一种连栋温室变距调高植保机器人及控制方法
1.本技术涉及设施农业智能装备技术领域,具体涉及一种连栋温室变距调高植保机器人及控制方法。
背景技术:
2.我国是世界上最大的设施蔬菜生产基地,从20世纪末至今,无论是种植规模还是相应的产量都取得突飞猛进的发展,我国设施蔬菜产业从无跃居至世界前列。在设施蔬菜生产过程中,病虫害多发的问题,成为严重制约产量和效益提升的重要因素。
3.目前,生产中多采用化学防治措施,喷洒农药是常用的方法。然而,国内大多温室喷药仍以人工或半自动机械为主。依靠传统的生产方式进行喷药作业,存在一系列的问题。第一,人工效率低、劳动强度大,增加了生产成本;第二,温室相对封闭,难以实现人药分离,影响人体的健康;第三,人工喷药随机性较高,喷洒不均匀。
4.现有的植保机械虽然在一定程度上解决了上述存在的问题,但是无法实现在作物不同高度、不同生长期进行智能化喷药。因此现阶段急需一种能够在作物不同高度、不同生长期下的智能化温室喷药装置,从而实现在温室内高效智能化喷药。
技术实现要素:
5.本技术为了解决上述技术问题,提出了如下技术方案:
6.第一方面,本技术实施例提供了一种连栋温室变距调高植保机器人,包括:行走装置,设置在所述行走装置行进端的双边移动变距装置,所述双边移动变距装置上设置分段喷雾装置。
7.采用上述实现方式,采用双边移动变距装置可以实现对喷雾装置的推拉,调节与喷药作物之间的距离。分段喷雾装置可实现不同高度的分段喷药,进而可以在喷药距离调节完毕后,控制分段喷雾装置根据作物的高度进行分段喷药,提高了药液的利用率,实现了在作物不同高度、不同生长期下的温室内高效智能化喷药。
8.结合第一方面,在第一方面第一种可能的实现方式中,所述双边移动变距装置包括设置在所述行走装置上的直线滑轨,所述直线滑轨两端分别设置有第一移动方管和第二移动方管,所述第一移动方管与所述第二移动方管分别与所述直线滑轨滑动连接;所述直线滑轨中间位置对应的行走装置上设置有支撑方管,所述支撑方管上设置有丝杆滑台,所述丝杆滑台与所述第一移动方管和所述第二移动方管之间分别设置有连接杆,所述连接杆的第一端与所述丝杆滑台滑动连接,所述连接杆的第二端与移动方管活动连接。双边移动变距装置通过竖直放置的丝杆滑台提供向上驱动力,同时带动连接杆向两侧推拉移动方管,使得移动方管快速向两侧移动。
9.结合第一方面第一种可能的实现方式,在第一方面第二种可能的实现方式中,所述第一移动方管和第二移动方管底端设置有水平移动滑块,所述水平移动滑块与移动方管通过螺栓固定连接,所述水平移动滑块通过工字型凹槽卡设在所述直线滑轨上;所述丝杆
滑台上设置有竖直移动滑块,所述竖直移动滑块与所述丝杆滑台滑动连接,所述连接杆的第一端与所述竖直移动滑块活动连接。
10.结合第一方面第一或二种可能的实现方式,在第一方面第三种可能的实现方式中,所述分段喷雾装置包括卧式水桶、水泵和喷杆,所述卧式水桶和水泵固定设置在所述行走装置上,所述水泵分别与所述卧式水桶和所述喷杆相连通,所述喷杆固定设置在移动方管上。卧式水桶和水泵为喷杆提供药液,喷杆固定在移动方管,可随移动方管移动,提高了喷药的效率。
11.结合第一方面第三种可能的实现方式,在第一方面第四种可能的实现方式中,所述喷杆上均匀设置有多个喷头,所述喷头之间设置有电磁阀,对应每个电磁阀设置有激光模块,所述激光模块安装在所述电磁阀同水平面内侧。将喷头在喷杆自上往下等间距分布,布局合理,喷药更加均匀,并通过激光模块检测作物高度,控制开启不同电磁阀完成分段喷药,极大地减少了农药的浪费,提高药液的利用率。
12.结合第一方面第三种可能的实现方式,在第一方面第五种可能的实现方式中,所述卧式水桶设置在所述行走装置的中部位置,水泵安装于丝杆滑台与卧式水桶之间,所述卧式水桶、水泵与喷杆三者通过软性水管相连通。
