基于地面发射导弹的图像导引头模板采集系统的制作方法
本发明涉及控制,更具体地,涉及一种基于地面发射导弹的图像导引头模板采集一体化系统。
背景技术:
1、目前,图像导引头在导弹制导领域广泛应用,模板匹配作为图像导引头重要捕获手段之一。对于空地导弹和空空导弹来说,制作模板通常由载机的光电吊舱完成,较为方便。对于地面发射的导弹来说,拍摄模板比较困难,而且大多数空地导弹和空空导弹的科研试验都是地面发射的,所以针对于地面发射导弹的图像导引头模板采集成为一个空白。
2、目前了解到的采集方法是无人机搭载红外相机进行拍摄,但是红外相机没有隔离作用,无人机的抖动对图像质量影响非常严重,而且地面控制平台只能控制无人机飞行,无法对红外相机的拍摄角度进行控制,需要起飞前提前设定好红外相机的拍摄角度,多数情况下,目标不在红外相机视场内,需要调节无人机姿态寻找目标,使用极为不便。红外相机、无人机、图像遥测设备为分立系统,彼此之间耦合度差,使用体验很差。此外,忌惮于地面采集模板的复杂性,部分厂商放弃地面验证模板匹配的功能,待到机载发射时候再进行验证。所以,基于现状,需要一台一体化设备解决地面发射导弹的图像导引头模板采集的问题。
3、公开于本发明背景技术部分的信息仅仅旨在加深对本发明的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明填补了现有技术空白,提供一种基于地面发射导弹的图像导引头模板采集一体化系统。将无人机、数据链设备、地面站结合成一套系统,通过一套地面站软件控制,实现无人机挂载导引头对目标进行拍摄。
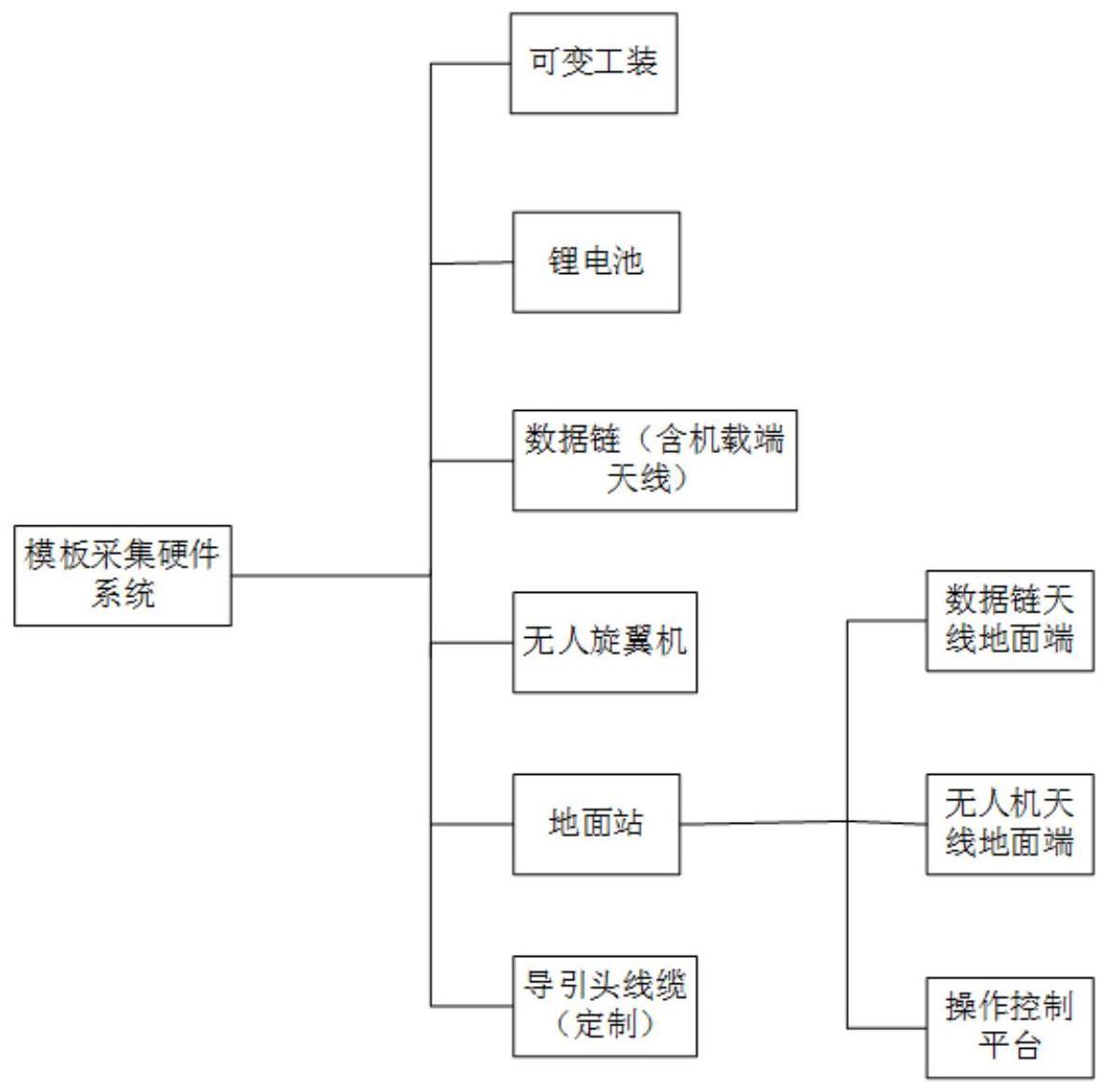
2、本发明提供一种基于地面发射导弹的图像导引头模板采集系统,包括:
3、导引头,用于拍摄模板图像;
4、无人机,用于将所述引导头搭载至预定地域;
5、数据链设备,搭载在无人机上,所述数据链设备与所述导引头和地面站无线通信连接;
6、地面站,包括操作控制平台、数据链天线地面端和无人机天线地面端,所述操作控制平台通过数据链天线地面端与所述数据链设备通信,通过无人机天线地面端与所述无人机通信。
7、进一步地,所述数据链设备包括:
8、数据链天线机载端,与所述数据链天线地面端通信;
9、收发主机,通过所述数据链天线机载端接收地面站的控制指令,将导引头的模板图像下传至所述地面站;
10、图像压缩模块,用于将所述导引头下传的模板图像进行压缩;
11、指令透传模块,将地面站的操作控制平台上传的指令透传给导引头;
12、数据链通信模块,用于与地面站通信。
13、进一步地,所述操作控制平台包括:
14、飞控机模拟模块,用于模拟飞控机,将飞控机指令通过数据链设备透传至所述导引头;
15、地面站通信模块,用于与所述无人机和数据链设备通信;
16、无人机控制模块,用于对所述无人机的飞行进行控制;
17、图像解压缩模块,用于将所述数据链设备下传的模板图像进行解压缩;
18、图像解析模块,用于将解压缩后的模板图像数据进行解析并显示。
19、进一步地,所述操作控制平台还包括:
20、人机交互模块,用于与操作员信息交互;
21、航点预置模块,模板图像采集任务前,将模板采集坐标位置预置至无人机;
22、存储模块,用于存储采集的模板图像。
23、进一步地,所述无人机控制模块包括手动模式和自动模式;手动模式为操作员通过遥控控制无人机的飞行;自动模式为无人机按照预设航点自主飞行。
24、进一步地,所述无人机包括:
25、飞行指令模块,用于生成飞行指令;
26、飞行控制模块,接收所述飞行指令模块的飞行指令,用于无人机的飞行控制;
27、系统安全模块,当无人机电量不足或者飞出航程范围等情况时,所述系统安全模块主动介入无人机控制权,立即返航。
28、进一步地,所述飞行指令模块结合预置航点位置、无人机自身位置以及地面站控制要求形成飞行指令,作为输入飞行控制模块的飞行指令。
29、进一步地,还包括可变工装,用于固定所述导引头、数据链设备和数据链天线机载端。
30、进一步地,所述可变工装适用于120mm~180mm弹径的导引头。
31、进一步地,所述无人机为多旋翼无人机平台,还包括导航模块和无人机通信模块。
