一种高空艇载反无人机防御装置和防御方法
本申请涉及反无人机,特别是涉及一种高空艇载反无人机防御装置和防御方法。
背景技术:
1、无人机作为新质作战力量,在局部冲突中发挥了重要作用,反无人机防御系统也在不断发展。小型无人机是典型的低空慢速小目标,传统地面反无人机技术如雷达探测、电磁干扰、激光摧毁等均面临不同问题,雷达探测无法探测到处于悬停或低速状态时的无人机,受地杂波影响大,无法区分空中异物;电磁干扰无法干扰依靠编程进行飞行的无人机,且对周围电磁环境有附带影响;激光摧毁等反制技术所需成本高;且传统地面反无人机技术难以形成对低空慢速小目标有效防御,同时地面反无人机系统很容易成为对方打击目标。在上述背景下,为解决现有反无人机防御系统探测距离短以及本身易被打击摧毁等问题,需要采用一种新的反无人机手段,以实现探测距离远,反制手段更全面,成本更低廉,系统更安全的反无人机装置。
技术实现思路
1、本申请的目的是提供一种高空艇载反无人机防御装置和防御方法,探测距离远,反制手段更全面,成本更低廉,系统更安全。
2、为实现上述目的,本申请提供了如下方案:
3、第一方面,本申请提供了一种高空艇载反无人机防御装置,包括:飞艇平台、反无人机装置和控制系统;所述反无人机装置与所述控制系统连接;所述反无人机装置包括:探测系统、干扰系统和防御系统;所述防御系统包括至少一个防御无人机;
4、所述飞艇平台搭载所述反无人机装置;所述飞艇平台用于在空中定点驻留;
5、所述探测系统用于对入侵无人机进行探测、识别和跟踪,得到探测信息,并将所述探测信息发送给所述控制系统;
6、所述控制系统用于根据所述探测信息向所述干扰系统和所述防御系统下发控制系统指令;
7、所述干扰系统用于根据所述控制系统指令对所述入侵无人机进行电磁干扰和导航信号干扰;
8、所述防御系统用于根据所述控制系统指令对所述入侵无人机进行防御。
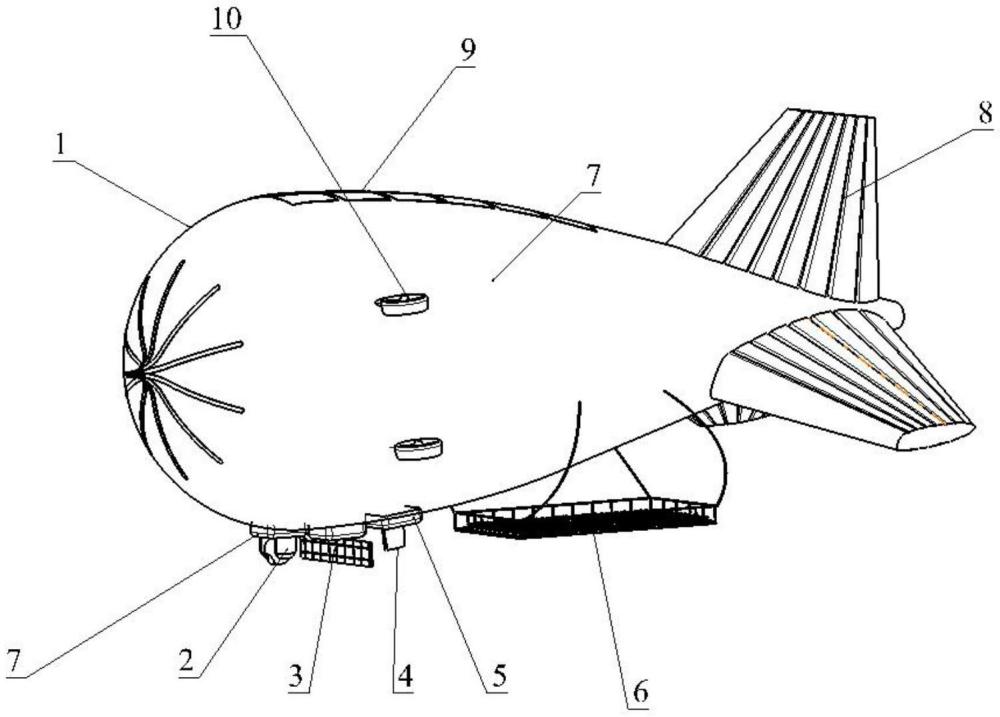
9、可选地,所述高空艇载反无人机防御装置还包括设置在所述飞艇平台上的囊体、尾翼、能源装置和推进装置;
10、所述囊体用于为所述飞艇平台提供升力;
11、所述尾翼用于为所述飞艇平台提供力矩;
12、所述能源装置用于为所述推进装置供能;
13、所述推进装置用于调整所述飞艇平台的俯仰角、偏航角和滚转角,并产生使所述飞艇平台前进的推力。
14、可选地,所述探测系统包括光电侦察模块、雷达侦察模块和电子侦察模块;
15、所述光电侦察模块用于获取所述入侵无人机的红外图像和可见光图像;
16、所述雷达侦察模块用于获取所述入侵无人机的合成孔径雷达图像;
17、所述电子侦察模块用于对辐射源目标进行侦收、分选和识别,得到辐射源目标信息,并对入侵无人机操作者进行侦测定位,得到入侵无人机操作者信息;
