无人机的智能化更换组件的制作方法
1.本发明涉及无人机农业农药喷洒领域,具体的来说,本发明涉及无人机的智能化更换组件。
背景技术:
2.国内外无人机相关技术飞速发展,无人机系统种类繁多、用途广特点鲜明,致使其在尺寸、质量、航程、航时、飞行高度、飞行速度,任务等多方面都有较大差异。由于无人机的多样性,出于不同的考量会有不同的分类方法:按飞行平台构型分类,无人机可分为固定翼无人机、旋翼无人机、无人飞艇、伞翼无人机、扑翼无人机等。按用途分类,无人机可分为军用无人机和民用无人机。军用无人机可分为侦察无人机、诱饵无人机、电子对抗无人机、通信中继无人机、无人战斗机以及靶机等;民用无人机可分为巡查/监视无人机、农用无人机、气象无人机、勘探无人机以及测绘无人机等。按尺度分类(民航法规),无人机可分为微型无人机、轻型无人机、小型无人机以及大型无人机。微型无人机是指空机质量小于等于7kg,轻型无人机质量大于7kg,但小于等于116kg的无人机,且全马力平飞中,校正空速小于100km/h(55nmile/h),升限小于3000m。小型无人机,是指空机质量小于等于5700kg的无人机,微型和轻型无人机除外。大型无人机,是指空机质量大于5700kg的无人机。按活动半径分类,无人机可分为超近程无人机、近程无人机、短程无人机、中程无人机和远程无人机。超近程无人机活动半径在15km以内,近程无人机活动半径在15~50km之间,短程无人机活动半径在50~200km之间,中程无人机活动半径在200~800km之间,远程无人机活动半径大于800km。按任务高度分类,无人机可以分为超低空无人机、低空无人机、中空无人机、高空无人机和超高空无人机。超低空无人机任务高度一般在0~loom之间,低空无人机任务高度一般在100~1000m之间,中空无人机任务高度一般在1000~7000m之间,高空无人机任务高度一般在7000~18000m之间,超高空无人机任务高度般大于18000m。
3.现有农用无人机在进行农药喷洒时,由于单次喷洒农药储存量较小,在农药喷洒完后需要多次降落手动更换药筒,这样不仅降低了农药喷洒效率,而且由于喷洒完的地点不确定性,需要人工行走至降落的地点,从而增加了人工劳动强度,因此为了解决这类问题,本发明对现有人工更换药筒方式进行改进,通过设置多个站点,使用间歇周期性的方式进行供药并采用自动升降方式对无人机中的药筒进行自动更换,不仅增加了农药喷洒的工作效率,而且也大大节省了工人的劳动强度以及时间。
技术实现要素:
4.鉴于上述问题作出本发明,且本发明的目的是提供一种通过设置多个站点,使用间歇周期性的方式进行供药并采用自动升降方式对无人机中的药筒进行自动更换,不仅增加了农药喷洒的工作效率,而且也大大节省了工人的劳动强度以及时间。
5.为实现该目的,本发明提出的技术方案如下:无人机的智能化更换组件,其包括设置有内腔的壳体(100),壳体(100)内安装有
送药装置(400)、换药装置(500),所述的送药装置(400)用于向换药装置(500)输送装满农药的药筒,换药装置(500)用于向无人机更换药筒;所述的壳体(100)上开设有用于向送药装置(400)投放装满农药药筒的安装缺口,壳体(100)的顶端开设有投放口、底端开设有弃药口且所述的投放口与弃药口同轴布置。
6.进一步的,送药装置(400)包括传药机构(410)、间歇供药机构(420),所述的传药机构(410)用于向间歇供药机构(420)输送装满农药的药筒,间歇供药机构(410)用于向换药装置(500)间歇周期性输送装满农药的药筒;所述的传药机构(410)包括传药架(411)、传药轴(414)、传动架(418),所述的传药架(411)固定安装在壳体(100)内且传药架(411)上活动安装有传动辊轴(412)并绕自身轴线转动;所述的传动辊轴(412)的轴线与壳体(100)的宽度方向平行,传动辊轴(412)设置有两个并沿壳体(100)的长度方向间隔布置,两个传动辊轴(412)之间设置有传药带(413);所述的传药带(413)的进料端位于安装缺口的正下方且传动带(413)的水平运动方向与壳体(100)的长度方向平行;所述的传药轴(414)呈竖直布置且传药轴(414)的下端活动安装在壳体(100)内并绕自身轴线转动;所述的传动架(418)固定安装在壳体(100)内且传动架(418)上活动安装有传动轴(416)并绕自身轴线转动;所述的传动轴(416)的轴线与传动辊轴(412)轴线平行且传动轴(416)与传药轴(414)之间设置有第一传动件(415)且两者通过第一传动件(415)进行动力传递,所述的第一传动件(415)为传动比等于一的锥齿轮组结构;所述的传动轴(416)与任一传动辊轴(412)之间设置有第二传动件(417)且两者通过第二传动件(417)进行动力传递,所述的第二传动件(415)为传动比大于一的直齿轮组结构。
7.进一步的,所述的间歇供药机构(420)设置于传药带(413)的出料端,间歇供药机构(420)包括环型供药板(421)、传动电机(424)、间歇组件,所述的间歇组件用于接收传动电机(424)的动力并驱动药筒在供药板(421)上进行移动;所述的环形供药板(421)为轴向竖直的圆环形板体结构,环形供药板(421)与壳体(100)之间设置有支撑杆(422),所述的支撑杆(422)呈竖直布置且支撑杆(422)的上端与环型供药板(421)固定、下端与壳体(100)底端固定,所述的支撑杆(422)设置有两个并沿环型供药板(421)的径向布置;所述的环形供药板(421)的最大水平高度与传药带(413)的最大水平高度相等,环型供药板(421)上开设有供药口且传药带(413)的出料端位于供药口内,环形供药板(421)的外圆面水平向外延伸有出药板且出药板与供药口位于环形供药板(421)的同一直径上;所述的传动电机(424)与壳体(100)之间设置有传动电机架(423),所述的传动电机架(423)固定安装在壳体(100)的底部,传动电机(424)固定安装在传动电机架(423)上且传动电机(424)的输出轴竖直朝上。
