一种机器人作业监控系统的制作方法
本技术涉及自动机械设备,特别涉及一种机器人作业监控系统。
背景技术:
1、机器人是一种多功能、多自由度的机电一体化自动机械设备和系统,通过重复编程和自动控制,可以完成制造过程中的一些操作任务。结合制造主机或生产线,可形成单机或多机自动化系统,实现搬运、焊接、装配、喷涂等生产操作。目前,机器人技术发展迅速,在生产中得到了越来越广泛的应用,已成为现代生产中重要的高度自动化设备。
2、机器人常用的五大应用领域有:机械加工辅助、喷涂、装配、焊接、搬运等。无论是应用于哪一个领域,机器人的作业场合一般配备有摄像头进行监控。监控的目的可以是监控机器人的作业状态以达到及时发现问题并改正,也可以将监控视频用于作业对象的加工过程核实、加工数量统计等。例如通过翻看监控视频调取某个工件的机器人作业过程;通过监控视频核实机器人在某个对应时段的加工数量等。
3、现有技术中,监控视频没对应第三方时钟显示,缺乏公信力;通过监控视频要查找某一工件对应的作业视频或统计视频时间段的加工数量费时费力;监控系统多为独立的系统,没有跟工厂mes系统或erp系统连接,不能充分发挥监控视频的作用。
技术实现思路
1、本实用新型的目的在于提供一种机器人作业监控系统,用于解决上述至少一个技术问题,其能够将启动或完成指定作业的视频与时间戳相对应,可以自动统计机器人对应作业时间段的生产数目,且非常便捷地实现有据可查,减少供需双方的矛盾。
2、本实用新型的实施例是这样实现的:
3、一种机器人作业监控系统,其包括作业模块、信号采集模块、监控模块、处理模块和分类存储模块。
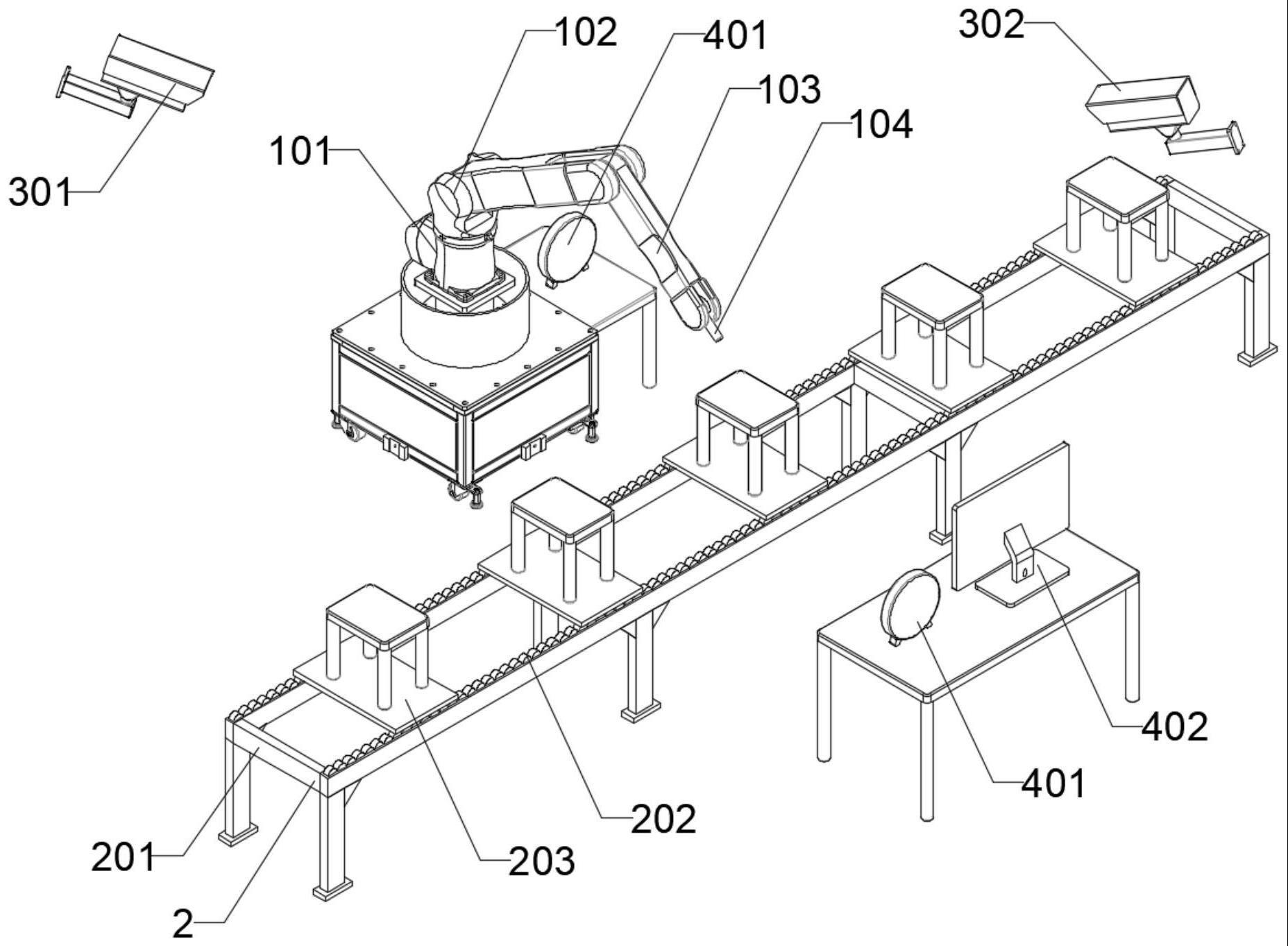
4、所述作业模块包括作业机器人1和工作台2,所述作业机器人1的一端安装在底座上,另一端对所述工作台2上的工件执行作业。
5、所述作业机器人1上设有信号发射单元,每次启动或完成指定作业,所述信号发射单元发射指定作业对应的作业通讯信号。
6、所述信号采集模块与所述信号发射单元通信连接,采集所述作业通讯信号。
7、所述监控模块采集作业机器人1作业时的监控视频画面。
8、所述处理模块分别连接所述信号采集模块和所述监控模块,接收所述监控视频画面和所述作业通讯信号,将所述作业通讯信号作为时间戳,插入所述监控视频画面中,得到时间戳监控视频。
9、所述分类存储模块连接所述处理模块,从所述处理模块接收所述时间戳监控视频,并按照指定作业类型和作业时间将所述时间戳监控视频分类存储。
10、在本实用新型较佳的实施例中,上述机器人作业监控系统还包括时间模块,所述时间模块采用时钟401或显示器402。
11、其技术效果在于:通过时钟401显示时间与日期等信息;通过显示器402显示工件名称、机器人工作状态、工件序号等信息。
