一种无人机中继网络抗干扰方法及无人机中继网络系统与流程
本发明涉及一种无人机中继网络抗干扰方法及无人机中继网络系统,属于无线通信。
背景技术:
1、近年来,随着科技的不断发展,无人机在民用、商用和军用领域都得到了广泛的应用,涵盖了灾难救援、边远地区通信、移动通信支持、特殊事件通信、农业与环境监测以及无线电视和互联网各种场景。
2、无人机中继通信中,干扰是一个很重要的问题,可能会对通信性能和可靠性产生负面的影响。无人机中继通信系统中的无线电设备、天线、电源组件可能会产生自身干扰,干扰无人机内部的通信系统或者其他设备,可能会导致信号衰减、数据丢失或者通信中断。当多个无人机同时工作时,它们的通信信号可能相互干扰,导致通信链路质量下降。特别是当无人机之间的距离很近时,相邻无人机的信号可能会干扰到彼此。在有人为操作的情况下,恶意干扰者可能会故意发送无线电信号或者干扰无人机通信系统,进而阻碍无人机的通信,可能会导致通信中断、数据损坏或者无法正常操作无人机。无人机通信也会受到环境条件的影响,例如电磁噪声、天气条件和地形影响,可能会导致信号衰减、多径效应或者频率选择性衰落,进而降低了通信质量。因此如何解决干扰,成为迫切需要解决的问题。
3、干扰对齐技术是解决干扰问题的有力工具。近年来,干扰对齐技术逐渐成为干扰管理技术的研究热点。一方面,干扰对齐技术对发射信号进行预编码使干扰在接收端重叠,通过分离信号子空间和有用信号空间使系统能够无干扰地传输信号,从而能够有效地弱化干扰和提升系统容量;另一方面,当系统网络存在外部干扰的情况时,会对现有的干扰对齐网络造成严重的干扰。
4、例如授权公告号为cn108683442b的中国专利文件公开了一种基于干扰对齐的无人机通信系统的能量效率优化方法,首先分析系统模型和其可行条件,然后利用干扰对齐算法求解出编码、解码矩阵,最后利用天线选择和功率分割的融合算法对无人机通信系统中的能量问题优化求解,从而达到优化无人机通信系统性能的目的。但是该能量效率优化方法在存在外部恶意干扰时抗干扰性能较差、不能很好地起到抗干扰作用。泄漏
技术实现思路
1、本发明的目的是提供一种无人机中继网络抗干扰方法及无人机中继网络系统,用于解决现有技术中在存在外部恶意干扰时抗干扰性能较差、不能很好地起到抗干扰作用的问题。
2、为实现上述目的,本发明提供的技术方案是:
3、本发明提供了一种无人机中继网络抗干扰方法,该抗干扰方法包括以下步骤:
4、1)根据无人机通信系统模型、外部干扰信号建立无人机的干扰泄漏模型,包括无人机中继和接收端的干扰泄漏模型以及无人机中继和发送端的干扰泄漏模型;
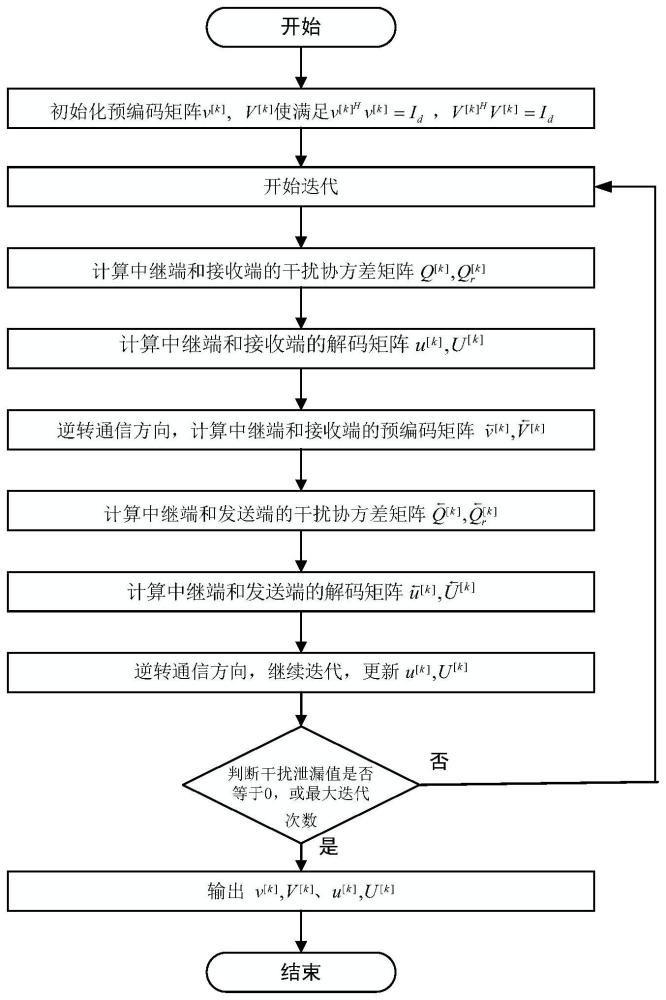
