一种水池清洁设备的控制方法和水池清洁系统与流程
本申请涉及泳池清洁,特别涉及一种水池清洁设备的控制方法和水池清洁系统。
背景技术:
1、水池清洁设备是指对水池进行清洁的设备,具体的,水池清洁设备可以是泳池机器人;而水池清洁设备在运行过程并不清楚自身以及基站的位置,现有技术中,水池清洁设备的定位控制逻辑复杂,且精度不高;进而导致水池清洁设备依赖于定位的控制精度较差。
技术实现思路
1、针对现有技术的上述问题,本申请的目的在于通过水池清洁设备在当前位置转动,并基于接收信息确定基站所在的目标方向,降低水池清洁设备的定位难度以及提高水池清洁设备的定位精度。
2、为了解决上述问题,本申请提供了一种水池清洁设备的控制方法,所述水池清洁设备上设有信号接收单元,所述信号接收单元被配置为可接收来自基站上的信号发射单元的发射信号,所述方法包括:
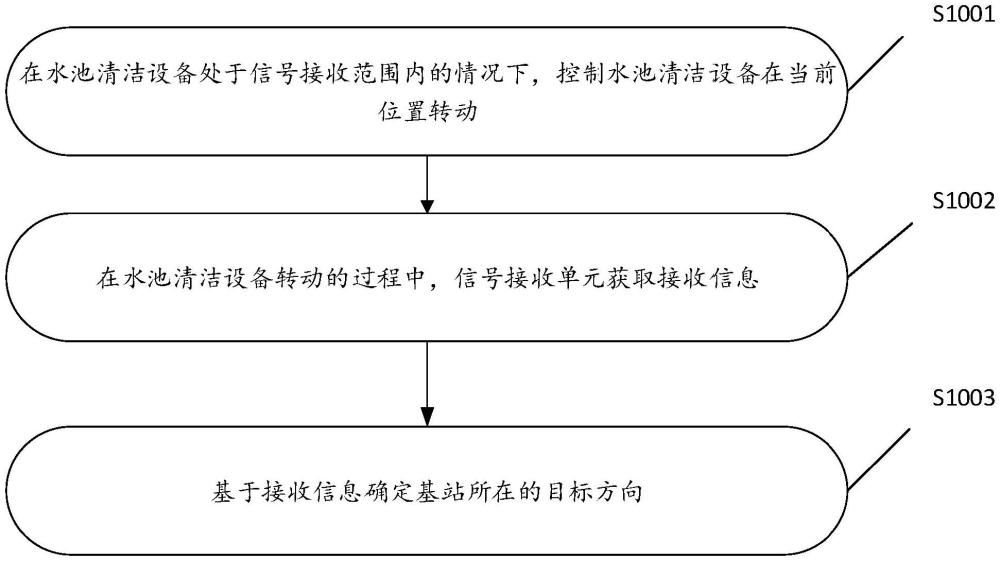
3、在所述水池清洁设备处于信号接收范围内的情况下,控制所述水池清洁设备在当前位置转动;
4、在所述水池清洁设备转动的过程中,所述信号接收单元获取接收信息;
5、基于所述接收信息确定所述基站所在的目标方向。
6、在本申请实施例中,所述控制所述水池清洁设备在当前位置转动包括:所述水池清洁设备至少自转一周。
7、在本申请实施例中,获取所述目标方向后,控制所述水池清洁设备转向所述目标方向并沿着目标方向移动至所述基站。
8、在本申请实施例中,基于所述接收信息确定所述基站所在的目标方向包括:基于所述接收信息确定计算方向,所述目标方向与所述计算方向垂直。
9、在本申请实施例中,所述接收信息包括信号接收时间差,所述信号接收时间差用于反映所述信号接收单元获取接收信息时与基站之间的距离值。
10、在本申请实施例中,所述信号接收单元至少包括第一信号接收单元以及第二信号接收单元。
11、在本申请实施例中,所述计算方向是基于两个信号接收单元在满足预设条件时的装配位置的连线方向确定的。
12、在本申请实施例中,所述预设条件为:所述第一信号接收单元的信号接收时间差等于所述第二信号接收单元的信号接收时间差。
13、在本申请实施例中,所述两个信号接收单元在满足预设条件时的装配位置的连线中点经过所述目标方向。
14、另一方面,本申请还提供一种水池清洁系统,所述系统包括基站和水池清洁设备,所述水池清洁设备上设有信号接收单元以及控制器,所述信号接收单元被配置为可接收来自基站上的信号发射单元的发射信号,所述控制器用于在所述水池清洁设备处于所述信号发射单元对应的信号接收范围内的情况下,控制所述水池清洁设备在当前位置转动;用于在所述水池清洁设备转动的过程中,所述信号接收单元获取接收信息;以及用于基于所述接收信息确定所述基站所在的目标方向。
15、另一方面,本申请还提供一种电子设备,所述设备包括处理器和存储器,所述存储器中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由所述处理器加载并执行以实现如上述水池清洁设备的控制方法。
16、另一方面,本申请还提供一种计算机存储介质,所述存储介质中存储有至少一条指令或至少一段程序,所述至少一条指令或所述至少一段程序由处理器加载并执行以实现如上述水池清洁设备的控制方法。
