一种工业物联网芯片的硬件时间同步实现方法与流程
本发明涉及工业无线通信,具体为一种工业物联网芯片的硬件时间同步实现方法。
背景技术:
1、近些年,无线通信技术取得了突飞猛进的发展,而工业物联网技术作为无线通信技术的一个分支更是在近几年内飞速前进。工业无线传感网络技术是从无线传感器网络技术演化而来,是一种面向设备间短程、低速率信息交互的无线通信技术,其网络具有低功耗、安装维护成本低等特点,已成为工业自动化领域的又一发展趋势,目前,工业无线标准的制定成为工业物联网技术竞争的焦点。在工业环境下建立高可靠性,高实时性的无线传感网络成为人们迫切的需求。
2、经查公开号:cn102869087b,公开了工业物联网芯片的硬件时间同步实现方法,基于工业无线isa100.11a网络与wia-pa网络的时间同步,将时间同步分为广告帧/信标帧的时间同步和确认帧的时间同步。根据用户配置的广告帧/信标帧中时间戳的偏移,硬件芯片完成开始发送或开始接收时刻本地时钟时间的捕获,时间戳的插入或解析,时钟偏差的计算及本地时钟校准。确认帧时间同步中,由硬件芯片自动完成确认帧时间差,自动校准本地时钟。该实现方法提高了工业物联网时间同步的精确度和可靠性,同时减轻芯片负担。
3、而基于上述的现有技术,目前现有的工业物联网芯片的硬件时间同步实现方法还存在以下问题,现有的时间戳在应用过程中时间基准的精度不够,并且有一定的误差和噪声,为此,本发明提供了一种工业物联网芯片的硬件时间同步实现方法。
技术实现思路
1、针对现有技术的不足,本发明提供了一种工业物联网芯片的硬件时间同步实现方法,解决了现有的工业物联网芯片的硬件时间同步实现方法还存在以下问题,现有的时间戳在应用过程中时间基准的精度不够,并且有一定的误差和噪声。
2、为实现以上目的,本发明通过以下技术方案予以实现:一种工业物联网芯片的硬件时间同步实现方法,具体包括以下步骤:
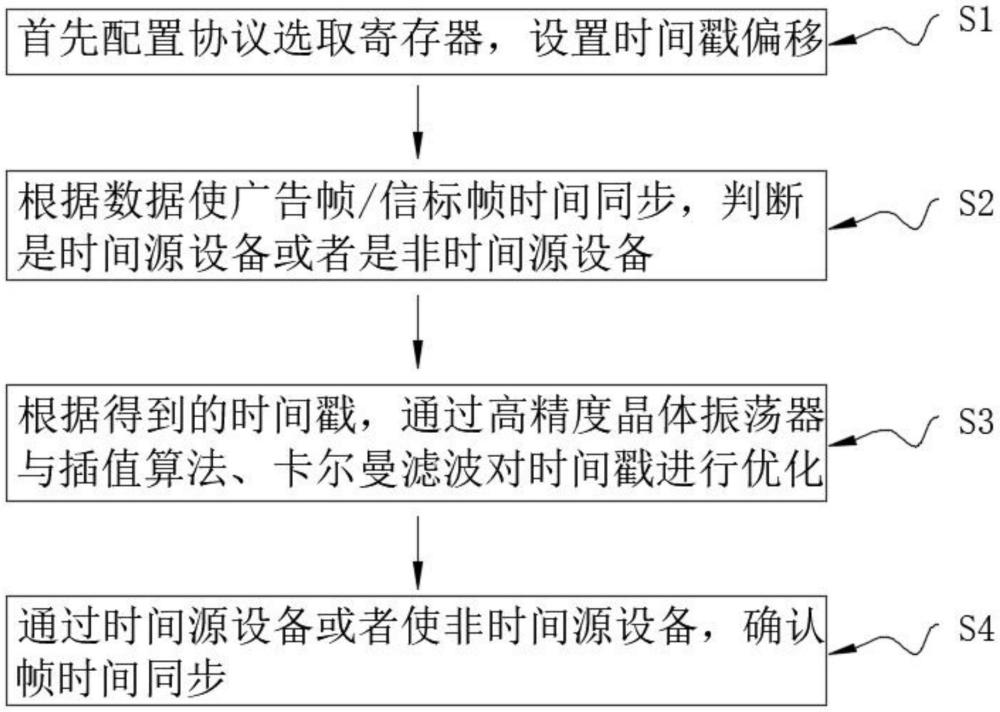
3、s1:首先配置协议选取寄存器,设置时间戳偏移;
4、s2:根据数据使广告帧/信标帧时间同步,判断是时间源设备或者是非时间源设备;
5、s3:根据得到的时间戳,通过高精度晶体振荡器与插值算法、卡尔曼滤波对时间戳进行优化;
6、s4:通过时间源设备或者非时间源设备,确认帧时间同步。
7、优选的,所述s1的具体方法为:
8、a1:用户配置物联网芯片的协议选取protocal寄存器,选择ieee802.15.4、wia-pa、isa100.11a三种模式中的一种模式;
9、a2:设置时间戳在广告帧/信标帧中的偏移位置tstamp_offset。
10、优选的,所述s2中时间源设备操作方法为:
11、捕获本地时间:当到达广告帧/信标帧发送时隙边界时,硬件芯片在产生帧首定界符(sfd)中断时自动捕获本地时钟时间t1;
12、插入时间戳:将捕获的时间戳t1按照配置的偏移位置tstamp_offset插入到广告帧/信标帧中;
13、发送广告帧:发送包含时间戳的广告帧/信标帧。
14、优选的,所述s2中非时间源设备操作方法为:
15、接收广告帧:当接收到广告帧/信标帧时,硬件芯片在产生sfd中断时自动捕获本地时钟时间t2;
16、解析时间戳:解析广告帧/信标帧中的时间戳信息t1;
17、计算时间差:计算时间差tcl(tstamp_offset)=|t1-t2|,即时钟偏差;
18、校准本地时钟:根据时钟偏差tcl(tstamp_offset)校准本地时钟,确保本地时钟与时间源设备的时间同步。
19、优选的,所述s3中的操作方法为:
20、b1:引入高精度晶体振荡器,提供纳秒级时间基准;
21、b2:采用插值算法对捕获的时间戳进行平滑处理,以减小随机误差和噪声对时间同步精度的影响;
22、b3:应用数字滤波技术,使用卡尔曼滤波,对时间戳数据进行预处理。
23、优选的,所述插值多项式p(x)的一般形式为:
24、[p(x)=a_n xn+a_{n-1}x{n-1}+\cdots+a_1x+a_0]
25、其中,(a_n,a_{n-1},\ldots,a_1,a_0)是多项式的系数,通过解线性方程组来确定。
