基于实时SLAM技术的设计图纸和航拍视频叠加显示方法和系统与流程
本发明涉及叠加显示,具体涉及基于实时slam技术的设计图纸和航拍视频叠加显示方法和系统。
背景技术:
1、航片视频以高空视角观察地面,以大市场俯瞰全局,常用于环境侦察和作业监测,以无人机航片视频为代表。设计图纸是一种平面线画图,产自cad、bim等软件,常用于作业前期的设计规划,广泛应用于土木建筑、城市规划、园林设计等领域。目前,两者是独立隔开的,没有产生关联,设计院按照cad图纸给施工人员布置施工任务,在施工进程中,监理人员通过飞机视频巡航(如无人机巡航)来监控作业进度,已有的技术无法实现道路设计图纸与航拍视频的结合,方案图纸与航拍实景跟踪不稳定。
技术实现思路
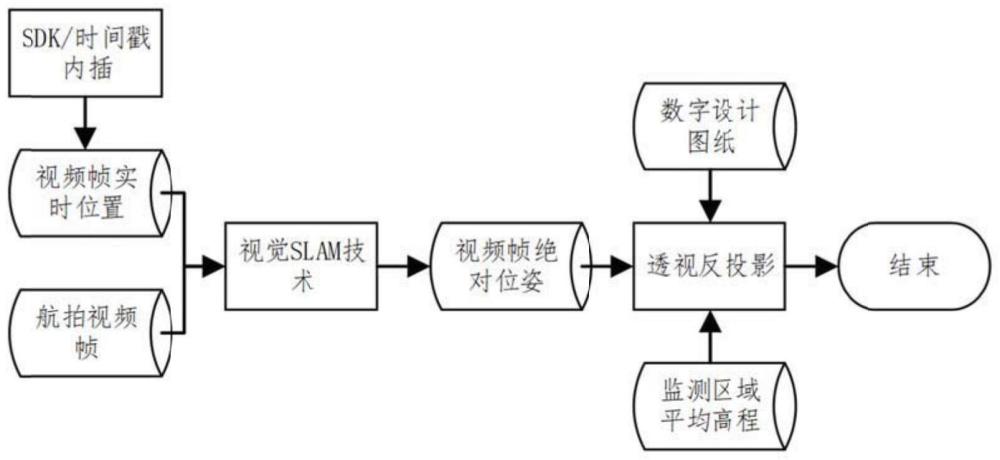
1、为了克服上述技术问题,本发明的技术方案为一种设计图纸和航拍视频的实时叠加显示方法,包括如下步骤:
2、步骤1,实时获取飞机的视频图像和视频帧的位置信息,逐视频帧,进行后续步骤2-步骤4;
3、步骤2,基于飞机的视频图像和视频帧的位置信息,采用视觉slam算法实时定位视频帧相对于大地坐标系的绝对坐标和绝对姿态角;
4、步骤3,导入带有大地坐标系下绝对坐标和高程信息的数字设计图纸,并将数字设计图纸转换至视频帧坐标系下;
5、步骤4,基于透视反投影技术,将设计图纸反投影到视频帧内,完成叠加显示。
6、进一步,步骤1中通过飞机厂商提供的sdk开发包实时获取飞机的视频图像和视频帧的位置信息,若位置信息是独立且按照固定时间间隔采集的,则与视频帧的时间戳对齐后,内插计算出视频帧的位置信息。
7、进一步,步骤2的具体实现方式如下;
8、2.1,通过视频帧的时间,将时间相邻的视频帧构建匹配对;
9、2.2,利用orb方法逐视频帧提取特征点,并与前一帧视频帧进行特征点匹配;
10、2.3,利用连接点进行单应/本质矩阵估计,并对其进行奇异值分解,计算匹配对的相对位姿,并利用影像gps计算初始绝对位姿;
11、2.4,以所有连接点作为观测,利用视频帧位置作为约束,以奇异值分解得到的位姿作为初始值,进行非线性优化,计算精确位姿参数。
12、进一步,设计图纸为dxf格式或shp格式或kml格式文件。
13、进一步,步骤3中将作业区域的平均高程作为设计图纸的高程信息。
14、进一步,反投影计算公式如下:
15、
16、其中,λ表示比例尺,u,v为视频帧内的图像坐标,fx,fy表示x方向与y方向上的焦距,u0和v0表示像主点位置,等号右侧第一个矩阵为视频采集相机的内参矩阵,通过飞机出场时的标定参数获取,或通过步骤2中所述slam算法获取;r,t为视频帧外参矩阵,通过步骤2所述slam算法获取,xw,yw,zw为设计图纸的绝对坐标,通过读取图纸信息获取。
17、本发明还提供基于实时slam技术的设计图纸和航拍视频叠加显示系统,包括如下模块:
18、信息获取模块,用于实时获取飞机的视频图像和视频帧的位置信息;
19、slam算法模块,用于基于飞机的视频图像和视频帧的位置信息,采用视觉slam算法实时定位视频帧相对于大地坐标系的绝对坐标和绝对姿态角;
20、坐标转换模块,用于导入带有大地坐标系下绝对坐标和高程信息的数字设计图纸,并将数字设计图纸转换至视频帧坐标系下;
21、显示模块,用于基于透视反投影技术,将设计图纸反投影到视频帧内,完成叠加显示。
22、进一步的,slam算法模块的具体实现方式如下;
