新型一种优选的方案,所述芯片gsg-3082通过接口ch5电性连接声音模块,所述声音模块采用电容话筒阵列形式组成,所述电容话筒最多10套。
12、作为本实用新型一种优选的方案,所述处理模块将采集到的多维感知传感数据进行处理后通过传输模块进行传输,所述声音模块、摄像模块组成多维感知传感器,所述多维感知传感器将采集到的数据传输给处理模块进行数据处理。
13、作为本实用新型一种优选的方案,所述传输模块由线性稳压器bl1117、线性稳压器cj78l05、芯片88e1510以及poe交换机所组成,所述线性稳压器bl1117和芯片88e1510电性连接在芯片gsg-3082,所述线性稳压器bl1117通过线性稳压器cj78l05与poe交换机电性连接,所述芯片gsg-3082通过芯片88e1510与poe交换机电性连接。
14、与现有技术相比,本实用新型的有益效果是:
15、本多维感知全景视觉系统监控区域不留死角全方位覆盖拍摄,特别是异常人员、可疑物体、意外情况可瞬间进行异响声源定位捕捉,没有传统云台的旋转时间差和机械故障隐患;高声、异响等声源定向后,全景相机迅速发现发生物体并实施跟拍(画面放大),同时周边现场景物及时确认,可快速把握人员姿态、危害程度,为事后评估回放提供正确信息。全景记录更能感受现场气氛,无论全景现场记录、会议、直播、聊天,都可及时特写拍摄,参与者既可以看到现场全景,又可面对发言人交互,增进参与度提升临场感。
技术特征:
1.一种多维感知全景视觉系统,其特征在于,包括:
2.根据权利要求1所述的一种多维感知全景视觉系统,其特征在于,所述声音模块和所述摄像模块各由若干个传感器组成,以水平共心多尺度分布。
3.根据权利要求1所述的一种多维感知全景视觉系统,其特征在于,所述处理模块采用芯片gsg-3082,所述芯片gsg-3082通过接口ch0、ch1、ch2、ch3、ch4电性连接摄像模块,所述摄像模块采用cmos1080p摄像组件。
4.根据权利要求3所述的一种多维感知全景视觉系统,其特征在于,所述芯片gsg-3082通过接口ch5电性连接声音模块,所述声音模块采用电容话筒阵列形式组成,所述电容话筒最多10套。
5.根据权利要求1所述的一种多维感知全景视觉系统,其特征在于,所述处理模块将采集到的多维感知传感数据进行处理后通过传输模块进行传输,所述声音模块、摄像模块组成多维感知传感器,所述多维感知传感器将采集到的数据传输给处理模块进行数据处理。
6.根据权利要求1所述的一种多维感知全景视觉系统,其特征在于,所述传输模块由线性稳压器bl1117、线性稳压器cj78l05、芯片88e1510以及poe交换机所组成,所述线性稳压器bl1117和芯片88e1510电性连接在芯片gsg-3082,所述线性稳压器bl1117通过线性稳压器cj78l05与poe交换机电性连接,所述芯片gsg-3082通过芯片88e1510与poe交换机电性连接。
技术总结
本技术提供一种多维感知全景视觉系统,属于电子技术领域,该方案设计采用基于阵列计算的多维感知全景视觉系统,其由处理模块、声音模块、摄像模块、传输模块、电压模块所组成,处理模块进行视觉数据处理及判定;声音模块通过采集声源,声源定向后,全景视觉装置迅速调整摄像采集方位并实时跟拍;摄像模块通过摄像头把观测范围内的一切事物进行视觉数据采集;传输模块采用无线或者有线方式传输到后台中心,进行存储、分析和展示;电源模块给各提供直接供电或者通过电池供电,保证各模块的连续使用。本技术旨在通过一种基于阵列计算的多维感知全景视觉装置,具备当前主流视频监控摄像机功能。
技术研发人员:房砚海,宋文辉,郭常杰
受保护的技术使用者:航天正通汇智(北京)科技股份有限公司
技术研发日:20230215
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!