复杂电磁环境下多无人机协作集划分与部署办法的制作方法
本发明属于无线通信,应用于无人机集群依据受干扰用户位置情况来进行协作集划分与三维位置部署的过程中,具体为复杂电磁环境下多无人机协作集划分与部署办法。
背景技术:
1、无人机具有移动性、稳定性和广覆盖性等优势,能够动态快速地调整自身位置,并通过多点协同传输方式,为终端提供可靠的通信服务,因此被广泛应用于军事及民用领域。然而,由于无人机无线传输的广播特性以及直视链路特性,其传输信息容易受到恶意电磁干扰,信息传输安全便遭到严重破坏;外部复杂的电磁干扰与内部不同信道终端之间的干扰,是制约频率复用架构下广域覆盖无人机空地通信容量增长的关键因素。
2、目前,无人机因其体积小、设备小,所能搭载的资源较少的特点,一旦受到外界的无差别全频强功率干扰,无法像地面基站一样做出复杂的处理技术,如扩频与跳频技术,来对抗相关干扰。因此,通过多架无人机相互协作,增强受扰节点接收信干噪比,提升通信质量,可保障通信的可靠性。协作集的划分是影响通信质量的一个重要因素,然而现有的协作技术只针对固定基站方式进行了相关研究,对于含有动态特性的无人机之间的协作部署方案尚缺乏考量。
3、现有技术已介绍了多架定向天线无人机作为无线基站,为地面用户提供覆盖的有效部署方案,提出了多架无人机的最佳3d部署方式,解决以最小发射功率最大化下行覆盖性能的问题。现有技术还介绍了一种分布式的多点协作传输方法,该方法可接近于集中式多点协作传输的性能,且具有计算高效的优点。
4、现有技术中公开了一种针对中小型无人机的uqpsk的数据链系统,其能够提高无人机与地面通信的抗干扰性能,提高了数据传输的可靠性;然而该技术在无人机上做了相对复杂的信号处理,浪费了较多的功率,削减了无人机自身应有的优势。从所有公开介绍的现有技术可知,其仅关注了固定基站,基于无人机可移动性的协作集划分与无人机位置部署的相关方案均缺乏研究,这也相应成为本领域技术人员的研究要点。
技术实现思路
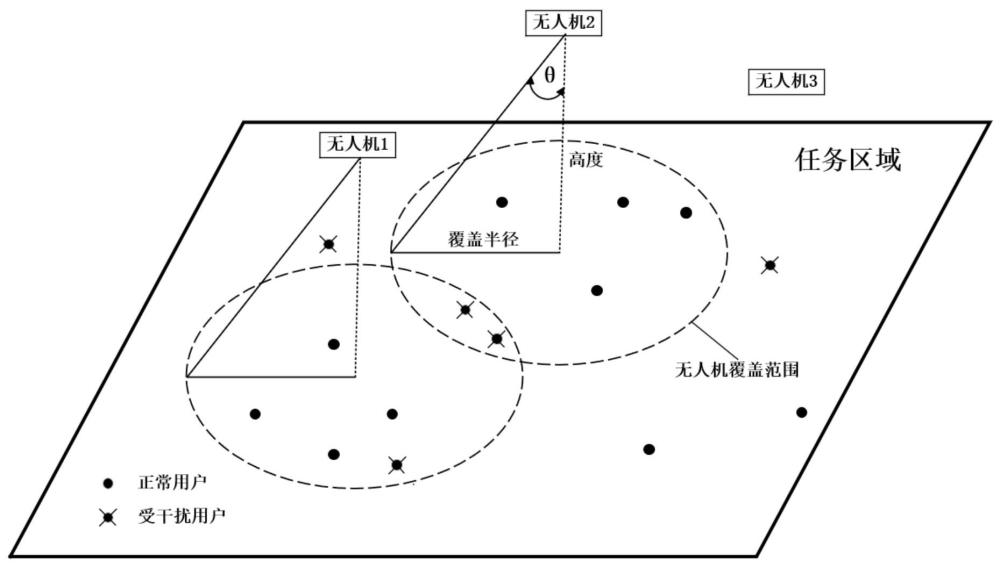
1、基于背景技术中的现状,本发明的目的是解决无人机集群在作为基站与地面用户通信时,如何对抗外界恶意干扰的办法;本发明在复杂电磁环境下,能够保证并显著提升受外界干扰用户的信干噪比,并针对所有用户,建立起基于受干扰严重用户的协作集划分与无人机集群位置部署方案。
2、本发明采用了以下技术方案来实现目的:
3、一种复杂电磁环境下多无人机协作集划分与部署办法,所述办法包括如下步骤:
4、s1、构建系统模型,依据系统模型进行具有动态特性的多无人机基站之间协作部署的方案设计与计算;
5、s2、依据系统模型中所有用户的初始位置,采用k-means++聚类算法,对多无人机的位置坐标进行初始化;
6、s3、依据系统模型中受干扰用户的位置,通过设置距离阈值的方式,对多无人机的协作集进行初次划分,得出多个初始协作集;
7、s4、计算每个初始协作集的权重,通过权重大小排序的方式,选取出不重叠的最终协作集,作为多无人机协作集划分结果;
8、s5、依据多无人机协作集划分结果,固定最终协作集中的用户标签,再次采用k-means++聚类算法,并以循环遍历方式完成聚类过程,更新多无人机的位置坐标,完成多无人机位置部署。
9、进一步的,步骤s1中,构建系统模型时,确定系统模型中的无人机基础参数和用户基础参数,并在确定完成后,令所有无人机采用同频率的发射信号,且无人机与用户之间通信的信道为瑞利信道;在确定无人机与对应用户之间的信道衰落后,完成系统模型的构建。
10、进一步的,步骤s2中,对多无人机的位置坐标进行初始化,包括如下步骤:
11、s21、采用k-means++聚类算法,选择初始的聚类中心;
12、s22、进行聚类过程,初始化聚类中心的二维位置,并计算聚类中心的高度;
13、s23、将聚类中心扩展至三维空间后,再进行一次同步骤s22的聚类过程,并更新聚类中心的二维位置坐标与高度坐标;
14、s24、通过多次循环聚类过程,将用户的聚类标签更新为对应的聚类中心;当聚类标签随更新不再变化时,停止循环,当前聚类中心即为对应无人机的三维位置坐标,否则返回步骤s23再次进行聚类过程。
15、进一步的,步骤s3中,针对受干扰用户划分协作集,随机选取受干扰用户,记录服务该用户的无人机,并采用两架相邻无人机组成该用户对应的初始协作集。
16、进一步的,步骤s4中,在确定出的多个初始协作集中,将具有相同初始协作集的用户归为一类,得到处于无人机不重叠状态下的所有初始协作集,以及这些协作集中对应的用户;
17、选取无人机不重叠状态下的最终协作集;通过计算每个归类后的初始协作集的权重,按照权重进行排序后,从大到小依次选取;当任意协作集被选取后,将含有此协作集中无人机的其余协作集丢弃,由此得出多无人机协作集划分结果。
