一种基于光学的侦察系统
本申请涉及侦察,尤其涉及一种基于光学的侦察系统。
背景技术:
1、在战场中进行无人值守/搜索/打击将成为未来作战的一种重要方式,便携式武器站配备智能瞄具,可实现在视野范围内的快速反应,精准打击能力强,将成为未来战场重要的作战力量组成,而士兵作为遥控操控者远离一线战场,只能局限在较小的作战视野范围内,而对战场环境下广域范围内的其他威胁目标无法迅速精准高效捕捉,加之以城市战场为代表的战场环境,建筑物等遮挡视线,也给便携式武器站目标搜寻锁定带来了巨大的挑战,即便配备高性能弹道计算机或智能观瞄系统,也无法完全适应立体大空域的作战场景。同时,战场环境下敌方目标往往依托地形地利或者借助伪装装备进行伪装,猝不及防向我方发起攻击,当前的作战手段尚无有效应对这一类情况,给我方作战人员带来巨大的威胁,若能在高烈度战场环境下借助装备快速对较远距离和较大范围内的敌方目标实现快速定位和锁定,将极大增强我方的综合作战实力。结合未来战争发展趋势,如何在高烈度作战节奏下帮助辅助我方士兵操控员在复杂战场环境下更快完成对敌方目标的捕获和位置方位的获取,实现对抗作战过程中的料敌于先,是提高我方作战人员精准打击作战和战场生存能力的关键,应用极其广泛且需求十分迫切。
技术实现思路
1、本申请实施例提供一种基于光学的侦察系统。
2、本申请提供如下技术方案:
3、一种基于光学的侦察系统,包括:
4、壳体;
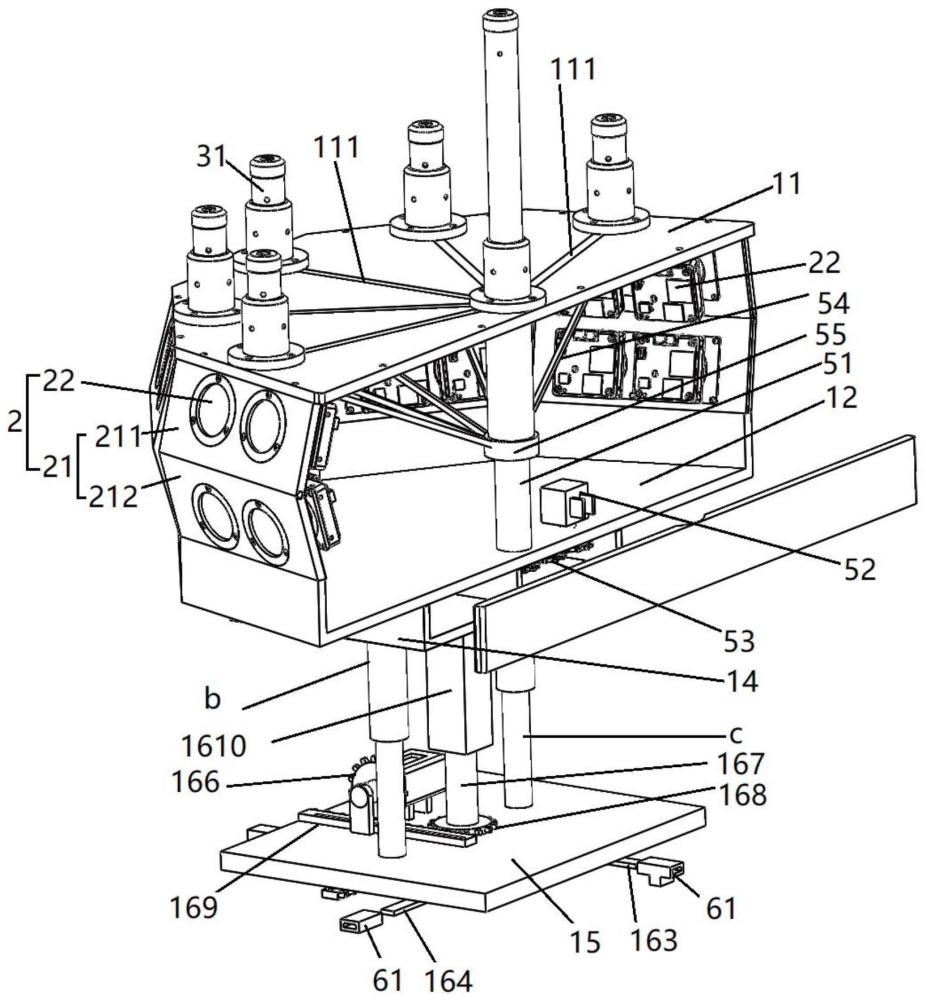
5、光学探测组件,所述光学探测组件设置于所述壳体,所述光学探测组件包括多个摄像装置,各所述摄像装置沿所述壳体的周向依次间隔排列,且所述摄像装置连接于所述壳体,所述摄像装置包括载体件和摄像头,所述载体件包括上侧板和所述下侧板,所述上侧板和所述下侧板可活动地连接,所述上侧板和所述下侧板均与所述壳体可活动地连接,所述上侧板和所述下侧板上分别设置有若干摄像头,光学探测组件用于探测目标物的光学位置坐标;
6、驱动机构,所述驱动机构设置于所述壳体,所述驱动机构与各所述摄像装置的上侧板和下侧板传动连接,以驱动所述上侧板和下侧板相对运动,调节所述上侧板和下侧板上摄像头的总垂直视场角度。
7、可选地,所述壳体包括顶板和底板;
8、所述顶板和底板间隔设置;
9、所述上侧板背离所述下侧板的一端铰接于所述顶板;
10、所述下侧板背离所述上侧板的一端铰接于所述底板;
11、所述驱动机构与所述顶板和底板连接,驱动所述顶板和底板相对靠近或反向远离,以调节各摄像装置的上侧板和下侧板的夹角。
12、可选地,所述驱动机构包括驱动杆;
13、所述顶板上设置螺纹槽;
14、所述驱动杆可转动地贯穿所述底板设置,所述驱动杆具有螺纹段,所述螺纹段贯穿所述螺纹槽,且螺纹连接于所述螺纹槽;
15、所述驱动杆旋转,驱动所述顶板升降运动,以调节各摄像装置的上侧板和下侧板的夹角。
16、可选地,所述底板背离所述顶板的一面连接有底壳;
17、所述底壳和所述底板之间形成容纳腔;
18、所述驱动机构包括驱动组件,所述驱动组件至少部分设置于所述容纳腔内,所述驱动组件与所述驱动杆传动连接,以驱动所述驱动杆正/反向旋转。
19、可选地,所述驱动组件包括第一电机和轮系;
20、所述轮系均设置于所述容纳腔内,所述轮系的各所述齿轮依次设置,相邻的齿轮相啮合,所述轮系一端的齿轮与所述驱动杆相连接,所述第一电机与所述轮系另一端的齿轮相连接。
