一种船载摄像头的波浪运动补偿装置的制作方法
本发明属于机器人感知,涉及一种船载摄像头的波浪运动补偿装置。
背景技术:
1、海洋占地球大部分的面积,其中蕴含着丰富的石油、天然气等自然资源。无人帆船作为一种以风能海洋环境为驱动动力的新型海洋机器人,可以对海上环境经行长时间的自主连续观测,为全球气候变化、海洋环流等前沿问题提供数据支撑。传统的船舶乃至无人船舶大多是电力推进或者是依靠化石能源燃烧产生的热能推进,存在着续航时间短、能量消耗大等的不足,在执行任务时必须精确考虑任务的时长以及航线距离。无人帆船由于动力方面是使用依靠自然风的帆,因此,与传统的无人船相比,在降低部署和应用成本的同时还兼顾了绿色环保,降低了污染。无人帆船的续航时间可以达到数周甚至数月,在作业海区能够保持半永久性存在,可以替代传统无人船舶或者系泊浮标实现对定点区域的数据采集。
2、无人帆船在规定水域进行监测或者巡逻任务时,需要避开一些已知障碍物、禁行区域以及未知障碍物。由于其特殊的工作环境和工作内容,因此需要对其感知系统的采集的准确性、稳定性提出高要求。在地面上的无人驾驶领域,一般使用摄像头以及雷达等传感器来对周围的环境来进行感知识别避障,但是与平稳的路面环境不同,由于海洋环境的特殊性,水面的不平稳与海上大风的存在,会导致无人帆船出现上下左右的倾斜摇晃,使用摄像头来感知周围的障碍物时画面会严重晃动,船体摇晃幅度过大甚至可能出现摄像头看不到画面的情况 。
技术实现思路
1、为了解决现有技术中存在的上述技术问题,本发明提出了一种应用于无人帆船的船载摄像头的波浪运动补偿装置,能够使无人帆船在海面上能够稳定、准确的通过船载摄像头采集到视觉环境信息,其具体技术方案如下:
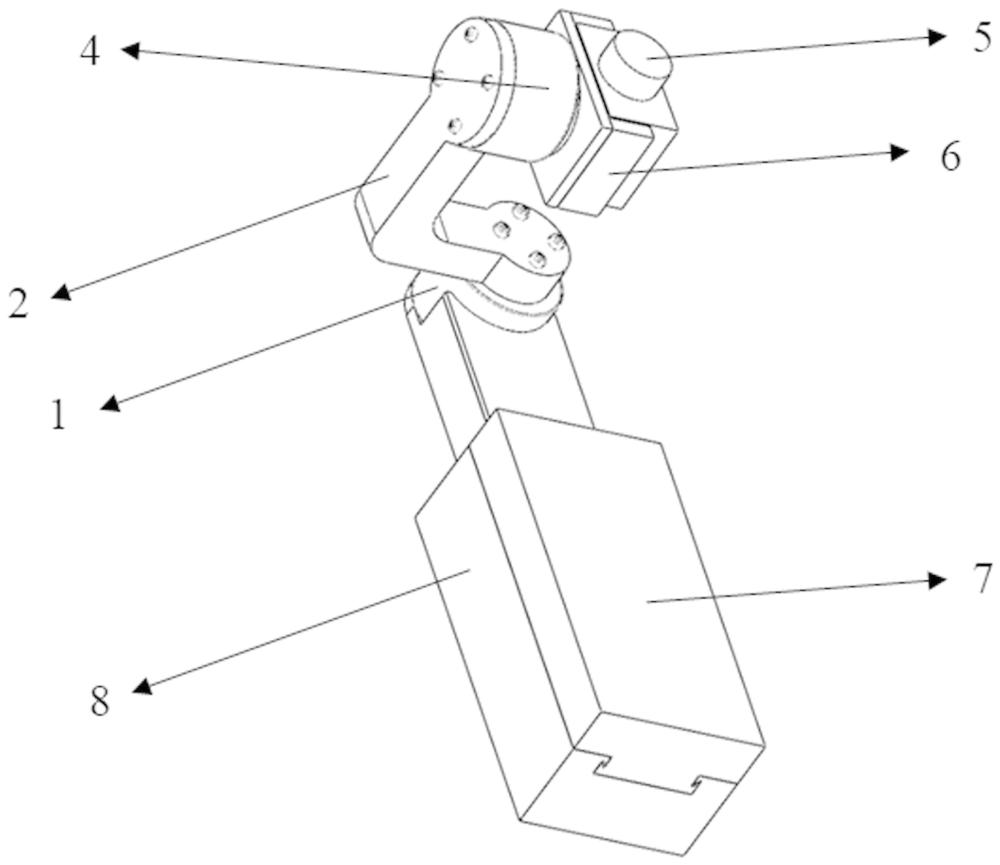
2、一种船载摄像头的波浪运动补偿装置,包括云台控制器及其控制连接的云台,船载摄像头安装在所述云台上,所述云台控制器包括云台连接壳体和设置在云台连接壳体内的电子控制处理模块,其特征在于,所述云台包括呈l型的云台电机连接支架以及分别安装在云台电机连接支架头尾两部的云台俯仰电机和云台横滚电机,所述云台横滚电机和云台俯仰电机均由电子控制处理模块通过信号线控制连接,且所述云台横滚电机固定在云台连接壳体上,云台俯仰电机转动控制船载摄像头,所述电子控制处理模块的软件程序中配置存储有波浪补偿算法,所述波浪补偿算法用以对船载摄像头的运行进行预测和矫正。
3、进一步的,所述云台俯仰电机底座通过螺栓紧固连接在云台电机连接支架头部,云台俯仰电机的顶部转动轴上安装连接有摄像头夹具固定件,摄像头夹具固定件上通过螺栓紧固连接有摄像头俯仰电机夹具,所述摄像头俯仰电机夹具固定夹持所述船载摄像头。
4、进一步的,所述摄像头俯仰电机夹具的夹爪侧开有固定孔,所述船载摄像头由夹爪夹持后通过与固定孔连接的紧固螺钉进行紧定。
5、进一步的,所述云台电机连接支架采用中空结构,将连接云台俯仰电机的信号线埋设在所述中空结构内。
6、进一步的,所述云台连接壳体包括壳体主体和壳体背板,所述壳体主体和壳体背板通过推拉锁扣的方式紧密组装。
7、进一步的,所述壳体主体上半部分设有锁孔,壳体背板上设有与锁孔11相对应的锁扣,壳体主体底部设有卡口,在壳体背板底部设有与所述卡口对应的卡扣,将卡扣滑动嵌入卡口的同时,所述锁孔与锁扣相互配合连接。