5、2)基于干扰对齐技术求解步骤1)中无人机的干扰泄漏模型,使无人机中继的干扰泄漏能量值、接收端的干扰泄漏能量值和发送端的干扰泄漏能量值减小到0或达到最大迭代次数,以此得到无人机中继和发送端的编码矩阵以及无人机中继和接收端的解码矩阵;
6、3)基于步骤2)得到的编码矩阵和解码矩阵进行无人机信号的传输。
7、进一步地,建立的干扰泄漏模型为:
8、
9、
10、
11、
12、
13、
14、
15、
16、其中,ir[k]为第k个无人机中继的干扰泄漏能量值,u[k]为无人机中继的解码矩阵,当i=k时,v[i]为非干扰发送端的预编码矩阵和解码矩阵,当i≠k时,v[i]为干扰发送端的预编码矩阵和解码矩阵,i和k均为自然数,qr[k]为第k个无人机中继的干扰协方差矩阵,h[ki]为第i个无人机中继和第k个基站之间的信道系数矩阵,为第i个无人机中继和第k个基站之间的信道系数矩阵的转置矩阵,i[k]为第k个无人机接收端的干扰泄漏能量值,q[k]为第k个无人机接收端的干扰协方差矩阵,u[k]为无人机接收端的解码矩阵,当i=k时,v[i]为非干扰发送端的预编码矩阵和解码矩阵,当i≠k时,v[i]为干扰发送端的预编码矩阵和解码矩阵,i和k均为自然数,为干扰者和第k个用户之间的信道矩阵,为干扰者和第k个用户之间的信道矩阵的转置矩阵,为无人机中继的反向干扰泄漏能量值,为无人机中继的反向干扰协方差矩阵,为发送端的反向干扰泄漏能量值,为发送端的反向干扰协方差矩阵,为传输功率,为传输功率,pj为干扰信号功率,d为用户的自由度,d[ki]为第i个接收端和第k个无人机中继之间的信道系数矩阵,tr为计算对应矩阵的迹。
17、进一步地,该抗干扰方法还包括以传输容量最大为目标对用户进行传输功率分配。
18、进一步地,在对传输功率进行分配时构建的目标函数的表达式为:
19、
20、
21、pt[i]≥0,i=1,2,3,…,k
22、其中,k为用户对的数量,为总功率,pt[i]为非干扰接收端的功率分配矩阵,pt[l]为干扰接收端的功率分配矩阵,s.t.为约束条件,σ2为方差,h[kl]为发送端到接收端的等效信道传输矩阵,当l=k时,h[kk]为非干扰接收端的等效信道传输矩阵,当l≠k时,h[kk]为干扰接收端的等效信道传输矩阵,l和k均为自然数;
23、h[kl]的计算公式为:
24、
25、其中,为无人机接收端k解码矩阵第j行,h[kl]为发送端l到无人机接收端k的传输矩阵,为发送端l预编码矩阵第i列。
26、进一步地,所述目标函数采用拉格朗日乘子法进行求解。
27、进一步地,在对目标函数采用拉格朗日乘子法进行求解时构建的函数的表达式为:
28、
29、其中,l(pt[i],μk)为pt[i]的一阶偏导数,为总功率,pt[i]为功率分配矩阵,σ2为方差。
