一种自适应运动的线阵数码相机的制作方法
本发明涉及数码相机,特别涉及一种自适应运动的线阵数码相机。
背景技术:
1、近年来,线阵数码相机在工业生产领域崭露头角,应用范围不断扩大。相比于面阵数码相机,线阵数码相机能够逐行拍摄连续运动的物体,并把所拍摄的每行图像合并成一幅巨幅高清图像。但其缺点是线阵数码相机的部署难度较大,技术要求较高。当被拍摄的运动物体在非匀速运动状态下,会导致拍摄的图像出现畸变和失真。所以一般需要在被拍摄物体所在的运动机台上安装编码器,以实时检测被拍摄物体的运动方向和速度。该编码器在机台的带动下同步输出一组名为“行频信号”的脉冲信号到线阵数码相机,确保相邻行之间的采集间隔是恒定的,以避免图像畸变和失真。但是该编码器是机械结构,使用寿命有限,传输精度较低,在被拍摄物体启停的过程中会出现瞬时滞后,容易影响线扫相机拍摄图像质量。
技术实现思路
1、本发明的目的是为了解决上述相关问题,设计了一种自适应运动的线阵数码相机。为实现上述目的,本发明提供了如下方案:
2、一种自适应运动的线阵数码相机,包括线阵图像传感器,镜头,外壳,电路板,处理器,所述外壳上含有镜头连接口,所述镜头通过所述镜头连接口与所述外壳相连,所述线阵图像传感器和处理器安装在电路板上,其特征在于,还包括面阵图像传感器,所述面阵图像传感器安装在所述电路板上,所述镜头连接口上开有通孔,所述通孔与所述面阵图像传感器的大小和位置对应,所述面阵图像传感器可通过所述通孔采集图像。
3、作为本技术方案的进一步改进,所述通孔可安装滤光片。
4、作为本技术方案的进一步改进,所述自适应运动的线阵数码相机可与计算机连接通信。
5、作为本技术方案的进一步改进,所述线阵图像传感器和面阵图像传感器的曝光时间由所述处理器同步调节。
6、作为本技术方案的进一步改进,所述线阵图像传感器和面阵图像传感器同时采集图像。
7、作为本技术方案的进一步改进,所述处理器或所述计算机根据所述面阵图像传感器采集的连续帧图像存在的差异,实时计算出被拍摄物体运动的位移、速度、角度;在行频固定情况下拍摄时,计算所述面阵图像传感器采集的图像的速度,调整所述线阵图像传感器采集图像的速度保持恒定;在行频变换情况下拍摄时,计算所述面阵图像传感器采集的图像的速度,所述处理器根据所述面阵图像传感器采集的图像的速度实时产生一个正比的行频信号,所述线阵图像传感器根据该行频信号采集图像。
8、作为本技术方案的进一步改进,计算所述面阵图像传感器采集的连续帧图像存在角度偏差时,根据所述面阵图像传感器采集的连续帧图像存在角度偏差值,通过仿射变换,调整所述线阵图像传感器采集的图像;该角度偏差值通过所述自适应运动的线阵数码相机反馈给所述计算机。
9、作为本技术方案的进一步改进,所述面阵图像传感器可以替换成与所述线阵图像传感器位置垂直的线阵图像传感器,所述通孔可替换成与所述线阵图像传感器位置垂直的线阵图像传感器大小和位置对应的通孔。
10、一种利用自适应运动的线阵数码相机的图像采集方法,包括以下步骤:
11、s1.通过线阵图像传感器和面阵图像传感器同时获取图像;
12、s2.计算面阵图像传感器采集的连续帧图像存在的差异,实时计算出被拍摄物体运动的位移、速度、角度;
13、s3.根据被拍摄物体运动的位移、速度、角度对所述线阵图像传感器的拍摄过程及结果进行调节。
14、作为本技术方案的进一步改进,在行频固定情况下拍摄时,根据面阵图像传感器采集的图像的速度,调整线阵图像传感器采集图像的速度保持恒定;在行频变换情况下拍摄时,根据面阵图像传感器采集的图像的速度产生一个正比的行频信号,线阵图像传感器根据该行频信号采集图像;根据面阵图像传感器采集的连续帧图像的角度偏差,通过仿射变换,调整线阵图像传感器采集的图像的角度。
技术特征:
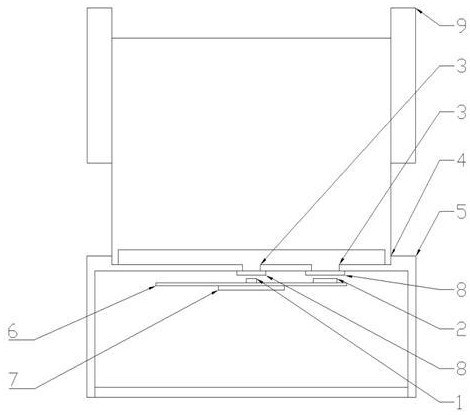