18、所述探测信息包括:所述红外图像、所述可见光图像、所述合成孔径雷达图像、所述辐射源目标信息和所述入侵无人机操作者信息。
19、可选地,所述干扰系统包括:电磁干扰模块和导航信号干扰模块;
20、所述电磁干扰模块用于实现对入侵无人机的通信链路的主动干扰;
21、所述导航信号干扰模块用于对使用卫星导航的入侵无人机进行干扰。
22、可选地,所述防御系统还包括:空中无人机停机平台;所述防御无人机包括格斗无人机;
23、所述空中无人机停机平台用于停放所述格斗无人机。
24、可选地,所述控制系统包括:依次连接的飞艇参数记录系统、无线电传输系统和反无人机系统;所述无线电传输系统还与所述探测系统连接;
25、所述飞艇参数记录系统用于记录所述飞艇平台的飞艇参数;所述飞艇参数包括:飞行高度、位置、速度、航向、加速度和姿态角;
26、所述无线电传输系统用于向地面站及卫星发送所述飞艇参数,并将接收的第一指令、第二指令和所述探测信息传输至所述反无人机系统;所述第一指令由所述地面站生成,所述第二指令由所述卫星生成;
27、所述反无人机系统用于根据所述第一指令、所述第二指令和所述探测信息下发所述控制系统指令;所述控制系统指令包括选择干扰模式和遥控所述防御无人机。
28、可选地,所述推进装置包括姿态浆;所述姿态桨为4个,分别分布在所述囊体的左上部、右上部、左下部和右下部。
29、可选地,所述能源装置包括太阳能电池板和储能电池。
30、可选地,所述防御系统还包括设置在空中无人机停机平台上的无人机充电装置和无人机着陆引导装置;
31、所述无人机充电装置用于对所述防御无人机充电;
32、所述无人机着陆引导装置用于指引所述防御无人机停在充电桩上充电。
33、第二方面,本申请提供了一种高空艇载反无人机防御方法,所述高空艇载反无人机防御方法基于上述提供的高空艇载反无人机防御装置实现;所述高空艇载反无人机防御方法包括:
34、获取探测信息;所述探测信息是探测系统对入侵无人机进行探测、识别和跟踪得到的;
35、根据所述探测信息下发控制系统指令;所述控制系统指令用于干扰系统对入侵无人机进行电磁干扰和导航信号干扰,以及防御系统对入侵无人机进行防御。
36、根据本申请提供的具体实施例,本申请具有了以下技术效果:
37、本申请提供了一种高空艇载反无人机防御装置和防御方法,采用飞艇平台搭载反无人机装置,飞艇平台部署高度高,其探测距离远,一般采用空空导弹才能击落,难以被摧毁,解决了地面无人机系统容易被普通弹药击毁的问题;该装置价值廉价,远低于空空导弹价值,解决了激光摧毁、导弹等反制技术成本高的问题;飞艇平台与探测、干扰和防御系统相结合,可以机动分布式部署,打击精度高,快速识别、拦截和防御来袭的无人机;并且采用无人机对抗无人机的方式比激光武器、捕捉网等方式都廉价且便宜。本申请的高空艇载反无人机防御装置,探测距离远,反制手段更全面,成本更低廉,系统更安全,不易被打击摧毁。