32、本发明与现有技术相比的优点在于:
33、1、本发明用无人机挂载客户提供的导引头拍摄目标,拍摄过程中导引头可以通过地面上传的点选指令捕获目标,从根本解决了隔离无人机抖动的问题,拍摄模板质量得到保证。可用靶试试验的导引头挂载无人机拍摄模板,近一步保证模板图像与靶试试验图像的一致性。
34、2、本发明地面站具备模拟飞控机的功能,且该模块可以为预留模块,用户可以根据自己导引头的通讯协议进行二次开发,实现对导引头框架角的控制以及点选指令的上传等功能,解决了拍摄过程中目标不在视场内的问题。
35、3、本发明通过地面站的飞控机模拟模块、数据链的指令透传模块完全实现飞控机的功能,避免挂载飞控机上天,既减轻无人机的挂载重量,又方便灵活便于导引头操控。
36、4、本发明为一体化开发,将无人机、数据链设备、地面站结合成一套系统,互相耦合紧密,使用便捷、操作简单。
37、5、本发明针对当前主流不同尺寸的导引头具有适配性;地面站的飞控机模拟模块和图像解析模块可以为预留模块,提供给不同用户进行二次开发,保证该软件系统的普适性。
38、本发明的方法和装置具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:
1.一种基于地面发射导弹的图像导引头模板采集系统,其特征在于,包括:
2.根据权利要求1所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述数据链设备包括:
3.根据权利要求1所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述操作控制平台包括:
4.根据权利要求3所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述操作控制平台还包括:
5.根据权利要求3所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述无人机控制模块包括手动模式和自动模式;手动模式为操作员通过遥控控制无人机的飞行;自动模式为无人机按照预设航点自主飞行。
6.根据权利要求1所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述无人机包括:
7.根据权利要求6所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述飞行指令模块结合预置航点位置、无人机自身位置以及地面站控制要求形成飞行指令,作为输入飞行控制模块的飞行指令。
8.根据权利要求1所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,还包括可变工装,用于固定所述导引头、数据链设备和数据链天线机载端。
9.根据权利要8所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述可变工装适用于120mm~180mm弹径的导引头。
10.根据权利要求6所述的基于地面发射导弹的图像导引头模板采集系统,其特征在于,所述无人机为多旋翼无人机平台,还包括导航模块和无人机通信模块。
技术总结
本申请公开了一种基于地面发射导弹的图像导引头模板采集系统,包括:导引头,用于拍摄模板图像;无人机,用于将所述引导头搭载至预定地域;数据链设备,搭载在无人机上,所述数据链设备与所述导引头和地面站通信连接;地面站,包括操作控制平台、数据链天线地面端和无人机天线地面端,所述操作控制平台通过数据链天线地面端与所述数据链设备通信,通过无人机天线地面端与所述无人机通信。该系统可适配多种不同型号的导引头,具有普适性,避免一种型号修改一次系统的冗余工作,使得模板采集工作更简单、更易操作,采用客户提供的导引头拍摄模板,从根本解决了模板图像与靶试试验图像的一致性问题。
技术研发人员:何君,张新伟,舒胜,彭勃,郎野
受保护的技术使用者:彩虹无人机科技有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!