18、进一步的,步骤s5中,首先获取步骤s2中的聚类中心与用户的聚类标签,再依据步骤s4中的多无人机协作集划分结果,更新一次聚类中心的坐标值,再进入循环以进行聚类过程;
19、循环聚类过程中,首先遍历每个用户,如果当前用户已为协作集用户,则跳过;否则遍历聚类中心,计算当前用户与各个聚类中心的距离,选取距离当前用户最近的聚类中心,并将当前用户归为该聚类中心的类中;此时再次更新聚类中心的三轴坐标值,如果对应聚类标签没有变化,则当前聚类中心的三维位置坐标即为对应无人机的三维位置坐标,否则重复循环聚类过程。
20、综上所述,由于采用了本技术方案,本发明的有益效果如下:
21、本发明办法能够依据用户的位置变化以及受干扰情况变化,动态调整无人机集群的协作集划分方案,从而尽可能的保证所有用户都能够接收到良好的信号。通过本发明办法的应用,在复杂电磁环境下,能够显著提升受外界干扰用户的信干噪比,顺利建立起针对所有用户的多无人机协作集划分与部署方案,提供稳定可靠的通信服务。
技术特征:
1.一种复杂电磁环境下多无人机协作集划分与部署办法,其特征在于,所述办法包括如下步骤:
2.根据权利要求1所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s1中,构建系统模型时,确定系统模型中的无人机基础参数和用户基础参数,方式如下:
3.根据权利要求2所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:无人机基础参数和用户基础参数确定完成后,令所有无人机采用同频率的发射信号,并将发射信号的载波频率记为,带宽记为;将单架无人机的总功率记为,并令无人机与用户之间通信的信道为瑞利信道;
4.根据权利要求3所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:将第架无人机与其服务的第个用户之间的距离记为,将单位距离的信道衰落记为,则第架无人机与其服务的第个用户之间的信道衰落如下式:
5.根据权利要求2所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s2中,对多无人机的位置坐标进行初始化,包括如下步骤:
6.根据权利要求5所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s21中,对应于总计有架的无人机,从样本点中逐个选取个聚类中心,且距离其余聚类中心越远的样本点被选为下一个聚类中心的概率越高,方式如下:
7.根据权利要求6所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s22中,对于第架无人机,若第个用户的位置坐标与第个聚类中心的位置坐标的距离最短,如下式:
8.根据权利要求7所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s3中,针对受干扰用户划分协作集,随机选取受干扰用户并记为,将服务该用户的无人机记为,采用两架无人机组成协作集;
9.根据权利要求8所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s4中,在确定出的多个初始协作集中,将具有相同初始协作集的用户归为一类,得到处于无人机不重叠状态下的所有初始协作集,以及这些协作集中对应的用户;
10.根据权利要求9所述的复杂电磁环境下多无人机协作集划分与部署办法,其特征在于:步骤s5中,首先获取步骤s2中的聚类中心与用户的聚类标签,再依据步骤s4中的多无人机协作集划分结果,将协作集中用户的聚类标签进行更改,令其同时含有协作集中两架无人机的标签;
技术总结
本发明提供复杂电磁环境下多无人机协作集划分与部署办法,属于无线通信技术领域;办法包括:S1、构建系统模型,设计并计算协作部署方案;S2、依据用户初始位置,采用K‑means++聚类算法,对多无人机的位置坐标进行初始化;S3、对多无人机的协作集进行初次划分,得出初始协作集;S4、计算初始协作集的权重,通过权重大小排序选取出不重叠的最终协作集,作为划分结果;S5、固定最终协作集中的用户标签,再次采用同样的聚类算法,以循环遍历方式进行聚类,更新多无人机的位置坐标,完成部署;本发明能在复杂电磁环境下尽可能的保证所有用户都接收到良好信号,显著提升受外界干扰用户的信干噪比,提供稳定可靠的通信服务。
技术研发人员:王翔,罗皓,吴麒,魏浩然,李刚,乔冠华,陈杨
受保护的技术使用者:中国电子科技集团公司第十研究所
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!