一种基于蓝牙AOA定位的便携式定位系统及其方法与流程
本发明涉及蓝牙定位领域,尤其涉及到一种基于蓝牙aoa定位的便携式定位系统及其方法。
背景技术:
1、在蓝牙定位方法中,蓝牙aoa(angle of arrive)定位应用广泛。
2、在蓝牙aoa定位过程中,待定位设备发射一种特殊的调制信号,定位基站通过特殊排布的天线阵列接收调制信号,进而识别待定位设备相对定位基站的角度,从而进一步确定待定位设备相对定位基站的位置。
3、待定位设备需要具有在蓝牙基带中支持发射该特定调制信号的功能,定位基站需要根据接收的蓝牙数据,具备天线阵列的切换及扫描功能。
4、例如,申请号为202022664034.4的专利文件公开了一种基于蓝牙aoa定位技术的室内定位装置,包括:阵列天线模块、处理器模块,其中的阵列天线模块用于从天线端接收同一个终端的发射的多路固定频率的信号,并信号输出对应的i/q值;处理器模块用于控制阵列天线模块选择对应的天线接收终端信号,并基于蓝牙aoa定位技术根据阵列天线模块输出的i/q值计算终端和定位装置之间的夹角,换算出两者之间的距离。
5、上述技术方案只通过阵列天线模块和处理器模块即可实现准确的室内定位,基于蓝牙aoa定位技术定位精度高。
6、但是,由于部分被定位物品(例如可移动资产、宠物等)存在意外离开室内定位基站信号覆盖范围的情况,当定位设备不支持gps等室外定位功能时,人工找回存在一定困难。
7、因此,我们有必要对上述的现有技术进行改善,以克服上述缺陷。
技术实现思路
1、本发明的目的是提供一种基于蓝牙aoa定位的便携式定位系统及其方法,以解决现有技术中存在的问题。
2、本发明的上述技术目的是通过以下技术方案实现的:
3、一种基于蓝牙aoa定位的便携式定位系统,包括
4、蓝牙终端设备,其用于周期性发送蓝牙aoa定位信号;
5、便携式蓝牙定位基站,其用于接收蓝牙aoa定位信号,并通过嵌入式的蓝牙aoa定位算法解算接收到的蓝牙aoa定位信号的方位角和距离;
6、移动终端,其用于与便携式蓝牙定位基站通讯连接,将所需定位的蓝牙终端设备的信息发送给便携式蓝牙定位基站,并接收和显示便携式蓝牙定位基站反馈的蓝牙终端设备的角度和距离信息。
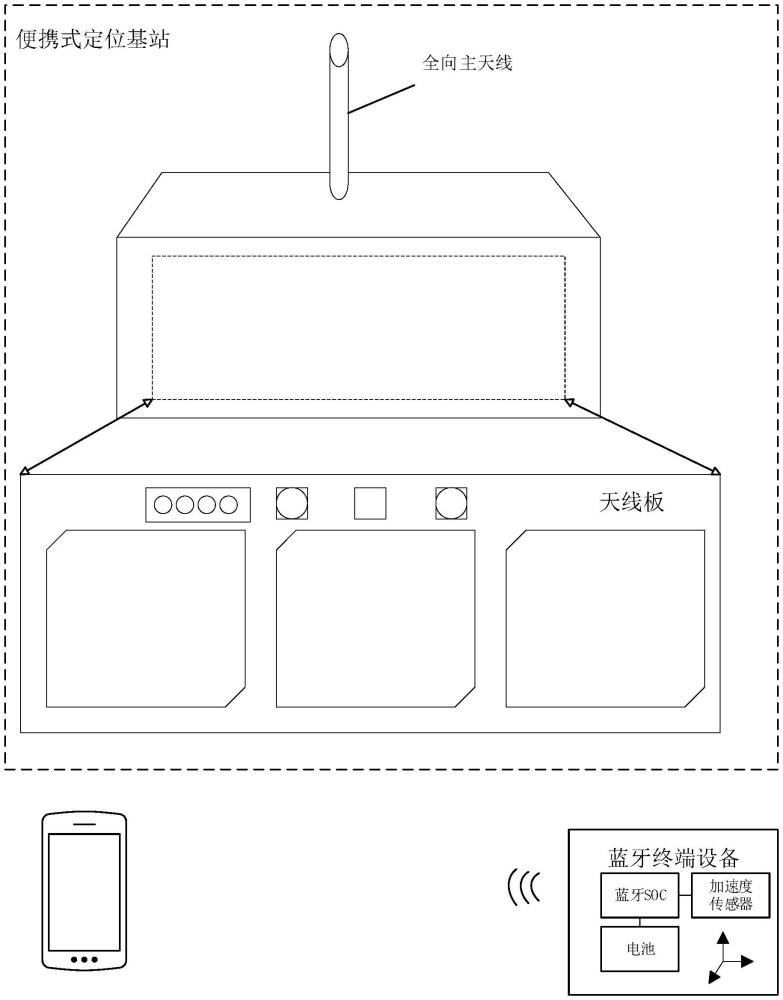
7、进一步的,所述便携式蓝牙定位基站包括电源模块、mcu、蓝牙芯片、姿态传感器和组合式天线;
8、所述电源模块包括可充电电池包和dc适配器,其通过供电控制芯片为mcu供电;所述mcu内嵌有用于解算蓝牙aoa定位信号的方位角和距离的蓝牙aoa定位算法,mcu通过端口与数据存储单元和姿态传感器连接,mcu还通过蓝牙芯片与组合式天线连接;
9、所述组合式天线包括全向主天线和若干天线板,天线板上设有2.4g频段微带线天线、射频通道切换芯片、ipex射频接口和若干供电和信号引脚,全向主天线与对应天线板的ipex射频接口连接。
10、一种基于蓝牙aoa定位的便携式定位方法,包括如下步骤:
11、1)将移动终端与便携式蓝牙定位基站通讯连接,并向其发送所需定位的蓝牙终端设备信息;
12、2)便携式蓝牙定位基站通过全向主天线进行蓝牙定位扫描,当扫描到目标的蓝牙终端设备发送的蓝牙aoa定位信号后,通过天线板采集蓝牙aoa定位信号的相位数据,并发送给mcu;
13、3)相位数据经过mcu的蓝牙aoa定位算法进行解算后获得目标的蓝牙终端设备的方位角和距离信息,并结合姿态传感器采集的姿态数据发送给移动终端;
14、4)移动终端在接收到便携式蓝牙定位基站的数据后,对比自身姿态数据对方位角进行转换,并在界面上显示蓝牙终端设备相对自身的位置信息。
15、进一步的,所述步骤3)中蓝牙终端设备的方位角的计算过程如下:
16、3.1)将所有相位数据根据所在的天线板进行分离;
