一种舵机位置反馈装置的制作方法
本发明属于舵机设计,具体涉及一种舵机位置反馈装置。
背景技术:
1、增程滚转制导炮弹为利用传统火炮或者电磁炮发射的高速飞行自旋弹,通常采用双通道控制两两对称的鸭舵舵面同步控制,每对舵面实施同步偏转,利用制导炮弹绕其纵轴旋转和改变操纵机构的位置,可以在空间任意方向产生控制力。舵机位置反馈装置是舵机的重要功能部件,直接影响到舵机的指令执行,进而影响到全弹的飞行姿态控制和对目标的打击精度。由于制导炮弹为基于火炮或者电磁炮发射的高速自旋弹,过载冲击量在15000g~20000g。舵机位置反馈装置既需要满足大冲击过载条件和高速旋转条件的力学环境条件下产品不发生破坏,又需要性能指标可靠正常。传统的导电塑料式电位器远远不能满足20000g高冲击过载的要求。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种舵机位置反馈装置。本发明方案能够解决上述现有技术中存在的问题。
2、本发明的技术解决方案:
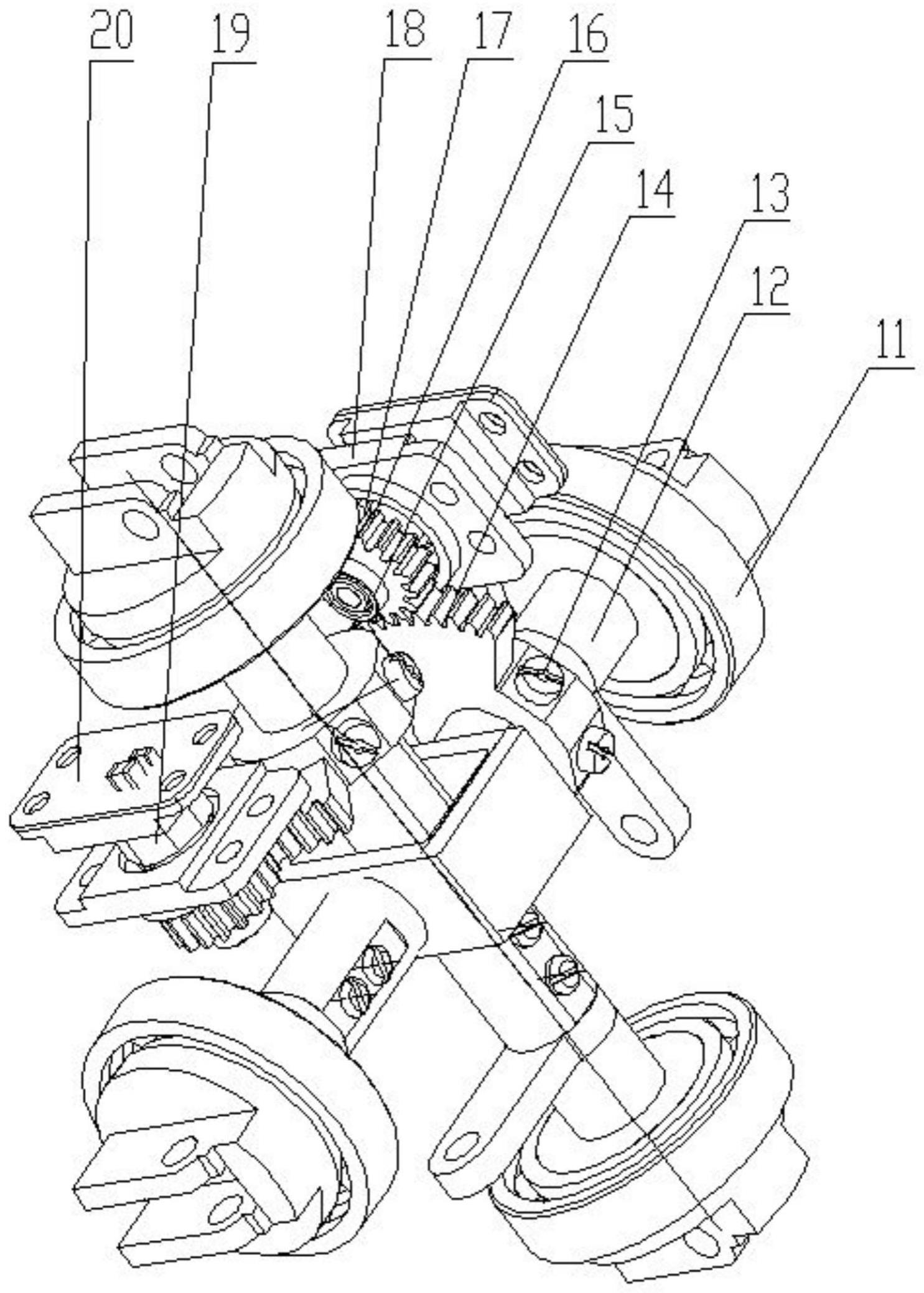
3、一种舵机位置反馈装置,包括扇形齿轮组件、反馈齿轮组件、磁铁组件和位移传感器电路组件,所述的扇形齿轮组件固定在舵机的输出轴上,所述的反馈齿轮组件中的反馈齿轮与所述的扇形齿轮组件中的扇形齿轮啮合,所述的磁铁组件与所述的反馈齿轮组件固连,保持同步转动,所述的位移传感器电路组件与所述磁铁组件中磁铁微距对齐,通过对磁铁运动状态的测量获得舵机输出轴的运行状态。
4、进一步的,所述的扇形齿轮组件包括扇形齿轮和扇形齿轮固定紧固钉,所述的扇形齿轮通过所述的扇形齿轮固定紧固钉安装在舵机的输出轴上,与输出轴同轴旋转。
5、进一步的,所述的反馈齿轮组件包括反馈齿轮、反馈齿轮小轴承、反馈齿轮支撑轴、反馈齿轮大轴承和反馈齿轮大轴承支撑板,所述的反馈齿轮小轴承、反馈齿轮、反馈齿轮大轴承依次安装在所述的反馈齿轮支撑轴上,所述的反馈齿轮大轴承安装在所述的反馈齿轮大轴承支撑板上,所述的反馈齿轮大轴承支撑板固定在舵机机体上。
6、进一步的,所述的磁铁组件包括磁铁和磁铁托,所述的磁铁托固定在所述的反馈齿轮支撑轴上,所述的磁铁固定在所述的磁铁托上。
7、进一步的,所述的位移传感器电路组件包括位移传感器电路和托架,所述的位移传感器电路固定在所述的托架上,可测量磁铁的位移状态,所述的托架固定在舵机主壳体上。
8、优选的,所述的托架为钛合金材料制造。
9、优选的,所述的磁铁与所述位移传感器电路的距离为1~1.5mm。
10、本发明与现有技术相比的有益效果:
11、(1)本发明结构简单,为非接触式测量,有效降低了冲击过程中活动部件对传感器的传递影响;
12、(2)本发明具有较高的抗过载冲击能力、高可靠性、高灵敏度、体积小等优势特点,制造成本较低,便于应用装备到增程制导火炮炮弹或者电磁炮弹等需大批量装备和战争中需大规模使用的武器装备。