23、2.1,通过视频帧的时间,将时间相邻的视频帧构建匹配对;
24、2.2,利用orb方法逐视频帧提取特征点,并与前一帧视频帧进行特征点匹配;
25、2.3,利用连接点进行单应/本质矩阵估计,并对其进行奇异值分解,计算匹配对的相对位姿,并利用影像gps计算初始绝对位姿;
26、2.4,以所有连接点作为观测,利用视频帧位置作为约束,以奇异值分解得到的位姿作为初始值,进行非线性优化,计算精确位姿参数。
27、进一步的,反投影计算公式如下:
28、
29、其中,λ表示比例尺,u,v为视频帧内的图像坐标,fx,fy表示x方向与y方向上的焦距,u0和v0表示像主点位置,等号右侧第一个矩阵为视频采集相机的内参矩阵,通过飞机出场时的标定参数获取,或通过slam算法模块中所述slam算法获取;r,t为视频帧外参矩阵,通过所述slam算法获取,xw,yw,zw为设计图纸的绝对坐标,通过读取图纸信息获取。
30、本发明提出一种设计图纸和航拍视频的实时叠加显示技术,让监理人员通过操作航空飞机(如小型无人机),实时观看地面视频和设计图纸叠加显示效果,直观的对比作业进度和设计图纸之间的差别,更清晰的管理作业进度和风险。
技术特征:
1.基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于:步骤1中通过飞机厂商提供的sdk开发包实时获取飞机的视频图像和视频帧的位置信息,若位置信息是独立且按照固定时间间隔采集的,则与视频帧的时间戳对齐后,内插计算出视频帧的位置信息。
3.如权利要求1所述的基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于:步骤2的具体实现方式如下;
4.如权利要求1所述的基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于:设计图纸为dxf格式或shp格式或kml格式文件。
5.如权利要求1所述的基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于:步骤3中将作业区域的平均高程作为设计图纸的高程信息。
6.如权利要求1所述的基于实时slam技术的设计图纸和航拍视频叠加显示方法,其特征在于:反投影计算公式如下:
7.基于实时slam技术的设计图纸和航拍视频叠加显示系统,其特征在于,包括如下模块:
8.如权利要求7所示的基于实时slam技术的设计图纸和航拍视频叠加显示系统,其特征在于:slam算法模块的具体实现方式如下;
9.如权利要求7所示的基于实时slam技术的设计图纸和航拍视频叠加显示系统,其特征在于:反投影计算公式如下:
技术总结
近年来,无人机被广泛用于工程施工的各个阶段。尤其在工程施工监测过程中,监理人员按照工程设计图纸,通过飞机视频巡航(如无人机巡航)来监控作业进度。但是由于工程设计图纸与无人机航拍视频相互独立,要求监理人员需要很强的专业素养与工程经验。为此,本发明提出一种基于实时SLAM技术的设计图纸和航拍视频叠加显示方法和系统,让监理人员通过操作航空飞机(如小型无人机),实时观看地面视频和设计图纸叠加显示效果,直观的对比作业进度和设计图纸之间的差别,更清晰的管理作业进度和风险。
技术研发人员:李迎松,宋孟肖,刘昆波,万炎炎
受保护的技术使用者:北京图知科技有限公司武汉分公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!