17、3.2)利用相位数据计算出每个天线板接收信号的平均强度,并根据信号平均强度进行排序;
18、3.3)利用music算法对所有天线板方位角进行独立计算;
19、3.4)对平均强度最大的天线板计算得到的方位角与天线发现夹角进行判定;当夹角小于等于20°时,进入步骤3.5);当该夹角大于20°时,进入步骤3.6);
20、3.5)将平均强度最大的天线板以及其相邻两块天线板的相位数据带入公式(1)和公式(2);
21、
22、d=[n1·x1,n1·y1,n2·x2,n2·y2,n3·x3,n3·y3]t (2)
23、3.6)将平均强度最大的天线板以及其信号指向一侧的相邻天线板的相位数据带入公式(3)和公式(4);
24、
25、d=[n1·x1,n1·y1,n2·x2,n2·y2]t (4)
26、3.7)利用公式(5)、方程组(6)和(7)计算获得解向量m,解向量m的前两位数作为信号方位角的方向矢量作为算法的最终输出;
27、m=(gtg)-1gtd (5)
28、
29、
30、在进行连续定位时,输出方位角数据会带入卡尔曼滤波方程进行优化;
31、在上述公式中,ni为每块天线板接收信号的平均强度,uxi和uyi为方位角相对便携式蓝牙定位基站所在平面坐标系的方向矢量,x1和y1为天线板中心点相对便携式蓝牙定位基站所在平面坐标系的坐标点,m为方程组(6)和方程组(7)的解向量,公式(1)和公式(2)为方程组(6)构建的求解矩阵,公式(3)和公式(4)中为方程组(7)构建的求解矩阵。
32、进一步的,所述步骤3)中蓝牙终端设备的距离的计算过程如下:
33、通过全向主天线获取的信号rssi,基于对数路径损耗模型进行计算,获得蓝牙终端设备和便携式蓝牙定位基站的距离d;
34、所述对数路径损耗模型如公式(8)所示:
35、
36、其中,d0是标准参考距离,p0为与天线距离为d0的信号源采集到的信号rssi值;α为路径损耗指数,取值范围是1.6-1.8,根据实际场景测试后进行配置;
37、在进行连续定位时,距离数据会带入卡尔曼滤波方程进行优化。
38、综上所述,本发明具有以下有益效果:
39、通过采用便携式蓝牙定位基站、以及可与其进行通讯的移动终端,可实现室外无固定定位基站场景下对蓝牙定位终端设备的定位。
技术特征:
1.一种基于蓝牙aoa定位的便携式定位系统,其特征在于,包括
2.根据权利要求1所述的基于蓝牙aoa定位的便携式定位系统,其特征在于,所述便携式蓝牙定位基站包括电源模块、mcu、蓝牙芯片、姿态传感器和组合式天线;
3.一种基于蓝牙aoa定位的便携式定位方法,具有如权利要求1或2所述的便携式定位系统,其特征在于,包括如下步骤:
4.根据权利要求3所述的基于蓝牙aoa定位的便携式定位方法,其特征在于,所述步骤3)中蓝牙终端设备的方位角的计算过程如下:
5.根据权利要求3所述的基于蓝牙aoa定位的便携式定位方法,其特征在于,所述步骤3)中蓝牙终端设备的距离的计算过程如下:
技术总结
本发明公开了一种基于蓝牙AOA定位的便携式定位系统,包括蓝牙终端设备、便携式蓝牙定位基站和移动终端;移动终端向便携式蓝牙定位基站发送所需定位的蓝牙终端设备信息后,便携式蓝牙定位基站进行定位扫描,当扫描到目标的蓝牙终端设备发送的蓝牙AoA定位信号后,将相位数据经过MCU的蓝牙AoA定位算法进行解算后获得目标的蓝牙终端设备的方位角和距离信息,移动终端在接收到便携式蓝牙定位基站的数据,并在界面上显示蓝牙终端设备相对自身的位置信息。本发明通过采用便携式蓝牙定位基站、以及可与其进行通讯的移动终端,可实现室外无固定定位基站场景下对蓝牙定位终端设备的定位。
技术研发人员:马之远,张鹏程,方逸洲,仇正豪
受保护的技术使用者:上海仪电电子(集团)有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!