一种无人移动靶车的制作方法
本发明涉及靶车,具体为一种无人移动靶车。
背景技术:
1、目前,国内外大多数移动靶车,主要分为以下几种:第一种轨道式靶车,轨道式靶车只能按照轨道直线移动,且场地是固定的轨道长度有限,缺点:若想变更行驶路线就得重新铺设轨道,花费时间长、代价高。第二种遥控无人靶车、遥控无人靶车采用的是远程遥控方法,靶车在行驶过程中时刻对靶车的行驶状态进行控制。缺点是:远程遥控存在延迟问题靶车行驶速度低、而且远程遥控端靶车数据交互不畅时,靶车将失去控制,存在很高安全性问题。第三种将市场上已有的无人驾驶汽车例如:谷歌无人驾驶汽车及百度无人驾驶汽车改装为无人靶车,但现有的无人移动靶车对于靶标的朝向调节不够方便,靶车在移动时朝向只能是相对的两侧,在需要对另外两侧进行靶标朝向调节时需要靶车整车调节行驶方向,在训练时靶车的操控性不够好,反复调节靶车的运动方向影响效果。
技术实现思路
1、本发明的目的在于提供一种无人移动靶车,以解决上述背景技术中提出的问题。
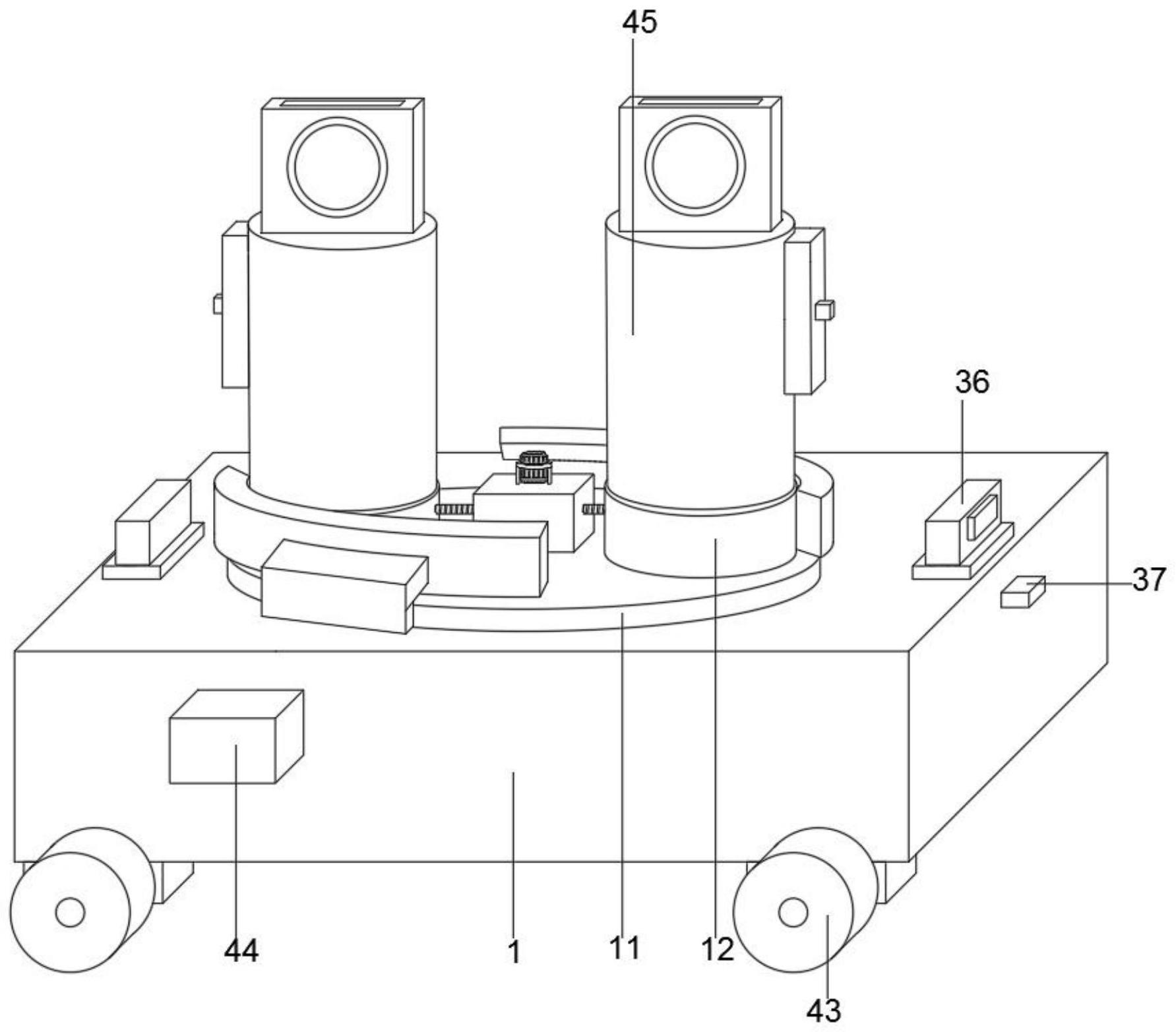
2、为实现上述目的,本发明提供如下技术方案:一种无人移动靶车,包括支撑底座,所述支撑底座的顶部转动连接有一号转动盘,所述支撑底座的内部设有伺服电机,所述伺服电机的输出端与一号转动盘固定连接,所述一号转动盘的顶部对称固定连接有两个固定座,所述固定座的顶部固定连接有二号转动筒,所述二号转动筒的内部活动连接有二号转动盘,所述二号转动盘的顶部安装有安装座,所述安装座的外侧开设有环形限位槽,所述安装座的顶部通过螺栓安装有安装靶板,所述斜边卡板的内部活动连接有与环形限位槽配合的斜边卡板,所述斜边卡板与二号转动盘滑动连接,所述二号转动盘的底部固定连接有二号转动杆,所述二号转动筒的内部转动连接有一号转动筒,所述一号转动筒与二号转动杆滑动连接,所述二号转动杆与二号转动筒转动连接,所述一号转动筒的外侧固定连接有齿轮,两个所述固定座的外侧均活动连接有连接框,所述连接框的内侧固定连接有四分之一齿圈,所述四分之一齿圈与齿轮啮合连接,所述四分之一齿圈与固定座滑动连接,所述连接框的外侧固定连接有固定架,所述固定架与支撑底座滑动连接,所述二号转动杆的底部固定连接有一号转动杆,所述一号转动杆位于一号转动筒的内侧,所述一号转动杆与固定座转动连接,所述支撑底座的内部转动连接有一号调节丝杆,所述一号调节丝杆的外侧螺纹连接有调节支盘,所述调节支盘的外侧对称活动连接有两个侧滑板,所述侧滑板的内部滑动连接有限位滑板,所述限位滑板的顶部与一号转动杆转动连接。
3、作为优选,所述一号转动盘的顶部固定连接有支撑箱,所述支撑箱的内部转动连接有转动套筒,所述转动套筒的内部对称螺纹连接有两个二号调节丝杆,所述二号调节丝杆的一端与固定座固定连接,所述转动套筒的外侧固定连接有蜗轮,所述支撑箱的内部转动连接有蜗杆,所述蜗杆与蜗轮啮合连接,所述支撑箱的顶部设有二号电机,所述二号电机的输出端与蜗杆固定连接。