30、有益效果:本发明属于改进型发明,本发明提出的无人机中继网络抗干扰方法,相较于现有的无人机中继网络抗干扰方法,根据无人机通信系统模型、外部干扰信号建立无人机的干扰泄漏模型,基于干扰对齐技术求解无人机的干扰泄漏模型,使无人机中继的干扰泄漏能量值、接收端的干扰泄漏能量值和发送端的干扰泄漏能量值减小到0或达到最大迭代次数,以此得到无人机中继和发送端的编码矩阵以及无人机中继和接收端的解码矩阵。可见本发明在求解编码矩阵和解码矩阵时考虑了外部干扰信号的影响因素,有效地解决了现有技术中在存在外部恶意干扰时抗干扰性能较差、不能很好地起到抗干扰作用的问题。
31、为解决上述技术问题,本发明还提供了一种无人机中继网络系统,包括无人机中继、接收端和发送端,该系统采用上述介绍的无人机中继网络抗干扰方法进行信息传输。
技术特征:
1.一种无人机中继网络抗干扰方法,其特征在于,该抗干扰方法包括以下步骤:
2.根据权利要求1所述的无人机中继网络抗干扰方法,其特征在于,建立的干扰泄漏模型为:
3.根据权利要求1所述的无人机中继网络抗干扰方法,其特征在于,该抗干扰方法还包括以传输容量最大为目标对用户进行传输功率分配。
4.根据权利要求3所述的无人机中继网络抗干扰方法,其特征在于,在对传输功率进行分配时构建的目标函数的表达式为:
5.根据权利要求4所述的无人机中继网络抗干扰方法,其特征在于,所述目标函数采用拉格朗日乘子法进行求解。
6.根据权利要求5所述的无人机中继网络抗干扰方法,其特征在于,在对目标函数采用拉格朗日乘子法进行求解时构建的函数的表达式为:
7.一种无人机中继网络系统,包括无人机中继、接收端和发送端,其特征在于,该系统采用权利要求1-6任一项所述的无人机中继网络抗干扰方法进行信息传输。
技术总结
本发明涉及一种无人机中继网络抗干扰方法及无人机中继网络系统,属于无线通信技术领域。根据无人机通信系统模型、外部干扰信号建立无人机的干扰泄漏模型,包括无人机中继和接收端的干扰泄漏模型以及无人机中继和发送端的干扰泄漏模型。基于干扰对齐技术求解无人机的干扰泄漏模型,使无人机中继的干扰泄漏能量值、接收端的干扰泄漏能量值和发送端的干扰泄漏能量值减小到0或达到最大迭代次数,以此得到无人机中继和发送端的编码矩阵以及无人机中继和接收端的解码矩阵。基于得到的编码矩阵和解码矩阵进行无人机信号的传输。本发明有效地解决了现有技术中在存在外部恶意干扰时抗干扰性能较差、不能很好地起到抗干扰作用的问题。
技术研发人员:冀保峰,樊会涛,张云超,张高远,陶发展,孙力帆,张平,张冀,王东署,王楠,陈韵然,刘一凡,王赛兵,张晶晶,郭冬梅
受保护的技术使用者:龙门实验室
技术研发日:
技术公布日:2024/7/4
- 还没有人留言评论。精彩留言会获得点赞!