12、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述时钟401或所述显示器402安装在所述作业机器人1执行作业的正前方,使所述监控模块能同时采集到所述作业机器人1执行作业时所述时钟401或所述显示器402上显示的时间。
13、其技术效果在于:监控视频画面中覆盖了时间模块与机器人的作业过程,且二者互相独立,并不存在任何电气上的关联。因此,通过时间模块可为整个系统提供背书,即确保监控视频没有经过造假或篡改,在一定程度上可作为具备一定法律效力的证据。
14、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述作业机器人1包括机器人本体101、电控装置102、执行机构104和末端工具夹持装置103。
15、所述电控装置102安装在所述机器人本体101上,通过所述末端工具夹持装置103连接所述执行机构104。
16、所述执行机构104对所述工作台2上的工件执行作业。
17、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述工作台2包括流水线承载结构201、传送链202、和若干作业工位203。
18、所述传送链202在所述流水线承载结构201上滚动。
19、每个所述作业工位203分别与所述传送链202上的卡扣装置卡合,依次沿所述传送链202移动。
20、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述信号发射单元采用plc信号发射器或网络路由器或蓝牙信号发射器。
21、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述监控模块包括机器人监控单元301和工作台2监控单元302。
22、所述机器人监控单元301安装在所述作业机器人1的上方,所述工作台2监控单元302安装在所述工作台2的上方。
23、其技术效果在于:使得监控同时拍摄到机器人作业全过程与钟表指示的时间与日期等信息,监控记录并保存到监控视频画面。
24、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述处理模块包括第一获取单元、第一确定单元。
25、所述第一获取单元获取所述监控视频画面中采集的指定作业的第一个视频帧和第一个作业通讯信号。
26、所述第一确定单元将第一个作业通讯信号插入所述监控视频画面中采集的指定作业的第一个视频帧。
27、其技术效果在于:需要调取机器人对第n件工件的作业视频时,直接通过时间戳即可查找到视频相应位置并播放。
28、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述分类存储模块包括分类单元、数据存储ram单元和分类数据输出单元。
29、所述分类单元将所述时间戳监控视频按照指定作业类型或者指定作业时间进行分类。
30、所述数据存储ram单元有若干存储区域,分别存储按照指定作业类型或者指定作业时间分类后的数据。