8.进一步的,所述的间歇组件包括供药轴(425)、供药转盘(427)、驱动件(429),所述的供药转盘(427)同轴设置于环型供药板(421)内,供药转盘(427)的底端同轴开设有避让
槽,所述的避让槽的槽壁径向向外开设有驱动槽,所述的驱动槽设置有若干个并沿供药转盘(427)的圆周方向均匀间隔布置且相邻的两个驱动槽之间设置有驱动架(428);所述的驱动架(428)固定安装在供药转盘(427)的底端且驱动架(428)上开设有弧形槽;所述的供药轴(425)呈竖直布置且供药轴(425)的下端活动安装在壳体(100)的底部并绕自身轴线转动,供药轴(425)的上端穿过设置于供药转盘(427)上的安装孔一且供药轴(425)与供药转盘(427)同轴固定连接,供药轴(425)的上端设置有供药杆(426);所述的供药杆(426)长度方向与供药轴(425)的轴向垂直且供药杆(426)的一端与供药轴(425)的上端固定连接,供药杆(426)的另一端固定安装有用于拨动药筒的弧形拨块,所述的弧形拨块位于环型供药板(421)的上方。
9.进一步的,所述的驱动件(429)包括连动杆(4291)、引导块(4292)、拨动块(4293),所述的连动杆(4291)长度方向与供药轴(426)轴线垂直,连动杆(4291)上设置有安装孔二且传动电机(424)的输出轴通过安装孔二与连动杆(4291)固定连接;所述的引导块(4292)固定安装在连动杆(4291)的一端且引导块(4292)背离连动杆(4291)的一侧设置有引导弧面,所述的引导弧面与设置于驱动架(428)上的弧形槽相匹配;所述的拨动块(4293)竖直设置于连动杆(4291)的另一端的杆壁上且拨动块(4293)与设置于供药转盘(427)上的驱动槽构成沿供药转盘(427)径向的滑动导向配合;上述的供药轴(425)与传药轴(414)之间设置有第一传动机构(430)且两者通过第一传动机构(430)进行动力传递,所述的第一传动机构(430)为带传动机构。
10.进一步的,所述的换药装置(500)包括驱动机构(510)、换药机构(520)、推药机构,所述的推药机构用于将装满农药的药筒推动至换药机构(520)内,所述的驱动机构(510)用于接收传动电机(424)的动力并将动力传递至换药机构(520),所述的换药机构(520)用于为无人机喷洒装置(200)更换装满农药的药筒;所述的驱动机构(510)包括支撑盘(511)、齿圈(513)、驱动组件,所述的支撑盘(511)为圆形盘体结构并与设置于壳体(100)上的弃药口同轴线布置,支撑盘(511)顶部端面开设有贯穿其厚度的方形安装槽,支撑盘(511)与壳体(100)的底部之间设置有承托杆(512),所述的方形安装槽与支撑盘(511)同轴线布置;所述的承托杆(512)呈竖直布置且承托杆(512)的上端与支撑盘(511)顶端固定、下端与壳体(100)内的底部固定,所述的承托杆(512)设置有若干个并沿支撑盘(511)的圆周方向均匀间隔布置;所述的支撑板(511)的顶部端面同轴开设有环形槽,所述的齿圈(513)同轴活动安装在环形槽内并可绕自身轴线转动;所述的驱动组件用于向换药机构(520)传递动力,驱动组件包括驱动轴(514)、安装块(515)、驱动齿轮(516),所述的驱动轴(514)轴线与传动电机(424)的输出轴线垂直;所述的安装块(515)固定安装在支撑盘(511)的顶部端面且安装块(515)位于环形槽与方形安装槽之间,所述的驱动轴(514)活动安装在安装块(515)上并绕自身轴线转动;所述的驱动齿轮(516)同轴固定套设在驱动轴(514)的外部,所述的驱动齿轮(516)为直齿轮结构并与齿圈(513)啮合连接;
所述的驱动组件设置有四组并沿支撑盘(511)的圆周方向均匀间隔布置,且任意一组驱动组件中的驱动轴(514)与传动电机(424)的输出轴之间设置有第三传动件(517)且两者通过第三传动件(517)进行动力传递,所述的第三传动件(517)为传动比小于一的锥齿轮组结构。
11.进一步的,所述的换药机构(520)包括换药架(521)、换药板(524)、第一传动组件,所述的换药架(521)设置有三种位置状态分别为接药位置、换药位置、弃药位置且接药位置为初始位置;所述的换药架(521)为正方板体结构并位于方形安装槽内且换药架(521)与方形安装槽同轴线布置,换药架(521)的顶部端面开设有贯穿其厚度的换药槽;所述的换药架(521)处于接药位置时,换药架(521)的最大水平高度与支撑盘(511)的最大水平高度相等;换药架(521)处于换药位置时,换药架(521)位于设置于壳体(100)上的投放口处;换药架(521)处于弃药位置时,换药架(521)位于设置于壳体(100)上的弃药口处。
12.进一步的,所述的换药架(521)与驱动轴(514)之间设置有曲杆组件,所述的曲杆组件用于接收驱动轴(514)的动力并驱使换药架(521)做位置状态变换,曲杆组件包括曲杆一(522)、曲杆二(523),所述的曲杆一(522)的一端与驱动轴(514)的一端活动连接并绕驱动轴(514)的轴线方向转动,曲杆一(552)的另一端与曲杆二(523)的一端铰接且曲杆一(522)与曲杆二(523)之间构成的铰接轴与驱动轴(514)的轴线平行,曲杆二(523)的另一端与换药架(521)铰接且曲杆二(523)与换药架(521)之间构成的铰接轴与驱动轴(514)的轴线平行;所述的换药板(524)设置成相互切换的打开状态与关闭状态且关闭状态为初始状态,所述的换药板(524)由两块呈矩形板体的封堵板构成,所述的封堵板位于换药槽的上开口处且封堵板的底端固定安装有固定块,所述的固定块设置有两个并沿封堵板的长度方向间隔布置且两个固定块之间设置有换药轴(527),所述的换药轴(527)的轴线与封堵板的长度方向平行且固定块固定套设在换药轴(527)的外部,换药轴(527)活动安装在换药槽的槽壁上并绕自身轴线转动;所述的第一传动组件用于驱使封堵板绕换药轴(527)的轴线方向转动且第一传动组件对应设置有两组,第一传动组件包括换药齿轮(528)、换药杆(525)、换药齿条(526),所述的换药齿轮(528)同轴固定套设在换药轴(527)的外部;所述的换药杆(525)呈竖直布置且换药杆(525)的下端固定安装在壳体(100)底端,换药杆(525)上开设有固定槽,所述的换药齿条(526)固定安装在固定槽内且换药齿条(526)的长度方向与换药杆(525)的长度方向平行并位于换药齿轮(528)的正下方;所述的换药板(524)处于关闭状态时,两个封堵板对换药槽上开口端进行封堵;换药板(524)处于打开状态时,两个封堵板解除对换药槽上开口端的封堵。
