一种高旋飞行体尾部变外形制导控制装置
本发明涉及高旋飞行体制导控制,具体而言,涉及一种高旋飞行体尾部变外形制导控制装置。
背景技术:
1、随着战争模式的转变和精确打击作战思想的普及,常规飞行体已经难以满足现代战争的要求,制导飞行体较常规飞行体展现出智能化程度高与打击精度高的优势,因此制导飞行体在现代化战争中应用比例越来越高。对制导飞行体进行有效地制导控制是实现其精确打击的关键,而对其进行制导控制的设计却面临着诸多困难。
2、高旋飞行体由于其高旋特性(滚转角速率可达上百转每秒),为导航姿态测量、执行机构工作以及制导控制方法设计等带来了极大的挑战。传统制导飞行体的制导精度较差,由于其制导控制组件功能有限,难以在高动态环境下获取飞行体精确的导航信息,进而有效操纵执行机构实现制导控制。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、有鉴于此,本发明的目的是提供一种高旋飞行体尾部变外形制导控制装置,解决现有技术中由于制导控制组件功能有限,难以在高动态环境下有效实现飞行体制导控制的技术问题。
2、一种高旋飞行体尾部变外形制导控制装置,包括尾部壳体(70)、隔离滚转机构(10)、底座(20)、安装座(21)、变外形减旋片(30)、导航机构(40)、执行机构(50)和电子舱模块(60);
3、隔离滚转机构(10),设置于飞行体尾部壳体(70)中,连接飞行体尾部壳体(70)与飞行体前体80;
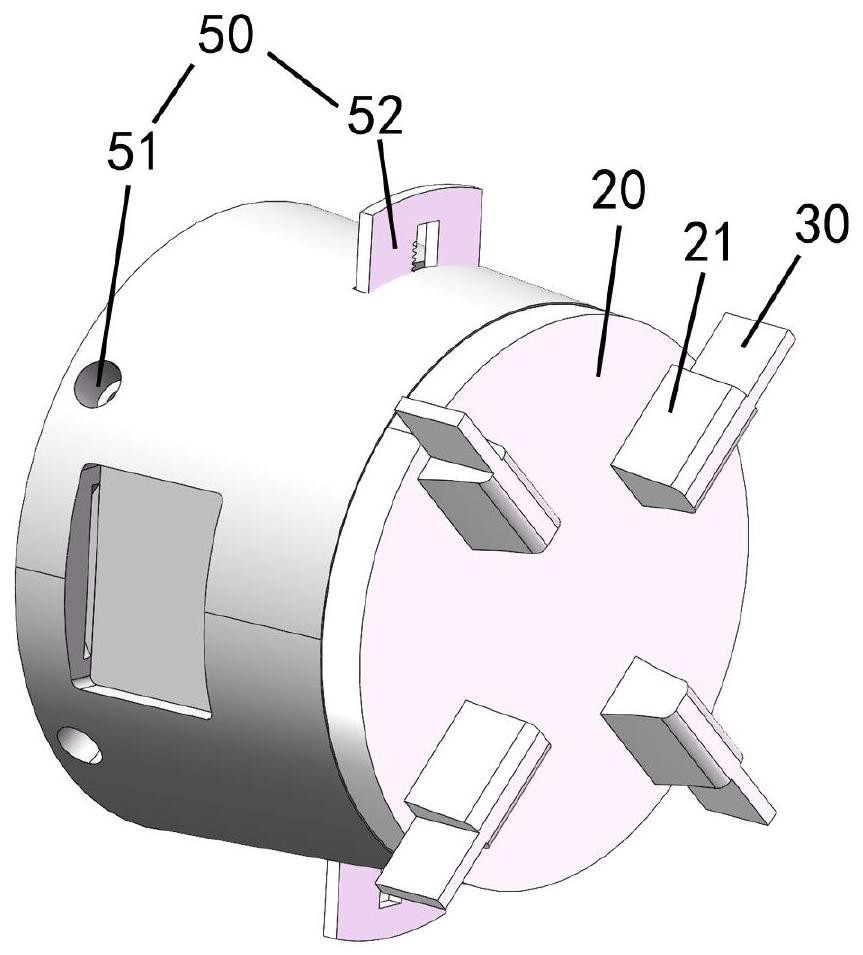
4、底座(20),固定在飞行体尾部壳体(70)尾部的端部,底座(20)表面固定设置有多个安装座(21),安装座(21)绕底座(20)的轴线均匀间隔设置;
5、每个安装座(21)内设置一个变外形减旋片(30);变外形减旋片(30)的近端设置在安装座(21)内,并可在安装座(21)内摆动,初始时,变外形减旋片(30)的长度方向垂直于底座(20),在飞行体发射后出炮口的瞬间,高速旋转产生的离心力会使减旋片(30)的远端向外摆动,则其远端伸出底座(20)的轮廓之外;
6、导航机构(40),用于获取高旋飞行体的导航数据,并将导航数据发送给电子舱模块进行处理;
7、执行机构(50),包括脉冲发动机(51)和变外形扰流机构,多个脉冲发动机(51)绕尾部壳体(70)的轴线均匀间隔设置在尾部壳体(70)的外侧,通过电子舱模块(60)发送的控制指令进行点火,通过脉冲形式的直接力作用改变飞行体的运动;
8、变外形扰流机构有多个,在尾部壳体(70)上沿轴线对称设置在尾部壳体(70)的外侧,具有位于尾部壳体(70)内的第一位置和位于尾部壳体(70)外的第二位置,在飞行体的飞行过程中由电子舱模块70发送的控制指令控制其从尾部壳体(70)内弹出或收回,在第一位置和第二位置之间切换,从而改变飞行体运动过程中所受气动力的变化;