4、作为优选,所述二号转动筒的一侧固定连接有连接侧箱,所述斜边卡板与连接侧箱活动连接,所述斜边卡板的一侧滑动连接有滑动框,所述滑动框与连接侧箱滑动连接,所述斜边卡板的内部滑动连接有二号限位杆,所述二号限位杆与滑动框固定连接,所述滑动框的一侧对称设有弹簧,所述弹簧的一端与连接侧箱固定连接,所述滑动框的一侧固定连接有拉杆,所述拉杆与连接侧箱滑动连接。
5、作为优选,所述调节支盘的外侧对称开设有两个t型滑槽,所述t型滑槽的内部滑动连接有t型滑块,所述t型滑块的一侧与侧滑板固定连接。
6、作为优选,所述二号转动杆的外侧对称固定连接有两个限位滑块,所述一号转动筒的内侧对称开设有两个与限位滑块配合的限位滑槽,所述限位滑块与限位滑槽滑动连接。
7、作为优选,所述安装靶板的内部滑动连接有升降板,所述升降板的顶部安装有升降靶板,所述安装靶板的内部设有气缸,所述气缸的输出端与升降板固定连接。
8、作为优选,所述调节支盘的内部对称滑动连接有一号限位杆,所述一号限位杆与支撑底座固定连接,所述支撑底座的内部设有一号电机,所述一号电机的输出端与一号调节丝杆固定连接。
9、作为优选,所述支撑底座的底部对称设有两个驱动轮。
10、作为优选,所述支撑底座的顶部对称设有两个图像采集摄像头,所述支撑底座的两侧均设有红外测距仪。
11、作为优选,所述支撑底座的内部设有蓄电池,所述支撑底座的一侧设有控制器,所述一号电机、二号电机、图像采集摄像头、红外测距仪、气缸、蓄电池和驱动轮均与控制器电性连接。
12、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
13、与现有技术相比,本发明的有益效果是:通过加入了一号转动盘,实现了在伺服电机的输出端带动一号转动盘转动九十度,在转动时会带动固定座、二号转动筒进行整体转动,在固定座移动时带动齿轮移动,齿轮与四分之一齿圈啮合,四分之一齿圈的位置固定,即可在固定座移动位置时带动齿轮进行转动,齿轮转动时带动一号转动筒、二号转动杆进行转动,将安装靶板和升降靶板进行角度调节处理,对不同靶标的朝向角度进行调节处理,通过加入了蜗杆、蜗轮,实现了在蜗杆转动时带动蜗轮进行转动,蜗轮转动时带动转动套筒进行转动,转动套筒转动时带动两个二号调节丝杆进行伸出,对固定座和顶部的结构进行整体间距调节处理。
技术特征:
1.一种无人移动靶车,其特征在于,包括支撑底座(1),所述支撑底座(1)的顶部转动连接有一号转动盘(11),所述支撑底座(1)的内部设有伺服电机(46),所述伺服电机(46)的输出端与一号转动盘(11)固定连接,所述一号转动盘(11)的顶部对称固定连接有两个固定座(12),所述固定座(12)的顶部固定连接有二号转动筒(45),所述二号转动筒(45)的内部活动连接有二号转动盘(21),所述二号转动盘(21)的顶部安装有安装座(22),所述安装座(22)的外侧开设有环形限位槽(23),所述安装座(22)的顶部通过螺栓安装有安装靶板(38),所述二号转动筒(45)的内部活动连接有与环形限位槽(23)配合的斜边卡板(24),所述斜边卡板(24)与二号转动盘(21)滑动连接,所述二号转动盘(21)的底部固定连接有二号转动杆(20),所述二号转动筒(45)的内部转动连接有一号转动筒(13),所述一号转动筒(13)与二号转动杆(20)滑动连接,所述二号转动杆(20)与二号转动筒(45)转动连接,所述一号转动筒(13)的外侧固定连接有齿轮(14),两个所述固定座(12)的外侧均活动连接有连接框(16),所述连接框(16)的内侧固定连接有四分之一齿圈(15),所述四分之一齿圈(15)与齿轮(14)啮合连接,所述四分之一齿圈(15)与固定座(12)滑动连接,所述连接框(16)的外侧固定连接有固定架(17),所述固定架(17)与支撑底座(1)滑动连接,所述二号转动杆(20)的底部固定连接有一号转动杆(10),所述一号转动杆(10)位于一号转动筒(13)的内侧,所述一号转动杆(10)与固定座(12)转动连接,所述支撑底座(1)的内部转动连接有一号调节丝杆(4),所述一号调节丝杆(4)的外侧螺纹连接有调节支盘(2),所述调节支盘(2)的外侧对称活动连接有两个侧滑板(6),所述侧滑板(6)的内部滑动连接有限位滑板(9),所述限位滑板(9)的顶部与一号转动杆(10)转动连接。
2.根据权利要求1所述的一种无人移动靶车,其特征在于,所述一号转动盘(11)的顶部固定连接有支撑箱(30),所述支撑箱(30)的内部转动连接有转动套筒(31),所述转动套筒(31)的内部对称螺纹连接有两个二号调节丝杆(35),所述二号调节丝杆(35)的一端与固定座(12)固定连接,所述转动套筒(31)的外侧固定连接有蜗轮(32),所述支撑箱(30)的内部转动连接有蜗杆(33),所述蜗杆(33)与蜗轮(32)啮合连接,所述支撑箱(30)的顶部设有二号电机(34),所述二号电机(34)的输出端与蜗杆(33)固定连接。
3.根据权利要求2所述的一种无人移动靶车,其特征在于,所述二号转动筒(45)的一侧固定连接有连接侧箱(27),所述斜边卡板(24)与连接侧箱(27)活动连接,所述斜边卡板(24)的一侧滑动连接有滑动框(25),所述滑动框(25)与连接侧箱(27)滑动连接,所述斜边卡板(24)的内部滑动连接有二号限位杆(26),所述二号限位杆(26)与滑动框(25)固定连接,所述滑动框(25)的一侧对称设有弹簧(28),所述弹簧(28)的一端与连接侧箱(27)固定连接,所述滑动框(25)的一侧固定连接有拉杆(29),所述拉杆(29)与连接侧箱(27)滑动连接。