8、进一步的,所述壳体主体顶部开设有缺口,所述云台横滚电机通过螺栓安装在该缺口处,所述壳体背板顶部则设有与云台横滚电机外壳适配的凹口。
9、进一步的,所述电子控制处理单元包括可充电锂电池、电控处理单元电路板和惯性测量单元电路板,所述可充电锂电池用于供电,所述电控处理单元电路板与惯性测量单元电路板之间设置连接有惯性测量单元数据连接线,惯性测量单元电路板与云台之间设置连接有云台控制线。
10、进一步的,所述电控处理单元电路板上设有微控制处理芯片,所述微控制处理芯片负责数据处理、运动预测、控制信号输出,所述运动预测通过所述波浪补偿算法实现,所述惯性测量单元电路板提供惯性测量单元数据至微控制处理芯片进行处理,数据包括装置的姿态数据。
11、进一步的,所述波浪补偿算法是根据波浪的运动无法突变的原理,通过姿态数据分析出过往的波浪运动数据,采用一个预测器预测随后的波浪变化,并根据预测结果使用云台横滚电机和云台俯仰电机对船载摄像头进行提前控制。
12、本发明具有以下有益效果:
13、本发明的装置适用于海面环境需求,能够实现船载摄像头在海面上的稳定,而且结构紧凑、体积小、电子系统功耗低,整个系统独立程度高,可以单独且方便的进行安装与拆卸,便于安装于无人帆船之上,且不会对船体其他部分产生任何影响;本发明所使用的云台控制器成本更低,能够批量化生产,相比于目前常见的手持云台,针对海上的特殊情况,改进陆地上的云台结构,增加横滚方向上的稳定性,并且搭配波浪补偿算法,能够根据波浪造成的船体摄像头的摇晃,及时地预测摄像头的摇摆方向,通过云台进行先一步的调整,使得船载摄像头在海上大波浪的情况下也能稳定地进行工作。
技术特征:
1.一种船载摄像头的波浪运动补偿装置,包括云台控制器及其控制连接的云台,船载摄像头(6)安装在所述云台上,所述云台控制器包括云台连接壳体和设置在云台连接壳体内的电子控制处理模块,其特征在于,所述云台包括呈l型的云台电机连接支架(2)以及分别安装在云台电机连接支架(2)头尾两部的云台俯仰电机(4)和云台横滚电机(1),所述云台横滚电机(1)和云台俯仰电机(4)均由电子控制处理模块通过信号线控制连接,且所述云台横滚电机(1)固定在云台连接壳体上,云台俯仰电机(4)转动控制船载摄像头(6),所述电子控制处理模块的软件程序中配置存储有波浪补偿算法,所述波浪补偿算法用以对船载摄像头(6)的运行进行预测和矫正。
2.如权利要求1所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述云台俯仰电机(4)底座通过螺栓紧固连接在云台电机连接支架(2)头部,云台俯仰电机(4)的顶部转动轴上安装连接有摄像头夹具固定件(3),摄像头夹具固定件(3)上通过螺栓紧固连接有摄像头俯仰电机夹具(5),所述摄像头俯仰电机夹具(5)固定夹持所述船载摄像头(6)。
3.如权利要求2所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述摄像头俯仰电机夹具(5)的夹爪侧开有固定孔,所述船载摄像头(6)由夹爪夹持后通过与固定孔连接的紧固螺钉进行紧定。
4.如权利要求1所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述云台电机连接支架(2)采用中空结构,将连接云台俯仰电机(4)的信号线埋设在所述中空结构内。
