一种运动路径光照强度补足方法与流程
本发明涉及光照强度补足,具体为一种运动路径光照强度补足方法。
背景技术:
1、智能驾驶本质上涉及注意力吸引和注意力分散的认知工程学,主要包括网络导航、自主驾驶和人工干预三个环节。智能驾驶的前提条件是,我们选用的车辆满足行车的动力学要求,车上的传感器能获得相关视听觉信号和信息,并通过认知计算控制相应的随动系统。
2、智能驾驶的网络导航,解决我们在哪里、到哪里、走哪条道路中的哪条车道等问题;自主驾驶是在智能系统控制下,完成车道保持、超车并道、红灯停绿灯行、灯语笛语交互等驾驶行为;人工干预,就是说驾驶员在智能系统的一系列提示下,对实际的道路情况做出相应的反应。
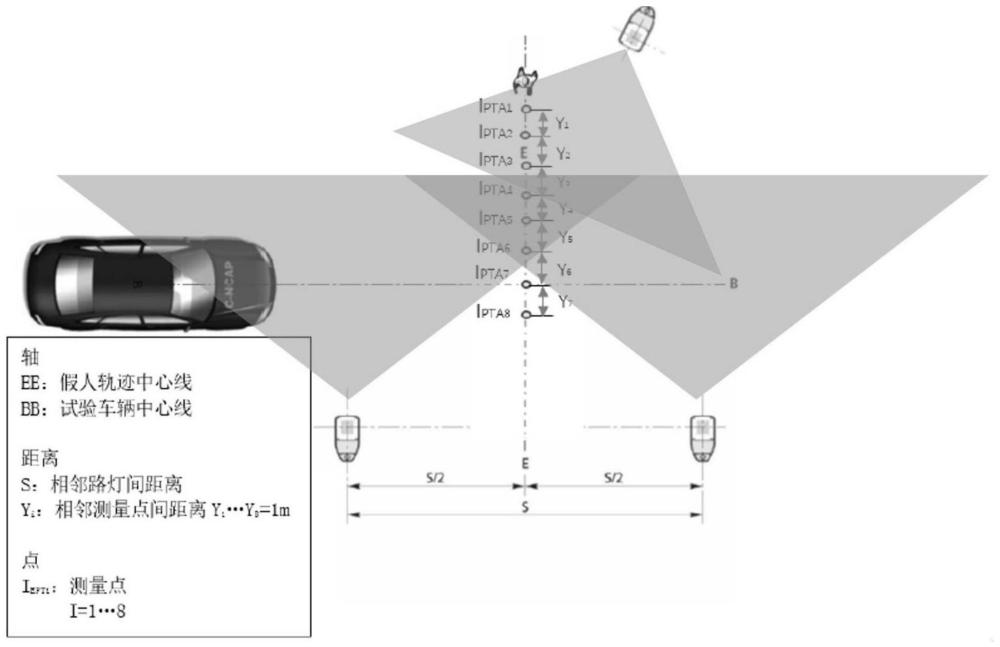
3、在智能驾驶系统使用前,需要对智能驾驶系统全面测试,如对行人识别及避让,则需要对行人的行走路径识别和判断,以便控制车辆的行驶路径调整,在夜间夜间测试智能车辆驾驶系统时,由于夜间光线不足,虽然有路灯等光照,但是光线较暗,存在大量的盲点。
技术实现思路
1、本发明的目的在于提供一种运动路径光照强度补足方法,以解决上述背景技术中提出的在智能驾驶系统使用前,需要对智能驾驶系统全面测试,如对行人识别及避让,则需要对行人的行走路径识别和判断,以便控制车辆的行驶路径调整,在夜间夜间测试智能车辆驾驶系统时,由于夜间光线不足,虽然有路灯等光照,但是光线较暗,存在大量的盲点的问题。
2、为实现上述目的,本发明提供如下技术方案:一种运动路径光照强度补足方法,该运动路径光照强度补方法的具体步骤如下:
3、s1:设定一个摄像头,摄像头安装在车辆的外部,另一个摄像头位于车辆内部,且车辆外部的摄像头为实物采集摄像头,车辆内部的摄像头为内识别摄像头,实物采集摄像头采集的真实界面视频数据通过can总线传输至视频播放端,视频播放端对实物采集摄像头采集的真实界面视频数据进行播放,内识别摄像头对视频播放端播放的视频识别;
4、s2:对实物采集摄像头、内识别摄像头开机;
5、实物采集摄像头对真实界面采集,得到真实界面视频数据,内识别摄像头对视频播放端播放的视频识别;
6、s3:内识别摄像头对视频播放端播放的视频判断是否达到亮度需求:
7、当内识别摄像头判断视频播放端播放的视频判断达到亮度需求,则不做处理;
8、当内识别摄像头判断视频播放端播放的视频判断未达到亮度需求,则提醒架设补光灯。
9、优选的,所述视频播放端播放的视频各个点亮度>5lux时,即达到亮度需求,视频播放端播放的视频存在点亮度≤5lux时,即未达到亮度需求。
10、优选的,所述步骤s3中,补光灯朝向视频播放端播放的视频未达到亮度需求的点处。
11、与现有技术相比,本发明的有益效果是:
12、通过内识别摄像头对视频播放端播放的视频进行识别,判断视频上的画面亮度是否达到亮度需求,对于未达到亮度需求的地方记录,后续在真实界面中,对未达到亮度需求的地方进行补光,还可以通过软件曝光处理的方式,对未达到亮度需求的地方进行画面补光。
技术特征:
1.一种运动路径光照强度补足方法,其特征在于,该运动路径光照强度补方法的具体步骤如下:
2.根据权利要求1所述的一种使用多机位摄像头来确定视频信号延迟的方法,其特征在于:所述视频播放端播放的视频各个点亮度>5lux时,即达到亮度需求,视频播放端播放的视频存在点亮度≤5lux时,即未达到亮度需求。
3.根据权利要求1所述的一种使用多机位摄像头来确定视频信号延迟的方法,其特征在于:所述步骤s3中,补光灯朝向视频播放端播放的视频未达到亮度需求的点处。
技术总结
本发明属于光照强度补足技术领域,具体为一种运动路径光照强度补足方法,该运动路径光照强度补方法的具体步骤如下:S1:设定一个摄像头,摄像头安装在车辆的外部,另一个摄像头位于车辆内部,且车辆外部的摄像头为实物采集摄像头,车辆内部的摄像头为内识别摄像头;S2:实物采集摄像头对真实界面采集,内识别摄像头对视频播放端播放的视频识别;S3:内识别摄像头对视频播放端播放的视频判断是否达到亮度需求。通过内识别摄像头对视频播放端播放的视频进行识别,对于未达到亮度需求的地方记录,后续在真实界面中,对未达到亮度需求的地方进行补光,还可以通过软件曝光处理的方式,对未达到亮度需求的地方进行画面补光。
技术研发人员:李晓英,罗易,金月飞
受保护的技术使用者:浙江测迅汽车科技有限公司
技术研发日:
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!