13.进一步的,所述的推药机构包括推药电机(530)、第二传动组件(550)、推药组件(540),所述的第二传动组件用于接收推药电机(530)的动力并将动力传递至推药组件(540),推药组件(540)用于将装满农药的药筒推至换药板(524)上;所述的推药电机(530)固定安装在壳体(100)内且推药电机(530)的输出轴竖直朝下;
所述的推药组件(540)包括推药轴(543)、传动构件、推药爪(548),所述的推药轴(543)用于接收第二传动组件(550)的动力并将动力传递至传动构件,传动构件用于驱动推药爪(548)沿壳体(100)的长度方向做往复运动;所述的推药爪(548)为半环形块状结构,推药爪(548)的初始位置位于环形供药板(421)的正上方且推药爪(548)、设置于环形供药板(421)外圆面的出药板、设置于环形供药板(421)上的供药口位于同一竖直平面内。
14.综上所述,本发明提出的一种无人机农药筒自动更换机,其有益效果为:1、本发明对现有人工更换药筒方式进行改进,通过设置多个站点,使用间歇周期性的方式进行供药并采用自动升降方式对无人机中的药筒进行自动更换,不仅增加了农药喷洒的工作效率,而且也大大节省了工人的劳动强度以及时间。
15.2、为了能使无人机210降落至设置于壳体100上的投放口的正上方,壳体100竖直上安装有用于对支撑腿220进行引导的定位斗240。
16.3、为了使推药爪能精准把药筒推入换药板上,推药爪548、设置于环形供药板421外圆面的出药板、设置于环形供药板421上的供药口位于同一竖直平面内。
附图说明
17.为了更清楚地说明本发明实施例的技术方案,下文中将对本发明实施例的附图进行简单介绍。其中,附图仅仅用于展示本发明的一些实施例,而非将本发明的全部实施例限制于此。
18.图1为本发明的结构示意图;图2为本发明的壳体与定位斗配合图;图3为本发明的结构示意图;图4为本发明的结构示意图;图5为本发明的药筒结构示意图;图6为本发明的送药装置机构示意图;图7为本发明的传药机构结构示意图;图8为本发明的间歇供药机构机构示意图;图9为本发明的驱动件与传药转盘配合图;图10为本发明的驱动件结构示意图;图11为本发明的换药装置结构示意图;图12为本发明的驱动机构结构示意图;图13为本发明的换药机构结构示意图;图14为本发明的换药架与换药轴配合图;图15为本发明的换药杆与换药齿条配合图;图16为本发明的推药机构结构示意图;图17为本发明的推药组件结构示意图;图18为本发明的无人机喷药装置结构示意图;图19为本发明的喷药机构结构示意图;图20为本发明的安装壳剖视图;
图21为本发明的夹持组件与控制组件配合图;图22为本发明的固定杆剖视图;图23为本发明的控制组件爆炸图;图24为本发明的控制组件爆炸图;图中标示为:100、壳体;200、无人机喷洒装置;210、无人机;220、支撑腿;230、夹持机构;231、安装壳;232、农药喷头;233、夹持组件;2331、夹持架;2332、夹持杆;2333、夹持弹簧;2334、引导块;2335、连接杆;2336、压持杆;2337、导向杆;2338、固定杆;2339、压持弹簧;234、控制组件;2341、安装套筒;2342、控制杆;2343、控制转筒;2344、契合块;2345、约束块;2346、导向块;2347、支撑轴;240、定位斗;300、药筒;400、送药装置;410、传药机构;411、传药架;412、传药辊轴;413、传药带;414、传药轴;415、第一传动件;416、传动轴;417、第二传动件;418、传动架;420、间歇供药机构;421、环型供药板;422、支撑杆;423、传动电机架;424、传动电机;425、供药轴;426、供药杆;427、供药转盘;428、驱动架;429、驱动件;4291、连动杆;4292、引导块;4293、拨动块;430、第一传动机构;500、换药装置;510、驱动机构;511、支撑盘;512、承托杆;513、齿圈;514、驱动轴;515、安装块;516、驱动齿轮;517、第三传动件;520、换药机构;521、换药架;522、曲杆一;523、曲杆二;524、换药板;525、换药杆;526、换药齿条;527、换药轴;528、换药齿轮;530、推药电机;540、推药机构;541、承托架;542、安装杆;543、推药轴;544、内齿轮;545、固定架;546、滑动块;547、推药杆;548、推药爪;549、推药齿轮;550、第二传动组件。
具体实施方式
19.为了使得本公开的技术方案的目的、技术方案和优点更加清楚,下文中将结合本公开具体实施例的附图,对本公开实施例的技术方案进行清楚、完整地描述。附图中相同的附图标记代表相同的部件。需要说明的是,所描述的实施例是本公开的一部分实施例,而不是全部的实施例。基于所描述的本公开的实施例,本领域普通技术人员在无需创造性劳动
的前提下所获得的所有其他实施例,都属于本公开保护的范围。
20.一种无人机农药筒自动更换机,其包括药筒更换平台、无人机喷洒装置200、药筒300,药筒300用于存放喷洒的农药,药筒更换平台用于对无人机喷洒装置200更换药筒300,无人机喷洒装置200用于喷洒药筒300内的农药。
21.所述的药筒更换平台包括设置有内腔的壳体100,壳体100内安装有送药装置400、换药装置500,所述的送药装置400用于向换药装置500输送装满农药的药筒300,换药装置500用于向无人机喷洒装置200更换装满农药的药筒300。
22.所述的壳体100上开设有用于向送药装置400投放装满农药药筒300的安装缺口,壳体100的顶端开设有投放口、底端开设有弃药口且所述的投放口与弃药口同轴布置。