9、电子舱模块(60),设置于飞行体尾部壳体(70)内的电子舱体内,与导航机构(40)和执行机构(50)相连接。
10、较佳的,所述变外形扰流机构包括变外形扰流片(52)、齿轮(53)以及驱动电机(54);变外形扰流片(52)设置在尾部壳体(70)设置的缺口内,其可在缺口内伸缩;变外形扰流片(52)具有一个滑槽(520),滑槽(520)内侧加工有齿,与齿轮(53)啮合,齿轮(53)由驱动电机带动下转动,由此可带动变外形扰流片(52)从第一位置移动到第二位置。
11、较佳的,所述隔离滚转机构(10)采用轴承实现。
12、本发明具有如下有益效果:
13、本发明公开了一种高旋飞行体尾部变外形制导控制装置,滚转隔离机构连接飞行体尾部壳体与飞行体前体的同时隔离前体的旋转;变外形减旋片设置于底座背离尾部壳体的一侧,用于降低飞行体尾部壳体的转速,为变外形制导控制组件中导航机构的测量和执行机构的作用提供稳定平台;导航机构用于获取导航信息;执行机构包括脉冲发动机和变外形扰流片,为高旋飞行体提供直接力气动力复合控制;电子舱模块设置于飞行体尾部壳体内的电子舱体内,与导航机构和执行机构相连接;本发明的技术方案的高旋飞行体尾部变外形制导控制组件及装置能够有效地提升高动态环境下运动的飞行体的制导控制精度。
技术特征:
1.一种高旋飞行体尾部变外形制导控制装置,其特征在于,包括尾部壳体(70)、隔离滚转机构(10)、底座(20)、安装座(21)、变外形减旋片(30)、导航机构(40)、执行机构(50)和电子舱模块(60);
2.如权利要求1所述的一种高旋飞行体尾部变外形制导控制装置,其特征在于,所述变外形扰流机构包括变外形扰流片(52)、齿轮(53)以及驱动电机(54);变外形扰流片(52)设置在尾部壳体(70)设置的缺口内,其可在缺口内伸缩;变外形扰流片(52)具有一个滑槽(520),滑槽(520)内侧加工有齿,与齿轮(53)啮合,齿轮(53)由驱动电机带动下转动,由此可带动变外形扰流片(52)从第一位置移动到第二位置。
3.如权利要求1所述的一种高旋飞行体尾部变外形制导控制装置,其特征在于,所述隔离滚转机构(10)采用轴承实现。
技术总结
本发明公开了一种高旋飞行体尾部变外形制导控制装置,滚转隔离机构连接飞行体尾部壳体与飞行体前体的同时隔离前体的旋转;变外形减旋片设置于底座背离尾部壳体的一侧,用于降低飞行体尾部壳体的转速,为变外形制导控制组件中导航机构的测量和执行机构的作用提供稳定平台;导航机构用于获取导航信息;执行机构包括脉冲发动机和变外形扰流片,为高旋飞行体提供直接力气动力复合控制;电子舱模块设置于飞行体尾部壳体内的电子舱体内,与导航机构和执行机构相连接;本发明的技术方案的高旋飞行体尾部变外形制导控制组件及装置能够有效地提升高动态环境下运动的飞行体的制导控制精度。
技术研发人员:沈凯,仇嘉泰,邓志红,付梦印,余浩
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!