4.根据权利要求3所述的一种无人移动靶车,其特征在于,所述调节支盘(2)的外侧对称开设有两个t型滑槽(8),所述t型滑槽(8)的内部滑动连接有t型滑块(7),所述t型滑块(7)的一侧与侧滑板(6)固定连接。
5.根据权利要求4所述的一种无人移动靶车,其特征在于,所述二号转动杆(20)的外侧对称固定连接有两个限位滑块(18),所述一号转动筒(13)的内侧对称开设有两个与限位滑块(18)配合的限位滑槽(19),所述限位滑块(18)与限位滑槽(19)滑动连接。
6.根据权利要求5所述的一种无人移动靶车,其特征在于,所述安装靶板(38)的内部滑动连接有升降板(39),所述升降板(39)的顶部安装有升降靶板(41),所述安装靶板(38)的内部设有气缸(40),所述气缸(40)的输出端与升降板(39)固定连接。
7.根据权利要求6所述的一种无人移动靶车,其特征在于,所述调节支盘(2)的内部对称滑动连接有一号限位杆(3),所述一号限位杆(3)与支撑底座(1)固定连接,所述支撑底座(1)的内部设有一号电机(5),所述一号电机(5)的输出端与一号调节丝杆(4)固定连接。
8.根据权利要求7所述的一种无人移动靶车,其特征在于,所述支撑底座(1)的底部对称设有两个驱动轮(43)。
9.根据权利要求8所述的一种无人移动靶车,其特征在于,所述支撑底座(1)的顶部对称设有两个图像采集摄像头(36),所述支撑底座(1)的两侧均设有红外测距仪(37)。
10.根据权利要求9所述的一种无人移动靶车,其特征在于,所述支撑底座(1)的内部设有蓄电池(42),所述支撑底座(1)的一侧设有控制器(44),所述一号电机(5)、二号电机(34)、图像采集摄像头(36)、红外测距仪(37)、气缸(40)、蓄电池(42)和驱动轮(43)均与控制器(44)电性连接。
技术总结
本发明公开了一种无人移动靶车,包括支撑底座,支撑底座的顶部转动连接有一号转动盘,支撑底座的内部设有伺服电机,伺服电机的输出端与一号转动盘固定连接,一号转动盘的顶部对称固定连接有两个固定座,本发明的有益效果是:通过加入了一号转动盘,实现了在伺服电机的输出端带动一号转动盘转动九十度,在转动时会带动固定座、二号转动筒进行整体转动,在固定座移动时带动齿轮移动,齿轮与四分之一齿圈啮合,四分之一齿圈的位置固定,即可在固定座移动位置时带动齿轮进行转动,齿轮转动时带动一号转动筒、二号转动杆进行转动,将安装靶板和升降靶板进行角度调节处理,对不同靶标的朝向角度进行调节处理。
技术研发人员:陈波,韩云武,毛柳倩
受保护的技术使用者:东莞东晟装备科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!