23.所述的药筒300包括筒身、筒盖,所述的筒身与筒盖均为为圆柱形壳体结构,筒盖同轴固定安装在筒身的顶端且筒盖上开设有扣紧槽,所述的扣紧槽设置有两个并沿筒盖的轴线方向对称分布于筒盖的两侧;具体的,所述的筒盖的顶端同轴设置有倒角。
24.所述的送药装置400包括传药机构410、间歇供药机构420,所述的传药机构410用于向间歇供药机构420输送装满农药的药筒300,间歇供药机构410用于向换药装置500间歇周期性输送装满农药的药筒300。
25.所述的传药机构410包括传药架411、传药轴414、传动架418,所述的传药架411固定安装在壳体100内且传药架411上活动安装有传动辊轴412并绕自身轴线转动。
26.所述的传动辊轴412的轴线与壳体100的宽度方向平行,传动辊轴412设置有两个并沿壳体100的长度方向间隔布置,两个传动辊轴412之间设置有传药带413。
27.所述的传药带413的进料端位于安装缺口的正下方且传动带413的水平运动方向与壳体100的长度方向平行。
28.所述的传药轴414呈竖直布置且传药轴414的下端活动安装在壳体100内并绕自身轴线转动。
29.所述的传动架418固定安装在壳体100内且传动架418上活动安装有传动轴416并绕自身轴线转动。
30.所述的传动轴416的轴线与传动辊轴412轴线平行且传动轴416与传药轴414之间设置有第一传动件415且两者通过第一传动件415进行动力传递;具体的,所述的第一传动件415为传动比等于一的锥齿轮组结构。
31.所述的传动轴416与任一传动辊轴412之间设置有第二传动件417且两者通过第二传动件417进行动力传递;具体的,所述的第二传动件415为传动比大于一的直齿轮组结构。
32.所述的间歇供药机构420设置于传药带413的出料端,间歇供药机构420包括环型供药板421、传动电机424、间歇组件,所述的间歇组件用于接收传动电机424的动力并驱动药筒300在供药板421上进行移动。
33.所述的环形供药板421为轴向竖直的圆环形板体结构,环形供药板421与壳体100之间设置有支撑杆422,所述的支撑杆422呈竖直布置且支撑杆422的上端与环型供药板421固定、下端与壳体100底端固定;具体的,所述的支撑杆422设置有两个并沿环型供药板421的径向布置。
34.所述的环形供药板421的最大水平高度与传药带413的最大水平高度相等,环型供药板421上开设有供药口且传药带413的出料端位于供药口内,环形供药板421的外圆面水
平向外延伸有出药板且出药板与供药口位于环形供药板421的同一直径上。
35.所述的传动电机424与壳体100之间设置有传动电机架423,所述的传动电机架423固定安装在壳体100的底部,传动电机424固定安装在传动电机架423上且传动电机424的输出轴竖直朝上。
36.所述的间歇组件包括供药轴425、供药转盘427、驱动件429,所述的供药转盘427同轴设置于环型供药板421内,供药转盘427的底端同轴开设有避让槽,所述的避让槽的槽壁径向向外开设有驱动槽,所述的驱动槽设置有若干个并沿供药转盘427的圆周方向均匀间隔布置且相邻的两个驱动槽之间设置有驱动架428。
37.所述的驱动架428固定安装在供药转盘427的底端且驱动架428上开设有弧形槽。
38.所述的供药轴425呈竖直布置且供药轴425的下端活动安装在壳体100的底部并绕自身轴线转动,供药轴425的上端穿过设置于供药转盘427上的安装孔一且供药轴425与供药转盘427同轴固定连接,供药轴425的上端设置有供药杆426。
39.所述的供药杆426长度方向与供药轴425的轴向垂直且供药杆426的一端与供药轴425的上端固定连接,供药杆426的另一端固定安装有用于拨动药筒300的弧形拨块;具体的,所述的弧形拨块位于环型供药板421的上方。
40.所述的驱动件429包括连动杆4291、引导块4292、拨动块4293,所述的连动杆4291长度方向与供药轴426轴线垂直,连动杆4291上设置有安装孔二且传动电机424的输出轴通过安装孔二与连动杆4291固定连接。
41.所述的引导块4292固定安装在连动杆4291的一端且引导块4292背离连动杆4291的一侧设置有引导弧面,所述的引导弧面与设置于驱动架428上的弧形槽相匹配。
42.所述的拨动块4293竖直设置于连动杆4291的另一端的杆壁上且拨动块4293与设置于供药转盘427上的驱动槽构成沿供药转盘427径向的滑动导向配合。
43.更为具体的,上述的供药轴425与传药轴414之间设置有第一传动机构430且两者通过第一传动机构430进行动力传递;更优的,所述的第一传动机构430为带传动机构。
44.供药装置400在实际工作过程中,当需要向无人机喷洒装置200更换装满农药的药筒300时,开启传动电机424,传动电机424输出轴驱动连动杆4291同步转动,连动杆4291转动带动拨动块4293同步转动,当拨动块4293转动至设置于供药转盘427上的驱动槽内时,将会在两者的滑动导向配合下驱使供药转盘427沿自身圆周方向转动,供药转盘427转动驱使供药轴425同步转动,供药轴425转动并通过供药杆426带动设置于供药杆426上的弧形拨块在环型供药板421上同步转动。
45.于此同时,供药轴425转动通过第一传动机构430带动传药轴414绕自身轴线方向转动,传药轴414通过第一传动件415带动传动轴416同步转动,传动轴416通过第二传动件417驱动任一传药辊轴412绕自身轴线转动,并通过两个传药辊轴412的驱使下带动传药带413开始转动。
46.接着,将装满农药的药筒300放在传药带413上并在传药带413的牵引下运动向环形供药板421方向运动,当装满农药的药筒300运动至设置于环型供药板421上的供药口处时,弧形拨块运动至供药口处且装满农药的药筒300在弧形拨块的拨动下在环型供药板421上沿环型供药板421的圆周方向运动,直至将装满农药的药筒300运动到出药板与环型供药板421的连接处。
