用于投影仪的自动对焦方法、投影仪及存储介质与流程
本发明涉及投影设备,尤其涉及一种用于投影仪的自动对焦方法、投影仪及存储介质。
背景技术:
1、现有的投影仪使用的光机是可变焦的,由对焦马达通过传动机构将扭力作用在镜筒上,让镜筒前后移动以进一步保证投出的画面清晰。然而,在实际生产与应用中,光机亮度越做越大,镜筒也跟着变重,而与此同时为了美观,投影仪的整体尺寸需要保持短小精悍,因此,给对焦马达预留的空间减小,部分场景下(例如投影仪向天花板投影)对焦马达除了需要克服镜筒阻力外,还需要克服镜筒自身重力,这样一来对焦马达输出的扭力相对不足导致失步,导致影响对焦精度甚至对焦模糊。
技术实现思路
1、为解决上述技术问题,本发明提出一种用于投影仪的自动对焦方法、投影仪及存储介质,能够根据投影仪的重力分量动态地调整对焦马达来达到调焦不失步的效果,减少重力对对焦精确度的影响。
2、为了达到上述目的,本发明采用以下技术方案:
3、第一方面,本发明公开了一种用于投影仪的自动对焦方法,包括以下步骤:
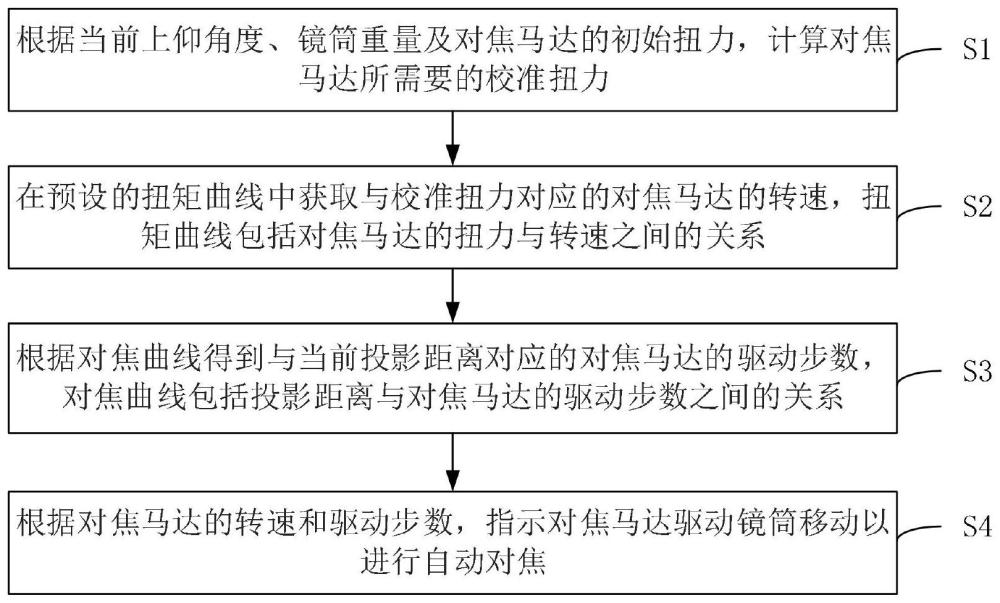
4、根据当前上仰角度、镜筒重量及对焦马达的初始扭力,计算所述对焦马达所需要的校准扭力;
5、在预设的扭矩曲线中获取与所述校准扭力对应的所述对焦马达的转速,所述扭矩曲线包括所述对焦马达的扭力与转速之间的关系;
6、根据对焦曲线得到与当前投影距离对应的所述对焦马达的驱动步数,所述对焦曲线包括投影距离与对焦马达的驱动步数之间的关系;
7、根据所述对焦马达的转速和驱动步数,指示所述对焦马达驱动镜筒移动以进行自动对焦。
8、优选地,所述根据所述当前上仰角度、所述镜筒重量及所述对焦马达的初始扭力,计算所述对焦马达所需要的校准扭力,包括:
9、根据所述投影仪的当前上仰角度和所述镜筒重量,得到镜筒平行于对焦移动方向的重力分量;
10、根据所述重力分量和所述对焦马达的初始扭力,得到所述对焦马达所需要的校准扭力。
11、优选地,所述对焦马达所需要的校准扭力n0的计算方式包括:
12、n0=g(x)+g*sinα1;
13、其中,g为镜筒的重力,α1为所述投影仪的当前上仰角度;x为所述对焦马达的默认转速,g(x)为默认转速x下所对应的所述对焦马达的初始扭力。
14、优选地,所述根据所述重力分量和所述对焦马达的初始扭力,得到所述对焦马达所需要的校准扭力,包括:
15、根据镜筒的对焦移动方向与重力分量方向,确定镜筒系数;
16、将所述镜筒系数与所述重力分量之积与所述对焦马达的初始扭力求和,以得到所述对焦马达所需要的校准扭力。
17、优选地,所述对焦马达所需要的校准扭力n0的计算方式包括:
18、n0=g(x)+k*g*|sinα1|;
19、其中,g为镜筒的重量,α1为所述投影仪的当前上仰角度,k为镜筒系数,当所述镜筒的对焦移动方向与所述重力分量方向相同时,k为-1;当所述镜筒的对焦移动方向与所述重力分量方向相反时,k为1;x为所述对焦马达的默认转速,g(x)为默认转速x下所对应的所述对焦马达的初始扭力。
20、优选地,所述根据当前上仰角度、镜筒重量及对焦马达的初始扭力,计算所述对焦马达所需要的校准扭力之前还包括:
21、获取所述投影仪在水平放置时镜筒从对焦起始端到另一端移动所花的第一时间及预设的默认时间;
22、根据所述第一时间与所述默认时间的差值比例,与所述对焦马达的初始工作转速与预设的默认转速的差值比例,得到所述对焦马达的所述初始工作转速;
23、在预设的扭矩曲线中得到与所述初始工作转速对应的对焦马达的初始扭力。
24、优选地,所述根据对焦曲线得到与当前投影距离对应的所述对焦马达的驱动步数,所述对焦曲线包括投影距离与对焦马达的驱动步数之间的关系之前还包括:
25、获取预设的对焦曲线及所述投影仪在第一投影距离下的对焦马达的校准步数;
26、根据所述第一投影距离,在所述对焦曲线中确定对应的参考步数;
27、根据校准步数与参考步数之差,得到偏差校准步数;
28、所述根据对焦曲线得到与当前投影距离对应的所述对焦马达的驱动步数,包括:
29、获取所述投影仪的当前投影距离,并在所述对焦曲线中得到与所述当前投影距离对应的所述对焦马达的理论对焦步数;
30、根据所述理论对焦步数与所述偏差校准步数之和,得到对焦马达的驱动步数。
31、优选地,所述偏差校准步数的计算方式包括:
32、s偏差=s校准-f(d)
33、其中,s偏差为所述偏差校准步数;s校准为所述校准步数;d为所述第一投影距离;f(d)为所述第一投影距离在所述对焦曲线中对应的参考步数。
34、第二方面,本发明公开了一种投影仪,包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序能够被所述处理器读取以执行以实现如第一方面所述的自动对焦方法。
35、第三方面,本发明公开了一种存储介质,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为可被一处理器运行以执行第一方面所述的自动对焦方法。
36、与现有技术相比,本发明的有益效果在于:本发明提出的用于投影仪的自动对焦方法、投影仪及存储介质,其中根据获取的投影仪的当前上仰角度和镜筒重量来校准对焦马达的输出扭力,以补偿镜筒的重力分量所带来的误差影响,实现动态地调节对焦马达来达到调焦不失步的效果,减少重力对对焦精确度的影响,大大提高自动对焦的准确性。
37、在进一步的方案中,本发明还具有以下有益效果:
38、(1)在根据投影仪的当前上仰角度对对焦马达的输出扭力进行校准之前,还对对焦马达的初始扭力进行校正,可以进一步改善对焦效果,避免因为对焦马达输出扭力的不一致性或者老化偏差而导致对焦结果出现偏差。
39、(2)在获取对焦马达的驱动步数之前,还确定偏差校准步数,并根据偏差校准步数对驱动步数进行校正,以消除光机生产过程中所存在的公差,进一步提高对焦效果。
技术特征:
1.一种用于投影仪的自动对焦方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的自动对焦方法,其特征在于,所述根据当前上仰角度、镜筒重量及对焦马达的初始扭力,计算所述对焦马达所需要的校准扭力,包括:
3.根据权利要求2所述的自动对焦方法,其特征在于,所述对焦马达所需要的校准扭力n0的计算方式包括:
4.根据权利要求2所述的自动对焦方法,其特征在于,所述根据所述重力分量和所述对焦马达的初始扭力,得到所述对焦马达所需要的校准扭力,包括:
5.根据权利要求4所述的自动对焦方法,其特征在于,所述对焦马达所需要的校准扭力n0的计算方式包括:
6.根据权利要求1所述的自动对焦方法,其特征在于,所述根据当前上仰角度、镜筒重量及对焦马达的初始扭力,计算所述对焦马达所需要的校准扭力之前还包括:
7.根据权利要求1所述的自动对焦方法,其特征在于,
8.根据权利要求7所述的自动对焦方法,其特征在于,所述偏差校准步数的计算方式包括:
9.一种投影仪,其特征在于,包括处理器和存储器,所述存储器中存储有计算机程序,所述计算机程序能够被所述处理器读取以执行以实现如权利要求1至8任一项所述的自动对焦方法。
10.一种存储介质,其特征在于,所述存储介质中存储有计算机程序,其中,所述计算机程序被设置为可被一处理器运行以执行权利要求1至8任一项中所述的自动对焦方法。
技术总结
本发明公开了一种用于投影仪的自动对焦方法、投影仪及存储介质,自动对焦方法包括:根据当前上仰角度、镜筒重量及对焦马达的初始扭力,计算对焦马达所需要的校准扭力;在预设的扭矩曲线中获取与校准扭力对应的对焦马达的转速;根据对焦曲线得到与当前投影距离对应的对焦马达的驱动步数;根据对焦马达的转速和驱动步数,指示对焦马达驱动镜筒移动以进行自动对焦。本发明能够根据投影仪的重力分量动态地调整对焦马达来达到调焦不失步的效果,减少重力对对焦精确度的影响。
技术研发人员:李志,金凌琳,杨廷彬
受保护的技术使用者:深圳市当智科技有限公司
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!