技术特征:
1.一种舵机位置反馈装置,其特征在于,包括扇形齿轮组件、反馈齿轮组件、磁铁组件和位移传感器电路组件,所述的扇形齿轮组件固定在舵机的输出轴上,所述的反馈齿轮组件中的反馈齿轮与所述的扇形齿轮组件中的扇形齿轮啮合,所述的磁铁组件与所述的反馈齿轮组件固连,保持同步转动,所述的位移传感器电路组件与所述磁铁组件中磁铁微距对齐,通过对磁铁运动状态的测量获得舵机输出轴的运行状态。
2.根据权利要求1所述的一种舵机位置反馈装置,其特征在于,所述的扇形齿轮组件包括扇形齿轮和扇形齿轮固定紧固钉,所述的扇形齿轮通过所述的扇形齿轮固定紧固钉安装在舵机的输出轴上,与输出轴同轴旋转。
3.根据权利要求1所述的一种舵机位置反馈装置,其特征在于,所述的反馈齿轮组件包括反馈齿轮、反馈齿轮小轴承、反馈齿轮支撑轴、反馈齿轮大轴承和反馈齿轮大轴承支撑板,所述的反馈齿轮小轴承、反馈齿轮、反馈齿轮大轴承依次安装在所述的反馈齿轮支撑轴上,所述的反馈齿轮大轴承安装在所述的反馈齿轮大轴承支撑板上,所述的反馈齿轮大轴承支撑板固定在舵机机体上。
4.根据权利要求1所述的一种舵机位置反馈装置,其特征在于,所述的磁铁组件包括磁铁和磁铁托,所述的磁铁托固定在所述的反馈齿轮支撑轴上,所述的磁铁固定在所述的磁铁托上。
5.根据权利要求1所述的一种舵机位置反馈装置,其特征在于,所述的位移传感器电路组件包括位移传感器电路和托架,所述的位移传感器电路固定在所述的托架上,可测量磁铁的位移状态,所述的托架固定在舵机主壳体上。
6.根据权利要求5所述的一种舵机位置反馈装置,其特征在于,所述的托架为钛合金材料制造。
7.根据权利要求1所述的一种舵机位置反馈装置,其特征在于,所述的磁铁与所述位移传感器电路的距离为1~1.5mm。
技术总结
本发明提供一种舵机位置反馈装置,包括扇形齿轮组件、反馈齿轮组件、磁铁组件和位移传感器电路组件,所述的扇形齿轮组件固定在舵机的输出轴上,所述的反馈齿轮组件中的反馈齿轮与所述的扇形齿轮组件中的扇形齿轮啮合,所述的磁铁组件与所述的反馈齿轮组件固连,保持同步转动,所述的位移传感器电路组件与所述磁铁组件中磁铁微距对齐,通过对磁铁运动状态的测量获得舵机输出轴的运行状态。本发明具有较高的抗过载冲击能力、高可靠性、高灵敏度、体积小等优势特点,制造成本较低,便于应用装备到增程制导火炮炮弹或者电磁炮弹等需大批量装备和战争中需大规模使用的武器装备。
技术研发人员:冯永星,黄建,张新华,何平,刘涛,程志家,王永乐,熊官送,胡兴雷,李晋生,郑美媛,王昆,王连丛
受保护的技术使用者:北京自动化控制设备研究所
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!