一种无线定位方法、设备、介质及产品
本申请涉及无线定位,特别是涉及一种无线定位方法、设备、介质及产品。
背景技术:
1、无线定位信号测量主要包括功率测量、时间测量和角度测量。功率测量包括三角定位和指纹定位,时间测量包括基于到达时间(time ofarrival,toa)和基于到达时间差(time deference ofarrival,tdoa)定位技术等,角度测量包括基于到达角(angleofarrival,aoa)和基于出发角(angle ofdeparture,aod)定位技术等。
2、然而,在现有技术中存在以下缺点:(1)若场景存在大面积且严重非视距的情况,或场景存在大面积强金属遮蔽的情况,定位系统的测距误差会达到米量级,终端移动轨迹的定位误差也会恶化至米量级或出现定位不连续现象;(2)定位系统不能根据时变信道状态实时反馈与处理,以尽可能减小定位误差,保障终端服务体验。
技术实现思路
1、本申请的目的是提供一种无线定位方法、设备、介质及产品,可通过基于本地认知反馈和基于云端认知反馈的双层认知反馈机制有效识别首达径并得到首达径时延,进而减小定位误差,保障终端服务体验。
2、为实现上述目的,本申请提供了如下方案:
3、第一方面,本申请提供了一种无线定位方法,所述无线定位方法包括:
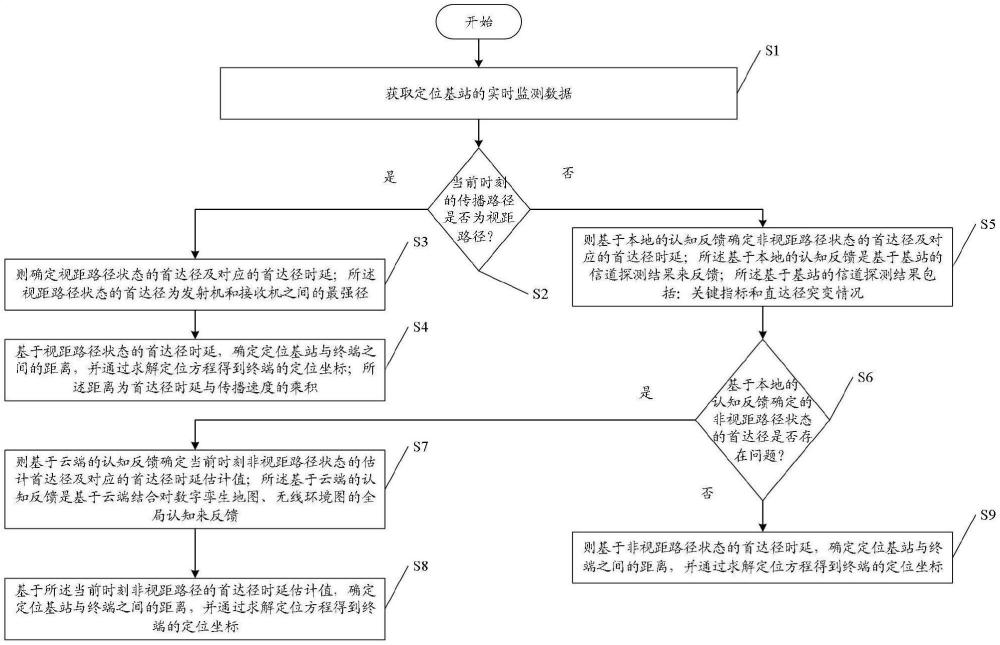
4、获取定位基站的实时监测数据。
5、根据所述定位基站的实时监测数据,判断当前时刻的传播路径是否为视距路径,得到第一判断结果。
6、若所述第一判断结果为是,则确定视距路径状态的首达径及对应的首达径时延;所述视距路径状态的首达径为发射机和接收机之间的最强径。
7、基于视距路径状态的首达径时延,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标;所述距离为首达径时延与传播速度的乘积。
8、若所述第一判断结果为否,则基于本地的认知反馈确定非视距路径状态的首达径及对应的首达径时延;所述基于本地的认知反馈是基于基站的信道探测结果来反馈;所述基于基站的信道探测结果包括:关键指标和直达径突变情况。
9、判断基于本地的认知反馈确定的非视距路径状态的首达径是否存在问题,得到第二判断结果。
10、若所述第二判断结果为否,则基于非视距路径状态的首达径时延,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标。
11、若所述第二判断结果为是,则基于云端的认知反馈确定当前时刻非视距路径状态的估计首达径及对应的首达径时延估计值;所述基于云端的认知反馈是基于云端结合对数字孪生地图、无线环境图的全局认知来反馈。
12、基于所述当前时刻非视距路径的首达径时延估计值,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标。
13、第二方面,本申请提供了一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述所述的无线定位方法。
14、第三方面,本申请提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述所述的无线定位方法。
15、第四方面,本申请提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述所述的无线定位方法。
16、根据本申请提供的具体实施例,本申请公开了以下技术效果:
17、本申请提供了一种无线定位方法、设备、介质及产品,首先,获取定位基站的实时监测数据;根据所述定位基站的实时监测数据,判断当前时刻的传播路径是否为视距路径,得到第一判断结果;若所述第一判断结果为是,则确定视距路径状态的首达径及对应的首达径时延;所述视距路径状态的首达径为发射机和接收机之间的最强径;基于视距路径状态的首达径时延,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标;所述距离为首达径时延与传播速度的乘积;若所述第一判断结果为否,则基于本地的认知反馈确定非视距路径状态的首达径及对应的首达径时延;所述基于本地的认知反馈是基于基站的信道探测结果来反馈;所述基于基站的信道探测结果包括:关键指标和直达径突变情况;其次,判断基于本地的认知反馈确定的非视距路径状态的首达径是否存在问题,得到第二判断结果;若所述第二判断结果为否,则基于非视距路径状态的首达径时延,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标;若所述第二判断结果为是,则基于云端的认知反馈确定当前时刻非视距路径状态的估计首达径及对应的首达径时延估计值;所述基于云端的认知反馈是基于云端结合对数字孪生地图、无线环境图的全局认知来反馈;基于所述当前时刻非视距路径的首达径时延估计值,确定定位基站与终端之间的距离,并通过求解定位方程得到终端的定位坐标。本申请所提方法在复杂电磁环境特别是严重非视距传播条件或多金属遮蔽环境下,能通过基于本地认知反馈和基于云端认知反馈的双层认知反馈机制有效识别首达径并得到首达径时延;同时,可以根据复杂电磁环境的时变信道状态,实时处理与反馈,以尽可能减小首达径识别误差,进而减小定位误差,保障终端服务体验。
技术特征:
1.一种无线定位方法,其特征在于,所述无线定位方法包括:
2.根据权利要求1所述的无线定位方法,其特征在于,所述视距路径状态首达径时延的计算公式为:
3.根据权利要求1所述的无线定位方法,其特征在于,基于本地的认知反馈确定非视距路径状态的首达径及对应的首达径时延,具体包括:
4.根据权利要求1所述的无线定位方法,其特征在于,通过调整定位基站或终端使用的信道channel,得到的非视距路径状态首达径的首达径时延的计算公式为:
5.根据权利要求1所述的无线定位方法,其特征在于,基于云端的认知反馈确定当前时刻非视距路径的首达径时延估计值的计算公式为:
6.根据权利要求1所述的无线定位方法,其特征在于,基于云端的认知反馈确定当前时刻非视距路径状态的估计首达径及对应的首达径时延估计值,具体包括:
7.根据权利要求6所述的无线定位方法,其特征在于,所述多径时延分辨率的计算公式为:
8.一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-7中任一项所述的无线定位方法。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的无线定位方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的无线定位方法。
技术总结
本申请公开了一种无线定位方法、设备、介质及产品,涉及无线定位领域,该方法包括:根据获取的定位基站的实时监测数据,判断当前时刻的传播路径是否为视距路径;若是,则确定视距路径状态的首达径及对应的首达径时延,并确定定位基站与终端之间的距离和终端的定位坐标;若否,则基于本地的认知反馈确定非视距路径状态的首达径及对应的首达径时延;判断基于本地的认知反馈确定的非视距路径状态的首达径是否存在问题;若否,则确定定位基站与终端之间的距离和终端的定位坐标;若是,则基于云端的认知反馈确定当前时刻非视距路径状态的估计首达径及对应的首达径时延估计值,并确定定位基站与终端之间的距离和终端的定位坐标。本申请可减小定位误差。
技术研发人员:赵友平,黄玉红
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!