21、可选地,基于光学的侦察系统包括:
22、声学探测组件,所述声学探测组件设置于所述壳体,所述声学探测组件用于探测目标物的声学位置坐标;
23、控制组件,所述控制组件设置于所述壳体,所述控制组件分别与所述光学探测组件和所述声学探测组件电连接,用于根据所述光学位置坐标和声学位置坐标确定最终坐标。
24、可选地,所述顶板、底板和各所述摄像装置之间形成空腔,所述控制组件设置于所述空腔内;
25、相邻的摄像装置的载体件之间形成连通所述空腔的缝隙。
26、可选地,基于光学的侦察系统包括弹性件;
27、所述弹性件分别连接相邻的两个载体件;
28、所述弹性件覆盖所述缝隙,或所述弹性件将所述缝隙分割形成多个孔。
29、可选地,基于光学的侦察系统,其特征在于,包括压条,所述压条可拆卸地连接于所述载体件;
30、所述弹性件包括多个弹性条,各所述弹性条沿所述缝隙依次设置;
31、所述弹性条的一端压紧于一所述载体件和相应的压条之间,所述弹性条的另一端压紧于相邻的另一载体件和相应的压条之间。
32、可选地,相邻两个载体件之间形成的缝隙中,在由中部分别向顶板和底板的方向上,所述缝隙的宽度逐渐减小;
33、在由所述缝隙的中部分别至顶板和底板的方向上,各所述弹性条的自然长度逐渐减小。
技术特征:
1.一种基于光学的侦察系统,其特征在于,包括:
2.根据权利要求1所述基于光学的侦察系统,其特征在于,所述壳体包括顶板和底板;
3.根据权利要求2所述基于光学的侦察系统,其特征在于,所述驱动机构包括驱动杆;
4.根据权利要求3所述基于光学的侦察系统,其特征在于,所述底板背离所述顶板的一面连接有底壳;
5.根据权利要求4所述基于光学的侦察系统,其特征在于,所述驱动组件包括第一电机和轮系;
6.根据权利要求5所述基于光学的侦察系统,其特征在于,包括:
7.根据权利要求6所述基于光学的侦察系统,其特征在于,所述顶板、底板和各所述摄像装置之间形成空腔,所述控制组件设置于所述空腔内;
8.根据权利要求7所述基于光学的侦察系统,其特征在于,包括弹性件;
9.根据权利要求8所述基于光学的侦察系统,其特征在于,包括压条,所述压条可拆卸地连接于所述载体件;
10.根据权利要求9所述基于光学的侦察系统,其特征在于,相邻两个载体件之间形成的缝隙中,在由中部分别向顶板和底板的方向上,所述缝隙的宽度逐渐减小;
技术总结
本申请实施例提供一种基于光学的侦察系统,包括:壳体、光学探测组件和驱动机构。光学探测组件设置于所述壳体,所述光学探测组件包括多个摄像装置,各所述摄像装置沿所述壳体的周向依次间隔排列,且所述摄像装置连接于所述壳体,所述摄像装置包括载体件和摄像头,所述载体件包括上侧板和所述下侧板,所述上侧板和所述下侧板可活动地连接,所述上侧板和所述下侧板均与所述壳体可活动地连接,上侧板和所述下侧板上分别设置有若干摄像头,光学探测组件用于探测目标物的光学位置坐标。驱动机构设置于壳体,所述驱动机构与各所述摄像装置的上侧板和下侧板传动连接,以驱动上侧板和下侧板相对运动,调节所述上侧板和下侧板上摄像头的总垂直视场角度。
技术研发人员:冯斌,章浩飞,苏炜,刘蓉,尚小燕
受保护的技术使用者:西安工业大学
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!