47.所述的换药装置500包括驱动机构510、换药机构520、推药机构,所述的推药机构用于将装满农药的药筒300推动至换药机构520内,所述的驱动机构510用于接收传动电机424的动力并将动力传递至换药机构520,所述的换药机构520用于为无人机喷洒装置200更换装满农药的药筒300。
48.所述的驱动机构510包括支撑盘511、齿圈513、驱动组件,所述的支撑盘511为圆形盘体结构并与设置于壳体100上的弃药口同轴线布置,支撑盘511顶部端面开设有贯穿其厚度的方形安装槽,支撑盘511与壳体100的底部之间设置有承托杆512;具体的,所述的方形安装槽与支撑盘511同轴线布置。
49.所述的承托杆512呈竖直布置且承托杆512的上端与支撑盘511顶端固定、下端与壳体100内的底部固定;具体的,所述的承托杆512设置有若干个并沿支撑盘511的圆周方向均匀间隔布置。
50.所述的支撑板511的顶部端面同轴开设有环形槽,所述的齿圈513同轴活动安装在环形槽内并可绕自身轴线转动。
51.所述的驱动组件用于向换药机构520传递动力,驱动组件包括驱动轴514、安装块515、驱动齿轮516,所述的驱动轴514轴线与传动电机424的输出轴线垂直。
52.所述的安装块515固定安装在支撑盘511的顶部端面且安装块515位于环形槽与方形安装槽之间,所述的驱动轴514活动安装在安装块515上并绕自身轴线转动。
53.所述的驱动齿轮516同轴固定套设在驱动轴514的外部;具体的,所述的驱动齿轮516为直齿轮结构并与齿圈513啮合连接。
54.更为具体的,所述的驱动组件设置有四组并沿支撑盘511的圆周方向均匀间隔布置,且任意一组驱动组件中的驱动轴514与传动电机424的输出轴之间设置有第三传动件517且两者通过第三传动件517进行动力传递,所述的第三传动件517为传动比小于一的锥齿轮组结构。
55.所述的换药机构520包括换药架521、换药板524、第一传动组件,所述的换药架521设置有三种位置状态分别为接药位置、换药位置、弃药位置且接药位置为初始位置。
56.所述的换药架521为正方板体结构并位于方形安装槽内且换药架521与方形安装槽同轴线布置,换药架521的顶部端面开设有贯穿其厚度的换药槽。
57.更为具体的,所述的换药架521处于接药位置时,换药架521的最大水平高度与支撑盘511的最大水平高度相等;换药架521处于换药位置时,换药架521位于设置于壳体100上的投放口处;换药架521处于弃药位置时,换药架521位于设置于壳体100上的弃药口处。
58.所述的换药架521与驱动轴514之间设置有曲杆组件,所述的曲杆组件用于接收驱动轴514的动力并驱使换药架521做位置状态变换,曲杆组件包括曲杆一522、曲杆二523,所述的曲杆一522的一端与驱动轴514的一端活动连接并绕驱动轴514的轴线方向转动,曲杆一552的另一端与曲杆二523的一端铰接且曲杆一522与曲杆二523之间构成的铰接轴与驱动轴514的轴线平行,曲杆二523的另一端与换药架521铰接且曲杆二523与换药架521之间构成的铰接轴与驱动轴514的轴线平行。
59.所述的换药板524设置成相互切换的打开状态与关闭状态且关闭状态为初始状态,所述的换药板524由两块呈矩形板体的封堵板构成,所述的封堵板位于换药槽的上开口处且封堵板的底端固定安装有固定块,所述的固定块设置有两个并沿封堵板的长度方向间
隔布置且两个固定块之间设置有换药轴527,所述的换药轴527的轴线与封堵板的长度方向平行且固定块固定套设在换药轴527的外部;具体的,换药轴527活动安装在换药槽的槽壁上并绕自身轴线转动。
60.所述的第一传动组件用于驱使封堵板绕换药轴527的轴线方向转动且第一传动组件对应设置有两组,第一传动组件包括换药齿轮528、换药杆525、换药齿条526,所述的换药齿轮528同轴固定套设在换药轴527的外部。
61.所述的换药杆525呈竖直布置且换药杆525的下端固定安装在壳体100底端,换药杆525上开设有固定槽,所述的换药齿条526固定安装在固定槽内且换药齿条526的长度方向与换药杆525的长度方向平行并位于换药齿轮528的正下方。
62.更为具体的,所述的换药板524处于关闭状态时,两个封堵板对换药槽上开口端进行封堵;换药板524处于打开状态时,两个封堵板解除对换药槽上开口端的封堵。
63.所述的推药机构包括推药电机530、第二传动组件550、推药组件540,所述的第二传动组件用于接收推药电机530的动力并将动力传递至推药组件540,推药组件540用于将装满农药的药筒300推至换药板524上。
64.所述的推药电机530固定安装在壳体100内且推药电机530的输出轴竖直朝下。
65.所述的推药组件540包括推药轴543、传动构件、推药爪548,所述的推药轴543用于接收第二传动组件550的动力并将动力传递至传动构件,传动构件用于驱动推药爪548沿壳体100的长度方向做往复运动。
66.所述的推药爪548为半环形块状结构,推药爪548的初始位置位于环形供药板421的正上方且推药爪548、设置于环形供药板421外圆面的出药板、设置于环形供药板421上的供药口位于同一竖直平面内。
67.所述的传动构件包括承托板541、固定架545、往复轴,所述的承托板541呈水平布置且承托板541顶端开设有安装孔三,所述的安装孔三内同轴固定设置有内齿轮544。
68.所述的承托板541与壳体100底端设置有安装杆542,所述的安装杆542呈竖直布置且安装杆542的上端与承托板544固定、下端与壳体100底端固定;具体的,所述的安装杆542设置有两个并沿安装孔三的径向分布于承托板541的两侧。
69.所述的固定架545的长度方向与壳体100的长度方向平行,固定架545固定安装在承托板541的顶端,固定架545上开设有引导方向平行于自身长度的往复槽。
70.所述的往复槽内活动安装有滑动块546且两者之间构成沿往复槽引导方向的滑动导向配合。
71.所述的滑动块546与推药爪548之间设置有推药杆547且推药杆547的一端与滑动块546固定、另一端与推药爪548固定。
72.所述的往复轴呈竖直布置且往复轴外部同轴固定套设有推药齿轮549,所述的推药齿轮549为直齿轮结构并与内齿轮544啮合连接。