1.一种自适应运动的线阵数码相机,包括线阵图像传感器(1),镜头(9),外壳(5),电路板(6),处理器(7),所述外壳(5)上含有镜头连接口(4),所述镜头(9)通过所述镜头连接口(4)与所述外壳(5)相连,所述线阵图像传感器(1)和处理器(7)安装在电路板(6)上,其特征在于,还包括面阵图像传感器(2),所述面阵图像传感器(2)安装在所述电路板(6)上,所述镜头连接口(4)上开有通孔(3),所述通孔(3)与所述面阵图像传感器(2)的大小和位置对应,所述面阵图像传感器(2)可通过所述通孔(3)采集图像。
2.根据权利要求1所述的自适应运动的线阵数码相机,其特征在于,所述通孔(3)可安装滤光片(8)。
3.根据权利要求2所述的自适应运动的线阵数码相机,其特征在于,所述自适应运动的线阵数码相机可与计算机连接通信。
4.根据权利要求3所述的自适应运动的线阵数码相机,其特征在于,所述线阵图像传感器(1)和面阵图像传感器(2)的曝光时间由所述处理器(7)同步调节。
5.根据权利要求4所述的自适应运动的线阵数码相机,其特征在于,所述线阵图像传感器(1)和面阵图像传感器(2)同时采集图像。
6.根据权利要求5所述的自适应运动的线阵数码相机,其特征在于,所述处理器(7)或所述计算机根据所述面阵图像传感器采集的连续帧图像存在的差异,实时计算出被拍摄物体运动的位移、速度、角度;在行频固定情况下拍摄时,计算所述面阵图像传感器采集的图像的速度,调整所述线阵图像传感器(1)采集图像的速度保持恒定;在行频变换情况下拍摄时,计算所述面阵图像传感器采集的图像的速度,所述处理器(7)根据所述面阵图像传感器采集的图像的速度实时产生一个正比的行频信号,所述线阵图像传感器(1)根据该行频信号采集图像。
7.根据权利要求6所述的自适应运动的线阵数码相机,其特征在于,计算所述面阵图像传感器采集的连续帧图像存在角度偏差时,根据所述面阵图像传感器采集的连续帧图像存在角度偏差值,通过仿射变换,调整所述线阵图像传感器(1)采集的图像;该角度偏差值通过所述自适应运动的线阵数码相机反馈给所述计算机。
8.根据权利要求1所述的自适应运动的线阵数码相机,其特征在于,所述面阵图像传感器(2)可以替换成与所述线阵图像传感器(1)位置垂直的线阵图像传感器,所述通孔(3)可替换成与所述线阵图像传感器(1)位置垂直的线阵图像传感器大小和位置对应的通孔。
9.一种利用权利要求1~8中任意一种所述自适应运动的线阵数码相机的图像采集方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的图像采集方法,其特征在于,步骤s3的具体实现方式为:在行频固定情况下拍摄时,根据面阵图像传感器采集的图像的速度,调整线阵图像传感器采集图像的速度保持恒定;在行频变换情况下拍摄时,根据面阵图像传感器采集的图像的速度产生一个正比的行频信号,线阵图像传感器根据该行频信号采集图像;根据面阵图像传感器采集的连续帧图像的角度偏差,通过仿射变换,调整线阵图像传感器采集的图像的角度。
技术总结
本发明涉及数码相机技术领域,特别涉及一种自适应运动的线阵数码相机。包括线阵图像传感器,面阵图像传感器,通孔,镜头连接口,外壳,电路板,处理器,滤光片,镜头,所述面阵图像传感器安装在所述电路板上,所述镜头连接口上开有通孔,所述通孔与所述面阵图像传感器的大小和位置对应,所述面阵图像传感器可通过所述通孔采集图像。可以通过自带的面阵图像传感器实时获取所拍摄物体的位移、速度和角度,再由该位移、速度和角度的计算结果进行自适应调整,极大提升了拍摄控制的精度,并且为光电结构,对线阵图像传感器的调节不受机械启停、惯性和寿命的影响,避免采集图像的畸变和失真。
技术研发人员:聂忠强
受保护的技术使用者:深圳市度申科技有限公司
技术研发日:
技术公布日:2024/5/29
- 还没有人留言评论。精彩留言会获得点赞!