26、优选的,所述s4中时间源设备针对接收到的数据帧操作方法:
27、捕获本地时间:在接收数据帧后,开始接收确认帧时,硬件芯片在产生sfd中断时自动捕获本地时钟时间t5;
28、计算时间偏移:计算t5与时隙起始边界的时间偏移offset_y;
29、返回确认帧:将offset_y信息装入确认帧中,并返回给数据发送方(非时间源设备)。
30、优选的,所述s4中时间源设备针对接收到的数据帧操作方法:
31、发送数据帧:发送数据帧后,等待接收确认帧;
32、记录发送时间:在发送数据帧时,当产生sfd中断时记录发送帧时sfd中断时刻本地时钟时间t4;
33、计算发送时间偏移:计算t4与时隙起始边界的时间偏移offset_x;
34、接收确认帧:接收确认帧,解析出offset_y信息;
35、比较时间偏移:比较offset_x与offset_y,若两者不相等,则表明收发双方存在时钟偏差;
36、计算时钟偏差:根据公式t=t4±|offset_x-offset_y|计算本地时钟偏差;
37、校准本地时钟:根据计算得到的时钟偏差校准本地时钟,确保本地时钟与时间源设备的时间同步。
38、本发明提供了一种工业物联网芯片的硬件时间同步实现方法。与现有技术相比具备以下有益效果:
39、该工业物联网芯片的硬件时间同步实现方法,首先配置协议选取寄存器,设置时间戳偏移,根据数据使广告帧/信标帧时间同步,判断是时间源设备或者是非时间源设备,根据得到的时间戳,通过高精度晶体振荡器与插值算法、卡尔曼滤波对时间戳进行优化,通过时间源设备或者非时间源设备,确认帧时间同步,通过使用高精度晶振,可以显著降低时钟信号的误差,从而提高时间戳的捕获精度,为时间同步提供更为可靠的时间基准,通过采用插值算法对捕获的时间戳进行平滑处理,可以滤除这些随机误差和噪声,使时间戳的变化趋势更加平稳和准确,应用卡尔曼滤波对时间戳数据进行预处理,可以进一步提高时间戳数据的准确性和可靠性,并且动态地调整时间戳的估计值,从而减小噪声和误差对时间同步精度的影响。
技术特征:
1.一种工业物联网芯片的硬件时间同步实现方法,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s1的具体方法为:
3.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s2中时间源设备操作方法为:
4.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s2中非时间源设备操作方法为:
5.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s3中的操作方法为:
6.根据权利要求5所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述插值多项式p(x)的一般形式为:
7.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s4中时间源设备针对接收到的数据帧操作方法:
8.根据权利要求1所述的一种工业物联网芯片的硬件时间同步实现方法,其特征在于:所述s4中时间源设备针对接收到的数据帧操作方法:
技术总结
本发明公开了一种工业物联网芯片的硬件时间同步实现方法,涉及工业无线通信技术领域,首先配置协议选取寄存器,设置时间戳偏移,根据数据使广告帧/信标帧时间同步,判断是时间源设备或者是非时间源设备,根据得到的时间戳,通过高精度晶体振荡器与插值算法、卡尔曼滤波对时间戳进行优化,通过时间源设备或者非时间源设备,确认帧时间同步,通过使用高精度晶振,可以显著降低时钟信号的误差,从而提高时间戳的捕获精度,为时间同步提供更为可靠的时间基准,通过采用插值算法对捕获的时间戳进行平滑处理,可以滤除这些随机误差和噪声,使时间戳的变化趋势更加平稳和准确。
技术研发人员:李广宇,刘刚
受保护的技术使用者:苏州时统芯科技有限公司
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!