73.所述的往复轴的与滑动块546之间设置有约束杆一,所述的约束杆一的长度方向与往复轴轴线方向垂直,往复轴的上端与约束杆一的一端活动连接并绕自身轴线转动,约束杆一的另一端铰接在滑动块546的底端且约束杆一与滑动块546之间构成的铰接轴呈竖直布置。
74.所述的推药轴543呈竖直布置并与内齿轮544同轴布置,推药轴543的下端活动安
装在壳体100内的底端并绕自身轴线转动,推药轴543与往复轴之间设置有约束杆二,所述的约束杆二的长度方向与往复轴的轴线方向垂直且往复轴的下端与约束杆二的一端活动连接并绕自身轴线转动,约束杆二的另一端与推药轴543的上端固定连接。
75.所述的第二传动组件550设置于推药轴543与推药电机530的输出轴之间且推药轴543与推药电机530的输出轴通过第二传动组件550进行动力传递;优选的,所述的第二传动组件550为带传动组件。
76.换药装置500在实际工作过程中,当无人机喷洒装置200更换装满农药的药筒300时,开启传动电机424并牵引装满农药的药筒300向出药板与环型供药板421的连接处运动。
77.同时,传动电机424通过第三传动件517驱动任意一个驱动轴514绕自身轴线转动,并通过驱动齿轮516带动齿圈513绕自身轴线转动,齿圈513转动并通过其余的三个驱动齿轮516实现四个驱动轴541同步转动。
78.接着,驱动轴541通过曲杆组件驱使换药架521运动向换药位置运动,并通过换药轴527带动换药齿轮528与换药板524同步运动,当换药架521运动至换药位置时并将无人机自动洒药装置200内已用完的药筒300换下至换药板524上。
79.接着,驱动轴541通过驱动组件驱使换药架521由换药位置运动至接药位置,再由接药位置运动至弃药位置,在换药架521由接药位置向弃药位置运动的过程中,当换药齿轮528与换药齿条526接触并啮合连接时,随着换药齿轮528向下运动并驱使换药齿轮528绕自身轴线转动,换药齿轮528带动换药轴527同步转动,换药轴527驱使换药板524两个封堵板做相互远离的运动,直至两个封堵板接触对换药槽的封堵时,此时,换药架521运动至弃药位置,换药板524由关闭状态切换至打开状态,位于换药板524上的已用完的药筒300在自身重力作用下依次通过换药槽、弃药口掉落至外界。
80.接着,驱动轴541通过曲杆组件驱使换药架521由弃药位置向接药位置运动,当换药架521运动至接药位置时,换药板524由打开状态切换至关闭状态,同时,装满农药的药筒300运动至出药板与环型供药板421的连接处。
81.接着,推药电机530开始工作,并通过第二传动组件550带动推药轴543绕自身轴线转动,推药轴543转动并通过传动构件驱使推药爪548沿壳体100的长度方向做靠近换药板524的运动,当推药爪548与环型供药板421上已装满农药的药筒300接触时并推动已装满农药的药筒300同步运动,直至将已装满农药的药筒300从出药板推动至换药板524上,此时,推药爪548会在传动构件的驱使下做远离换药板524的运动直至运动至原始位置,推药电机530停止工作。
82.接着,驱动轴541通过曲杆组件驱使换药架521由接药位置运动至换药位置,并将换药板524上已装满农药的药筒300换上至无人机喷洒装置200内。
83.接着,驱动轴541再通过驱动组件驱使换药架521由换药位置运动至接药位置,传动电机424停止工作。
84.所述的无人机喷洒装置200包括无人机210,无人机210上安装有支撑腿220、夹持机构230,所述的夹持机构230用于药筒300的夹持携带。
85.所述的支撑腿220固定安装在无人机210的底部且所述的支撑腿220设置有四个并呈矩形结构分布。
86.更为优化的,为了能使无人机210降落至设置于壳体100上的投放口的正上方,壳
体100竖直上安装有用于对支撑腿220进行引导的定位斗240,所述的定位斗240的水平横截面积大小由下至上逐渐递增且定位斗240的下端固定安装在壳体100顶端;具体的,所述的定位斗240对应设置有四个并呈矩形机构分布且四个定位斗构成的矩形与投放口同轴线布置。
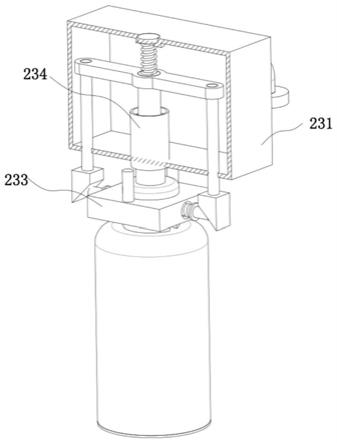
87.所述的夹持机构230设置于无人机210的底端,夹持机构230包括设置有内腔的安装壳231,安装壳231上安装有农药喷头232、夹持组件233、控制组件234,所述的农药喷头232用于将药筒300内农药喷洒至外界,夹持组件233用于对药筒300进行夹持携带,夹持组件233设置成相互切换的夹持状态与张开状态且夹持状态为初始状态,所述的控制组件234用于控制夹持组件233进行状态切换。
88.所述的安装壳231的顶端固定安装在无人机210的底端。
89.所述的夹持组件233包括夹持架2331、压持杆2336、固定杆2338,所述的夹持架2331为方形板体结构,夹持架2331的顶端与安装壳231之间设置有紧固杆,所述的紧固杆呈竖直布置且紧固杆的上端与安装壳231的底端固定、下端与夹持架2331的顶端固定。
90.所述的夹持架2331的顶端还开设有贯穿其厚度的夹持孔,夹持架2331的侧壁沿安装壳231的长度方向开设有夹持槽,所述的夹持槽与夹持孔接通;具体的,所述的夹持槽设置有两个并沿安装壳231的宽度方向对称分布于夹持架2331的两侧。
91.所述的夹持槽内活动安装有夹持杆2332,所述的夹持杆2332的长度方向与安装壳231的长度方向平行,夹持杆2332的一端延伸至夹持孔内、另一端延伸至夹持架2331的外部;具体的,夹持杆2332延伸至夹持孔内的一端为夹持杆2332的夹持端,夹持杆2332延伸至夹持架2331外部的一端为夹持杆2332的限位端,当药筒300的筒盖位于夹持孔内且夹持杆2332的夹持端位于设置于筒盖上的扣紧槽内时,夹持杆2332的夹持端位于设置于筒盖上倒角的正下方。
92.所述的夹持杆2332外部同轴固定安装有限位环且夹持杆2332外部还同轴套设有夹持弹簧2333,所述的夹持弹簧2333的一端抵触在限位环上、另一端抵触在设置于夹持槽内的内置台阶上且夹持弹簧2333的弹力驱使夹持杆2332做远离夹持孔中心线的运动。