13.结合第一方面或第一方面第一五种任一可能的实现方式,在第一方面第六种可能的实现方式中,所述行走装置底部设置有导航定位装置,所述导航定位装置控制植保机器人在规划的路径上进行移动;所述导航定位装置包括扫码模块和姿态传感器,所述扫码模块和所述姿态传感器分别与控制器通讯连接;行走装置行走路线铺设路线条形码,所述扫码模块扫描所述条形码进行路线导航。扫码模块使得行走装置可以精确的定位轨道行数,姿态传感器可为控制器控制连栋温室变距调高植保机器人行走提供更加精准稳定的角度数据,从而实现在规划路径上的精准的直线导航和原地转向,进一步提高了连栋温室变距调高植保机器人导航定位的可靠性。
14.结合第一方面第六种可能的实现方式,在第一方面第七种可能的实现方式中,所述行走装置上还设置有人机交互系统,所述人机交互系统设置有操控触摸屏,所述操控触摸屏与所述控制器通信连接。通过人机交互系统的操控触摸屏设置连栋温室变距调高植保机器人的作业参数,确定连栋温室变距调高植保机器人后续作业范围、路径等。
15.第二方面,本技术实施例提供了一种连栋温室变距调高植保机器人控制方法,控制第一方面或第一方面任一可能实现方式所述的连栋温室变距调高植保机器人,所述方法包括:连栋温室变距调高植保机器人通电后,通过人机交互控制系统的启动按钮对机器人进行启动;通过导航定位装置和铺设在线路上的条形码控制植保机器人在规划的路径上行走;当连栋温室变距调高植保机器人到达标记行数时,扫码模块将扫描到的条形码信息传输至控制器,控制器控制所述连栋温室变距调高植保机器人上轨;在轨道上进行作业时,控制器通过处理激光模块检测作物高度信息,控制双边移动变距装置和分段喷雾装置进行喷药作业;连栋温室变距调高植保机器人即将下轨时,控制系统记录姿态传感器的角度数据;下轨后在导航定位装置控制下继续直线行驶;当扫描到该轨道前的条形码时,将植保机器人前部转向垂直于轨道方向,继续执行自主导航直线行驶步骤,完成自动换行作业。
16.结合第二方面,在第二方面第一种可能的实现方式中,所述在轨道上进行作业时,控制器通过处理激光模块检测作物高度信息,控制双边移动变距装置和分段喷雾装置进行
喷药作业,包括:控制器处理来自激光模块采集的信息,判断当前作物高度,并控制控制电磁阀的通断,实现两喷杆分段喷雾实时采集的喷头与植株之间的距离;当距离值大于设定的喷药距离值时,控制丝杆滑台上的竖直移动滑块向上移动,同时带动两连接杆向外推动喷杆在直线滑轨上向外移动;或者,当距离值小设定的喷药距离值时,控制丝杆滑台上的竖直移动滑块向下移动,带动两连接杆向内拉动喷杆在直线滑轨上向内移动。
附图说明
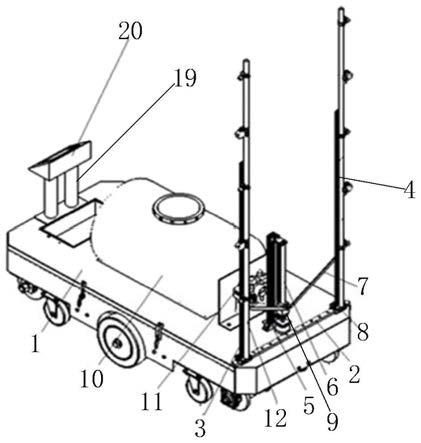
17.图1为本技术实施例提供的一种连栋温室变距调高植保机器人的结构示意图;
18.图2为本技术实施例提供的水泵、卧式水桶连接示意图;
19.图3为本技术实施例提供的喷杆结构示意图;
20.图4为本技术实施例提供的导航定位装置示意图
21.图5为本技术实施例提供的一种连栋温室变距调高植保机器人控制方法流程示意图;
22.图1
‑
5中,符号表示为:
[0023]1‑
行走装置,2
‑
直线滑轨,3
‑
第一移动方管,4
‑
第二移动方管,5
‑
支撑方管,6
‑
丝杆滑台,7
‑
连接杆,8
‑
水平移动滑块,9
‑
竖直移动滑块,10
‑
卧式水桶,11
‑
水泵,12
‑
喷杆,13
‑
软性水管,14
‑
喷头,15
‑
电磁阀,16
‑
激光模块,17
‑
扫码模块,18
‑
姿态传感器,19
‑
人机交互系统,20
‑
操控触摸屏。
具体实施方式
[0024]
下面结合附图与具体实施方式对本方案进行阐述。