17、由于上述技术方案,本申请所述的一种水池清洁设备的控制方法具有以下有益效果:
18、通过在水池清洁设备处于信号接收范围内的情况下,控制水池清洁设备在当前位置转动,进而基于水池清洁设备的信号接收单元获取的接收信息确定基站所在的目标方向,以水池清洁设备转动的方式即可确定基站的目标方向,进而降低水池清洁设备的定位难度以及提高水池清洁设备的定位精度。
技术特征:
1.一种水池清洁设备的控制方法,其特征在于,所述水池清洁设备上设有信号接收单元,所述信号接收单元被配置为可接收来自基站上的信号发射单元的发射信号,所述方法包括:
2.根据权利要求1所述的水池清洁设备的控制方法,其特征在于,所述控制所述水池清洁设备在当前位置转动包括:所述水池清洁设备至少自转一周。
3.根据权利要求1所述的水池清洁设备的控制方法,其特征在于,获取所述目标方向后,控制所述水池清洁设备转向所述目标方向并沿着目标方向移动至所述基站。
4.根据权利要求1-3任一项所述的水池清洁设备的控制方法,其特征在于,基于所述接收信息确定所述基站所在的目标方向包括:基于所述接收信息确定计算方向,所述目标方向与所述计算方向垂直。
5.根据权利要求4所述的水池清洁设备的控制方法,其特征在于,所述接收信息包括信号接收时间差,所述信号接收时间差用于反映所述信号接收单元获取接收信息时与所述基站之间的距离值。
6.根据权利要求5任一项所述的水池清洁设备的控制方法,其特征在于,所述信号接收单元至少包括第一信号接收单元以及第二信号接收单元。
7.根据权利要求6所述的水池清洁设备的控制方法,其特征在于,所述计算方向是基于两个信号接收单元在满足预设条件时的装配位置的连线方向确定的。
8.根据权利要求7所述的水池清洁设备的控制方法,其特征在于,所述预设条件为:所述第一信号接收单元的信号接收时间差等于所述第二信号接收单元的信号接收时间差。
9.根据权利要求8所述的水池清洁设备的控制方法,其特征在于,所述两个信号接收单元在满足预设条件时的装配位置的连线中点经过所述目标方向。
10.一种水池清洁系统,其特征在于,包括基站和水池清洁设备,所述水池清洁设备上设有信号接收单元以及控制器,所述信号接收单元被配置为可接收来自基站上的信号发射单元的发射信号,所述控制器用于在所述水池清洁设备处于所述信号发射单元对应的信号接收范围内的情况下,控制所述水池清洁设备在当前位置转动;在所述水池清洁设备转动的过程中,所述信号接收单元获取接收信息;以及所述控制器用于基于所述接收信息确定所述基站所在的目标方向。
技术总结
本申请涉及泳池清洁技术领域,特别涉及一种水池清洁设备的控制方法和水池清洁系统;水池清洁设备上设有信号接收单元,信号接收单元被配置为可接收来自基站上的信号发射单元的发射信号,该方法包括:在水池清洁设备处于信号接收范围内的情况下,控制水池清洁设备在当前位置转动;在水池清洁设备转动的过程中,信号接收单元获取接收信息;基于接收信息确定基站所在的目标方向;通过水池清洁设备在当前位置转动,并基于接收信息确定基站所在的目标方向,降低水池清洁设备的定位难度以及提高水池清洁设备的定位精度。
技术研发人员:宋庆祥
受保护的技术使用者:元鼎智能创新(国际)有限公司
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!