93.更为具体的,所述的夹持组件233处于夹持状态时,夹持杆2332的夹持端位于筒盖上的扣紧槽内;夹持组件233处于张开状态时,夹持杆2332的夹持端位于扣紧槽外。
94.所述的压持杆2336位于安装壳231内且压持杆2336的长度方向与安装壳231的长度方向平行,压持杆2336的中间部位设置有套孔。
95.所述的固定杆2338呈竖直布置且固定杆2338的上端固定安装在套孔内且固定杆2338的上端面同轴开设有约束孔,所述的固定杆2338的上端设置有导向杆2337。
96.所述的导向杆2337呈竖直布置且导向杆2337的上端固定安装在安装壳231的顶端,导向杆2337的下端延伸至约束孔内且两者之间构成竖直方向的滑动导向配合。
97.所述的导向杆2337外部同轴套设有压持弹簧2339,所述的压持弹簧2339的一端抵触在安装壳231的顶端、另一端抵触在固定杆2338的上端面且压持弹簧2339驱使压持杆2336做竖直向下的运动。
98.所述的压持杆2336与夹持杆2332之间设置有连接杆2335,所述的连接杆2335呈竖直布置且连接杆2335的上端与夹持杆2332的一端固定连接,连接杆2335的下端穿过安装壳231的底端延伸至安装壳231外部且连接杆2335与安装壳231之间构成竖直方向的滑动导向
配合。
99.所述的连接杆2335的下端固定安装有引导块2334,所述的引导块2334上设置有引导斜面,所述的引导斜面与夹持孔中心线的距离由下至上逐渐递减且夹持杆2332的限位端抵触在引导斜面上。
100.所述的控制组件234设置成相互切换的伸长状态与缩短状态且伸长状态为初始状态,控制组件234包括安装套筒2341、控制杆2342、控制转筒2343,所述的安装套筒2341为上下两端开口的筒体结构并位于安装壳231内,安装套筒2341与固定杆2338同轴布置且安装套筒2341的下端固定安装在安装壳231上。
101.所述的安装套筒2341内设置有导向块2346,所述的导向块2346为弧形块状结构且导向块4246同轴固定安装在安装套筒2341内,导向块2346沿自身圆周方向依次分为导向块一、导向块三、导向块二,所述的导向块一的上端设置有伸长斜面且伸长斜面与导向块三之间的距离由下至上逐渐递增,伸长斜面上开设有引导方向为竖直方向的导向槽一且所述的导向槽一贯穿导向块一靠近安装套筒2341中心线的一侧。
102.所述的导向块三的上端设置有缩短斜面且缩短斜面与伸长斜面平行布置,并且缩短斜面最低点位于伸长斜面最高点的正下方,缩短斜面上向下开设有引导方向为竖直方向的导向槽二且所述的导向槽二贯穿导向块三靠近安装套筒2341中心线的一侧;具体的,所述的缩短斜面与导向块一之间区域构成缩短槽。
103.所述的导向块二的上端向下开设有引导方向为竖直方向的伸长槽,所述的伸长槽贯穿导向块二靠近安装套筒2341中心线的一侧;具体的,所述的导向块2346设置有若干组并沿安装套筒2341的圆周方向阵列布置且相邻两组导向块2346相互连接。
104.所述的控制杆2342与安装套筒2341同轴布置,控制杆2342的上端位于安装套筒2341内且控制杆2342的上端杆壁上固定安装有定位块,所述的定位块包括定位块一、定位块二,所述的定位块一位于导向槽一内且两者之间构成竖直方向的滑动导向配合。
105.所述的定位块二设置于导向槽二内且两者构成竖直方向的滑动导向配合;具体的,所述的定位块设置有若干组并绕控制杆2342的轴线方向均匀间隔布置。
106.所述的控制杆2342的上端固定安装有三角齿,所述的三角齿沿控制杆2342的圆周方向的两侧面之间的距离由下至上递减;具体的,所述的三角齿设置有若干个并沿控制杆2342的圆周方向阵列布置,且相邻两个三角齿之间的区域构成偏转槽。
107.所述的控制杆2342上端面竖直向下同轴开设有支撑槽,控制杆2342的下端穿过安装壳231的底端延伸至安装壳231外部并位于夹持孔的正上方。
108.所述的控制转筒2343为上端开口、下端封闭的筒体结构,控制转筒2343的上端同轴活动套接在固定杆2338外部且控制转筒2343绕自身轴线转动,控制转筒2343的下端同轴设置有支撑轴2347,所述的支撑轴2347的上端与控制转筒2343的下端面固定连接、下端位于设置于控制杆2342上的支撑槽内。
109.所述的控制转筒2343的外部固定有契合块2344,所述的契合块2344呈竖直布置并与设置于伸长槽之间构成竖直方向的滑动导向配合,契合块2344的下端设置有契合斜面,所述的契合斜面与设置于导向块三上的缩短斜面之间相互平行,且契合块2344沿控制转筒2343的圆周方向对应设置有若干个。
110.更为具体的,当控制组件234处于伸长状态时,契合块2344位于伸长槽内且夹持组
件233处于夹持状态;当控制组件234处于缩短状态时,契合块2344位于缩短槽内,契合斜面与缩短斜面接触且夹持组件233处于张开状态。
111.当无人机喷洒装置200携带的药筒300内农药喷洒完后,无人机210通过定位斗240稳定降落至设置于壳体100上投放口的正上方,并使已用完的药筒300底端穿过投放口位于壳体100内,换药架521在由接药位置向换药位置运动的过程中,当换药板524接触到已用完的药筒300的底端时将会给已用完的药筒300一个向上的托力并驱使药筒300一起向上运动。
112.接着,已用完的药筒300通过筒盖推动控制杆2342向上运动,当设置于控制杆2342上三角齿的齿面上端与设置于契合块2344上的契合斜面下端接触时并通过契合块2344给控制转筒2343一个竖直向上的推力,控制转筒2343会在推力的作用下通过固定杆2338克服压持弹簧2339的弹力并通过导向杆2337的引导下做竖直向上的运动,固定杆2338运动并带动压持杆2336同步运动,压持杆2336向上运动并通过连接杆2335带动引导块2334同步向上运动,在引导块2334向上运动的同时,夹持杆2332会在夹持弹簧2333的弹力作用下做远离夹持孔中心线的运动且两个夹持杆2332做相互远离的运动。