[0025]
图1为本技术实施例提供的一种连栋温室变距调高植保机器人的结构示意图,参见图1,本实施例中的连栋温室变距调高植保机器人包括:行走装置1,设置在所述行走装置1行进端的双边移动变距装置,所述双边移动变距装置上设置分段喷雾装置。
[0026]
本实施例中,所述双边移动变距装置包括设置在所述行走装置1上的直线滑轨2,所述直线滑轨2两端分别设置有第一移动方管3和第二移动方管4,所述第一移动方管3与所述第二移动方管4分别与所述直线滑轨2滑动连接。所述直线滑轨2中间位置对应的行走装置1上设置有支撑方管5,所述支撑方管5上设置有丝杆滑台6,所述丝杆滑台6与所述第一移动方管3和所述第二移动方管4之间分别设置有连接杆7。所述连接杆7的第一端与所述丝杆滑台6滑动连接,所述连接杆7的第二端与移动方管活动连接。双边移动变距装置通过竖直放置的丝杆滑台6提供向上驱动力,同时带动连接杆7向两侧推拉移动方管,使得移动方管快速向两侧移动。
[0027]
进一步地,所述第一移动方管3和第二移动方管4底端设置有水平移动滑块8,所述水平移动滑块8与移动方管通过螺栓固定连接,所述水平移动滑块8通过工字型凹槽卡设在所述直线滑轨2上。所述丝杆滑台6上设置有竖直移动滑块9,所述竖直移动滑块9与所述丝杆滑台6滑动连接,所述连接杆7的第一端与所述竖直移动滑块9活动连接。
[0028]
所述分段喷雾装置包括卧式水桶10、水泵11和喷杆12,所述卧式水桶10和水泵11固定设置在所述行走装置1上。参见图2,所述卧式水桶10设置在所述行走装置1的中部位置,水泵11安装于丝杆滑台6与卧式水桶10之间,所述卧式水桶10、水泵11与喷杆12三者通
过软性水管13相连通。所述水泵11分别与所述卧式水桶10和所述喷杆12相连通,所述喷杆12固定设置在移动方管上。卧式水桶10和水泵11为喷杆12提供药液,喷杆12固定在移动方管,可随移动方管移动,提高了喷药的效率。
[0029]
参见图3,所述喷杆12上均匀设置有多个喷头14,所述喷头14之间设置有电磁阀15,对应每个电磁阀15设置有激光模块16,所述激光模块16安装在所述电磁阀15同水平面内侧。将喷头14在喷杆12自上往下等间距分布,布局合理,喷药更加均匀,并通过激光模块16检测作物高度,控制开启不同电磁阀15完成分段喷药,极大地减少了农药的浪费,提高药液的利用率。
[0030]
本实施例中,所述行走装置1底部设置有导航定位装置,所述导航定位装置控制植保机器人在规划的路径上进行移动。参见图4,所述导航定位装置包括扫码模块17和姿态传感器18,所述扫码模块17和所述姿态传感器18分别与控制器通讯连接;行走装置1行走路线铺设路线条形码,所述扫码模块17扫描所述条形码进行路线导航。
[0031]
扫码模块17使得行走装置1可以精确的定位轨道行数,姿态传感器18可为控制器控制连栋温室变距调高植保机器人行走提供更加精准稳定的角度数据,从而实现在规划路径上的精准的直线导航和原地转向,进一步提高了连栋温室变距调高植保机器人导航定位的可靠性。
[0032]
所述行走装置1上还设置有人机交互系统19,所述人机交互系统19设置有操控触摸屏20,所述操控触摸屏20与所述控制器通信连接。通过人机交互系统19的操控触摸屏20设置连栋温室变距调高植保机器人的作业参数,确定连栋温室变距调高植保机器人后续作业范围、路径等。
[0033]
由上述实施例可知,本实施例提供的连栋温室变距调高植保机器人通过人机交互系统19设置连栋温室变距调高植保机器人的作业参数,通过行走装置1提供行走动力。在路面行走过程中,其导航定位装置不断向控制器反馈当前位置信息。控制器接收信息并发出控制指令,控制直线行走、原地转向等动作,以此完成路面导航。在轨道行走过程中,连栋温室变距调高植保机器人利用激光模块16检测作物高度,并将检测的信息传输至控制器,控制器接收数据信息并发出控制指令,控制双边移动变距装置以及双杆分段喷雾装置进行移动变距喷药,以此完成精准对靶喷药。
