固定交通环境视觉内容管理系统的制作方法
本发明涉及交通管理领域,尤其涉及一种固定交通环境视觉内容管理系统。
背景技术:
1、交通管理的目的在于认识并遵循道路交通流所固有的客观规律,运用现代化的技术手段和科学的原则、方法、措施,不断地提高交通管理的效率和质量,以求得延误更少,运行时间更短,通行能力更大,秩序更好和运行费用更低,从而获得最好的社会经济、交通与环境效益,为经济发展,人们生活水平与出行质量提高的服务。
2、在交通管理中,火车是一种主要的管理的交通工具,一般地,可以采用固定在火车站站台上方以在火车站站台处于火车停靠状态时执行面对火车站站台的视觉监控操作的监控装置,用于获取并输出相应的捕获图片,问题在于,图片接收端即使知道接收到的图片经过了各项图像处理,但因为无法确定各项图像处理的处理次序,导致仍旧很难还原捕获图片对应的、能够反应火车站站台真实场景的原始图片。
技术实现思路
1、为了解决现有技术中的技术问题,本发明提供了一种固定交通环境视觉内容管理系统,通过基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值,其中,在所述二进制数值中包括首尾连接的各项图像处理分别对应的各项次序数值,每一项图像处理对应的次序数值由该项图像处理的执行序号加该项图像处理的ascll码进行表示,从而明确了当前捕获图片被执行的各种图像处理的次序,其中,定向获取设备的各项拍摄参数为定向获取设备的快门速度、曝光度以及解析度,当前捕获图片的各项可视化数据为当前捕获图片的最大噪声幅值、噪声类型数量、背景面积占比以及各个像素点分别对应的各份亮度数值的均值,从而为各种图像处理的次序分析提供关键的基础信息,以及用于执行各种图像处理的次序分析的极限学习机神经网络模型的结构为针对性设计的结构,具体为引入训练映射装置用于对极限学习机神经网络进行多次训练动作以获得完成多次训练动作后的极限学习机神经网络并作为极限学习机神经网络模型输出。
2、根据本发明,提供了一种固定交通环境视觉内容管理系统,所述系统包括:
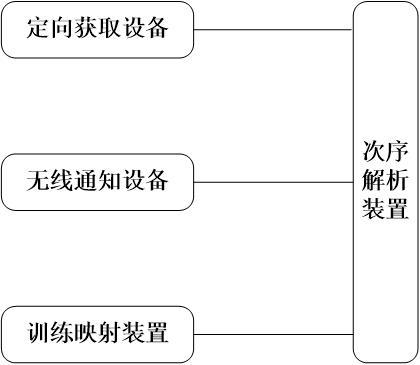
3、定向获取设备,固定在火车站站台上方以在火车站站台处于火车停靠状态时执行面对火车站站台的视觉监控操作,用于获取并输出相应的当前捕获图片;
4、无线通知设备,与次序解析装置连接,用于将接收到的代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值通过无线数据通道通知给远端的区块链处理节点;
5、训练映射装置,用于对极限学习机神经网络进行多次训练动作以获得完成多次训练动作后的极限学习机神经网络并作为极限学习机神经网络模型输出;
6、次序解析装置,设置在视觉监控端且分别与所述定向获取设备、所述无线通知设备以及所述训练映射装置连接,用于基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值,其中,在所述二进制数值中包括首尾连接的各项图像处理分别对应的各项次序数值,每一项图像处理对应的次序数值由该项图像处理的执行序号加该项图像处理的ascll码进行表示;
7、其中,基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值包括:定向获取设备的各项拍摄参数为定向获取设备的快门速度、曝光度以及解析度;
8、其中,基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值还包括:当前捕获图片的各项可视化数据为当前捕获图片的最大噪声幅值、噪声类型数量、背景面积占比以及各个像素点分别对应的各份亮度数值的均值;
9、其中,在所述二进制数值中包括首尾连接的各项图像处理分别对应的各项次序数值,每一项图像处理对应的次序数值由该项图像处理的执行序号加该项图像处理的ascll码进行表示包括:每一项图像处理为点像复原处理、旋转校正处理、图像锐化处理、图像增强处理以及图像滤波处理中的一种。
10、由此可见,本发明至少具备以下几处主要的发明构思:
11、第一处发明构思:基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值,其中,在所述二进制数值中包括首尾连接的各项图像处理分别对应的各项次序数值,每一项图像处理对应的次序数值由该项图像处理的执行序号加该项图像处理的ascll码进行表示,从而明确了当前捕获图片被执行的各种图像处理的次序;
12、第二处发明构思:定向获取设备的各项拍摄参数为定向获取设备的快门速度、曝光度以及解析度,当前捕获图片的各项可视化数据为当前捕获图片的最大噪声幅值、噪声类型数量、背景面积占比以及各个像素点分别对应的各份亮度数值的均值,从而为各种图像处理的次序分析提供关键的基础信息;
13、第三处发明构思:用于执行各种图像处理的次序分析的极限学习机神经网络模型的结构为针对性设计的结构,具体为引入训练映射装置用于对极限学习机神经网络进行多次训练动作以获得完成多次训练动作后的极限学习机神经网络并作为极限学习机神经网络模型输出。
技术特征:
1.一种固定交通环境视觉内容管理系统,其特征在于,所述系统包括:
2.如权利要求1所述的固定交通环境视觉内容管理系统,其特征在于:
3.如权利要求2所述的固定交通环境视觉内容管理系统,其特征在于,所述系统还包括:
4.如权利要求3所述的固定交通环境视觉内容管理系统,其特征在于:
5.如权利要求3所述的固定交通环境视觉内容管理系统,其特征在于:
6.如权利要求2所述的固定交通环境视觉内容管理系统,其特征在于,所述系统还包括:
7.如权利要求6所述的固定交通环境视觉内容管理系统,其特征在于:
8.如权利要求7所述的固定交通环境视觉内容管理系统,其特征在于:
9.如权利要求8所述的固定交通环境视觉内容管理系统,其特征在于:
技术总结
本发明涉及一种固定交通环境视觉内容管理系统,包括:定向获取设备,固定在火车站站台上方以获取并输出当前捕获图片;次序解析装置,设置在视觉监控端,用于基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值。通过本发明,能够基于定向获取设备的各项拍摄参数以及当前捕获图片的各项可视化数据采用极限学习机神经网络模型智能鉴定代表当前捕获图片在定向获取设备中被执行的各项图像处理的次序的二进制数值,从而明确了当前捕获图片被执行的各种图像处理的次序,帮助监控端执行原始图片的还原处理。
技术研发人员:吴良恒,马小明,张悦然
受保护的技术使用者:南京优宇旭科技有限公司
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!