5.如权利要求1所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述云台连接壳体包括壳体主体(8)和壳体背板(7),所述壳体主体(8)和壳体背板(7)通过推拉锁扣的方式紧密组装。
6.如权利要求5所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述壳体主体(8)上半部分设有锁孔(11),壳体背板(7)上设有与锁孔(11)相对应的锁扣(14),壳体主体(8)底部设有卡口,在壳体背板(7)底部设有与所述卡口对应的卡扣,将卡扣滑动嵌入卡口的同时,所述锁孔(11)与锁扣(14)相互配合连接。
7.如权利要求5所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述壳体主体(8)顶部开设有缺口,所述云台横滚电机(1)通过螺栓安装在该缺口处,所述壳体背板(7)顶部则设有与云台横滚电机(1)外壳适配的凹口。
8.如权利要求1所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述电子控制处理单元包括可充电锂电池、电控处理单元电路板(9)和惯性测量单元电路板(10),所述可充电锂电池用于供电,所述电控处理单元电路板(9)与惯性测量单元电路板(10)之间设置连接有惯性测量单元数据连接线(13),惯性测量单元电路板(10)与云台之间设置连接有云台控制线(12)。
9.如权利要求8所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述电控处理单元电路板(9)上设有微控制处理芯片,所述微控制处理芯片负责数据处理、运动预测、控制信号输出,所述运动预测通过所述波浪补偿算法实现,所述惯性测量单元电路板(10)提供惯性测量单元数据至微控制处理芯片进行处理,数据包括装置的姿态数据。
10.如权利要求9所述的一种船载摄像头的波浪运动补偿装置,其特征在于,所述波浪补偿算法是根据波浪的运动无法突变的原理,通过姿态数据分析出过往的波浪运动数据,采用一个预测器预测随后的波浪变化,并根据预测结果使用云台横滚电机(1)和云台俯仰电机(4)对船载摄像头(6)进行提前控制。
技术总结
本发明属于机器人感知技术领域,涉及一种船载摄像头的波浪运动补偿装置,包括云台控制器及其控制连接的云台,所述云台控制器包括云台连接壳体和设置在云台连接壳体内的电子控制处理模块,所述云台包括呈L型的云台电机连接支架以及分别安装在云台电机连接支架头尾两部的云台俯仰电机和云台横滚电机,所述云台横滚电机和云台俯仰电机均由电子控制处理模块通过信号线控制连接,且所述云台横滚电机固定在云台连接壳体上,云台俯仰电机转动控制船载摄像头,所述电子控制处理模块的软件程序中配置存储有波浪补偿算法,所述波浪补偿算法用以对船载摄像头的运行进行预测和矫正。本发明结构紧凑、体积小、功耗低,能够实现船载摄像头在海面上的稳定摄像。
技术研发人员:王滔,李能耀,刘硕,蔡勇
受保护的技术使用者:余姚市机器人研究中心
技术研发日:
技术公布日:2024/5/12
- 还没有人留言评论。精彩留言会获得点赞!