技术特征:
1.一种高空艇载反无人机防御装置,其特征在于,所述高空艇载反无人机防御装置包括:飞艇平台、反无人机装置和控制系统;所述反无人机装置与所述控制系统连接;所述反无人机装置包括:探测系统、干扰系统和防御系统;所述防御系统包括至少一个防御无人机;
2.根据权利要求1所述的高空艇载反无人机防御装置,其特征在于,所述高空艇载反无人机防御装置还包括设置在所述飞艇平台上的囊体、尾翼、能源装置和推进装置;
3.根据权利要求1所述的高空艇载反无人机防御装置,其特征在于,所述探测系统包括光电侦察模块、雷达侦察模块和电子侦察模块;
4.根据权利要求1所述的高空艇载反无人机防御装置,其特征在于,所述干扰系统包括:电磁干扰模块和导航信号干扰模块;
5.根据权利要求1所述的高空艇载反无人机防御装置,其特征在于,所述防御系统还包括:空中无人机停机平台;所述防御无人机包括格斗无人机;
6.根据权利要求1所述的高空艇载反无人机防御装置,其特征在于,所述控制系统包括:依次连接的飞艇参数记录系统、无线电传输系统和反无人机系统;所述无线电传输系统还与所述探测系统连接;
7.根据权利要求2所述的高空艇载反无人机防御装置,其特征在于,所述推进装置包括姿态浆;所述姿态桨为4个,分别分布在所述囊体的左上部、右上部、左下部和右下部。
8.根据权利要求2所述的高空艇载反无人机防御装置,其特征在于,所述能源装置包括太阳能电池板和储能电池。
9.根据权利要求5所述的高空艇载反无人机防御装置,其特征在于,所述防御系统还包括设置在空中无人机停机平台上的无人机充电装置和无人机着陆引导装置;
10.一种高空艇载反无人机防御方法,其特征在于,所述高空艇载反无人机防御方法采用权利要求1-9中任一项所述的高空艇载反无人机防御装置实现;所述高空艇载反无人机防御方法包括:
技术总结
本申请公开了一种高空艇载反无人机防御装置和防御方法,涉及反无人机技术领域,该装置包括飞艇平台、反无人机装置和控制系统;反无人机装置与控制系统连接;反无人机装置包括探测系统、干扰系统和防御系统;飞艇平台搭载反无人机装置;飞艇平台用于在高空定点驻留;探测系统用于对入侵无人机进行探测、识别和跟踪,得到探测信息,并将探测信息发送给控制系统;控制系统用于根据探测信息向干扰系统和防御系统下发控制系统指令;干扰系统用于根据控制系统指令对入侵无人机进行电磁干扰和导航信号干扰;防御系统用于根据控制系统指令采用防御无人机,对入侵无人机进行防御。本申请的装置,探测距离远,反制手段更全面,成本更低廉,系统更安全。
技术研发人员:付宸锐,刘东旭,吕金虎,赵达
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!