31、所述分类数据输出单元有若干输入端口和若干输出端口,若干所述存储区域分别对应连接若干所述输入端口,若干所述输出端口分别对应连接若干所述输入端口。
32、在本实用新型较佳的实施例中,上述机器人作业监控系统的所述分类存储模块接收接入工厂mes系统或工厂erp系统。
33、其技术效果在于:供用户随时快速调取监控视频。可以统计机器人作业时的生产数目,且非常便捷地实现有据可查。可用于机器人包工包料的自动计数计费。
34、本实用新型实施例的有益效果是:
35、本实用新型的机器人作业监控系统,将启动或完成指定作业的视频与时间戳相对应,可以自动统计机器人对应作业时间段的生产数目,且非常便捷地实现有据可查,减少供需双方的矛盾;可用于机器人包工包料作业的自动计数计费,实现数据自动统计。
技术特征:
1.一种机器人作业监控系统,其特征在于,包括作业模块、信号采集模块、监控模块、处理模块和分类存储模块;
2.根据权利要求1所述的机器人作业监控系统,其特征在于,还包括时间模块;
3.根据权利要求2所述的机器人作业监控系统,其特征在于,
4.根据权利要求1所述的机器人作业监控系统,其特征在于,所述作业机器人(1)包括机器人本体(101)、电控装置(102)、执行机构(104)和末端工具夹持装置(103);
5.根据权利要求1所述的机器人作业监控系统,其特征在于,所述工作台(2)包括流水线承载结构(201)、传送链(202)、和若干作业工位(203);
6.根据权利要求1所述的机器人作业监控系统,其特征在于,
7.根据权利要求1所述的机器人作业监控系统,其特征在于,
8.根据权利要求1所述的机器人作业监控系统,其特征在于,所述处理模块包括第一获取单元、第一确定单元;
9.根据权利要求1所述的机器人作业监控系统,其特征在于,所述分类存储模块包括分类单元、数据存储ram单元和分类数据输出单元;
10.根据权利要求1所述的机器人作业监控系统,其特征在于,
技术总结
本技术的实施例公开了一种机器人作业监控系统,包括作业模块、信号采集模块、监控模块、处理模块和存储模块;所述作业模块包括作业机器人和工作台;所述作业机器人上设有信号发射单元,每次启动或完成指定作业,所述信号发射单元发射指定作业对应的作业通讯信号;所述信号采集模块采集所述作业通讯信号;所述监控模块采集作业机器人作业时的监控视频画面;所述处理模块接收所述监控视频画面和所述作业通讯信号,将所述作业通讯信号作为时间戳,插入所述监控视频画面中,得到时间戳监控视频。本技术能够将启动或完成指定作业的视频与时间戳对应,自动统计机器人对应作业时间段的生产数目,且非常便捷,有据可查,减少供需双方的矛盾。
技术研发人员:王伟华,黄钰茗,杨欣雨
受保护的技术使用者:清能精控机器人技术(佛山)有限公司
技术研发日:20230307
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!