113.在控制转筒2343向上运动的同时,契合块2344在伸长槽内做竖直向上运动,当契合块2344脱离伸长槽时且契合斜面的下端与设置于导向块三上的缩短斜面的上端处于同一水平高度时,契合块2344会在三角齿的齿面引导作用下向下运动并绕控制杆2342的圆周方向发生旋转,直至契合块2344的契合斜面下端运动至偏转槽的槽底时,契合块2344停止偏转,此时契合斜面的下端偏转至缩短斜面的正上方,换药架521运动至换药位置。
114.接着,换药架521由换药位置向弃药位置运动,已用完的药筒300会在自身的重力作用下向下运动,引导块2334会在压持弹簧2339弹力作用下做竖直向下的运动,夹持杆2332的限位端会在引导斜面的引导作用下并克服夹持弹簧2333的弹力驱使夹持杆2332做靠近夹持孔中心线的运动,从而使两个夹持杆2332做相互靠近的运动。
115.同时,固定杆2338在压持弹簧2339的弹力作用下做竖直向下的运动,并通过控制转筒2343带动契合块2344同步向下运动,当契合斜面的下端与缩短斜面接触时,契合块2344会在缩短斜面的引导下驱使控制转筒2343绕自身轴线发生转动,直至契合斜面的下端运动至缩短槽的槽底时,控制转筒2343停止转动,夹持杆2332停止运动,此时,夹持杆2332的夹持端与夹持孔的孔壁之间的最小距离小于筒盖的外圆周面与夹持孔的孔壁之间的距离,夹持组件233由夹持状态切换至张开状态,控制组件234由伸长状态切换至缩短状态,已用完的药筒300与换药板524向换药架521的弃药位置运动,并将已用完的药筒300向外界排出。
116.一种无人机农药筒自动更换机在实际工作过程中:当无人机喷洒装置200携带的药筒300内农药喷洒完后,无人机210通过定位斗240稳定降落至设置于壳体100上投放口的正上方,并使已用完的药筒300底端穿过投放口位于壳体100内。
117.接着,开启传动电机424,传动电机424输出轴驱动连动杆4291同步转动,连动杆4291转动带动拨动块4293同步转动,当拨动块4293转动至设置于供药转盘427上的驱动槽内时,将会在两者的滑动导向配合下驱使供药转盘427沿自身圆周方向转动,供药转盘427转动驱使供药轴425同步转动,供药轴425转动并通过供药杆426带动设置于供药杆426上的
弧形拨块在环型供药板421上同步转动。
118.于此同时,供药轴425转动通过第一传动机构430带动传药轴414绕自身轴线方向转动,传药轴414通过第一传动件415带动传动轴416同步转动,传动轴416通过第二传动件417驱动任一传药辊轴412绕自身轴线转动,并通过两个传药辊轴412的驱使下带动传药带413开始转动。
119.将装满农药的药筒300放在传药带413上并在传药带413的牵引下运动向环形供药板421方向运动,当装满农药的药筒300运动至设置于环型供药板421上的供药口处时,弧形拨块运动至供药口处且装满农药的药筒300在弧形拨块的拨动下在环型供药板421上沿环型供药板421的圆周方向运动,直至将装满农药的药筒300运动到出药板与环型供药板421的连接处。
120.在装满农药的药筒300向出药板421运动的同时,换药装置500的换药机构520中换药架521在驱动机构510的驱动下由接药位置运动至换药位置并使夹持组件233由夹持状态切换至张开状态,并将已用完的药筒300换下。
121.传动电机424通过第三传动件517驱动任意一个驱动轴514绕自身轴线转动,并通过驱动齿轮516带动齿圈513绕自身轴线转动,齿圈513转动并通过其余的三个驱动齿轮516实现四个驱动轴541同步转动。
122.驱动轴541通过曲杆组件驱使换药架521运动向换药位置运动,并通过换药轴527带动换药齿轮528与换药板524同步运动直至换药架521运动至换药位置,换药架521在由接药位置向换药位置运动的过程中,当换药板524接触到已用完的药筒300的底端时将会给已用完的药筒300一个向上的托力并驱使药筒300一起向上运动。
123.已用完的药筒300向上运动并使控制组件234由伸长状态切换至缩短状态,同时夹持组件233由夹持状态切换至张开状态并解除对药筒300筒盖的夹持,药筒300在自身重力作用下掉落至换药板524上。
124.驱动轴541通过驱动组件驱使换药架521由换药位置运动至接药位置,再由接药位置运动至弃药位置,在换药架521由接药位置向弃药位置运动的过程中,已用完的药筒300与换药板524同步运动,当换药齿轮528与换药齿条526接触并啮合连接时,随着换药齿轮528向下运动并驱使换药齿轮528绕自身轴线转动,换药齿轮528带动换药轴527同步转动,换药轴527驱使换药板524两个封堵板做相互远离的运动,直至两个封堵板接触对换药槽的封堵时,此时,换药架521运动至弃药位置,换药板524由关闭状态切换至打开状态,位于换药板524上的已用完的药筒300在自身重力作用下依次通过换药槽、弃药口掉落至外界。
125.接着,驱动轴541通过曲杆组件驱使换药架521由弃药位置向接药位置运动,当换药架521运动至接药位置时,换药板524由打开状态切换至关闭状态,同时,装满农药的药筒300运动至出药板与环型供药板421的连接处。
126.接着,推药电机530开始工作,并通过第二传动组件550带动推药轴543绕自身轴线转动,推药轴543转动并通过传动构件驱使推药爪548沿壳体100的长度方向做靠近换药板524的运动,当推药爪548与环型供药板421上已装满农药的药筒300接触时并推动已装满农药的药筒300同步运动,直至将已装满农药的药筒300从出药板推动至换药板524上,此时,推药爪548会在传动构件的驱使下做远离换药板524的运动直至运动至原始位置,推药电机530停止工作。
127.驱动轴541通过曲杆组件驱使换药架521由接药位置运动至换药位置,夹持组件233对药筒300的筒盖进行夹持携带。
128.接着,驱动轴541再通过驱动组件驱使换药架521由换药位置运动至接药位置,传动电机424停止工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1