[0034]
与上述实施例提供的一种连栋温室变距调高植保机器人相对应,本技术还提供了一种连栋温室变距调高植保机器人控制方法的实施例。参见图5,所述方法包括:
[0035]
s101,连栋温室变距调高植保机器人通电后,通过人机交互控制系统的启动按钮对机器人进行启动。
[0036]
按下启动按钮,系统进行初始化。姿态传感器根据植保机器人产生的噪声,对数据进行优化,并将角度数据传输至控制器,完成姿态传感器的初始化;控制器向扫码模块发出连续扫描指令,扫码模块向控制器反馈接收数据成功指令,完成扫码模块的初始化;上述导航定位装置的初始化结束后,控制器控制双边移动变距装置进行一次完整行程的双边移动,即将两喷杆推到最远端再拉回最近段,同时控制电磁阀自下往上的一次通电断电,从而完成双边移动变距装置与双杆分段喷雾装置的初始化。上述装置及传感器若初始化失败,控制器则接收不到返回数据,将会通过人机交互系统的蜂鸣器进行报警。
[0037]
s102,通过导航定位装置和铺设在线路上的条形码控制植保机器人在规划的路径
上行走。
[0038]
连栋温室变距调高植保机器人的定位需要在换行移动路径关键点上铺设条形码,关键点为温室地面与株间两条当中心线的交点。条形码用来标记轨道编号,作为路径规划的标记点。连栋温室变距调高植保机器人在温室路面上移动过程中,通过姿态传感器实时采集当前行进角度。当植保机器人偏离行进路线时,姿态传感器的角度将会发生变化,控制器通过对底盘左右轮进行差速控制,使连栋温室变距调高植保机器人的行进方向回到规划的路径方向。连栋温室变距调高植保机器人在规划的路径行进过程中,将会利用扫码模块不断地向地面进行扫描,并将扫描的数据实时传输至控制器,以此得到当前位置信息。
[0039]
s103,当连栋温室变距调高植保机器人到达标记行数时,扫码模块将扫描到的条形码信息传输至控制器,控制器控制所述连栋温室变距调高植保机器人上轨。
[0040]
连栋温室变距调高植保机器人到达标记行数时,扫码模块将扫描到的条形码信息传输至控制器,控制器接收到信息,控制植保机器人停止移动。控制系统根据车轮的周长以及姿态传感器的角度,对底盘行走装置的左右轮进行正反转控制,完成原地转向90度,即将植保机器人前部转向轨道。转向完成后,植保机器人继续前进至轨道,完成自动上轨动作。
[0041]
s014,在轨道上进行作业时,控制器通过处理激光模块检测作物高度信息,控制双边移动变距装置和分段喷雾装置进行喷药作业。
[0042]
连栋温室变距调高植保机器人在轨道上进行作业时,利用激光模块检测作物高度,并将采集信息传输至控制器。控制器处理来自激光模块采集的信息,判断当前作物高度,并控制控制四个电磁阀的通断,实现两喷杆分段喷雾。控制系统判断实时采集的喷头与植株距离是否为最佳喷药距离,根据需要进行变距调节。当距离值大于设定的最佳喷药距离值时,控制器丝杆滑台上的滑块向上移动,同时带动两连接杆向外推动喷杆在直线滑轨上向外移动;当距离值小设定的最佳喷药距离值时,控制器丝杆滑台上的滑块向下移动,带动两连接杆向内拉动喷杆在直线滑轨上向内移动。控制系统同时控制分段喷雾与双边移动变距两部分,实现双杆分段变距喷药作业。
[0043]
s105,连栋温室变距调高植保机器人即将下轨时,控制系统记录姿态传感器的角度数据;下轨后在导航定位装置控制下继续直线行驶;当扫描到该轨道前的条形码时,将植保机器人前部转向垂直于轨道方向,继续执行自主导航直线行驶步骤,完成自动换行作业。
[0044]
直线行驶过程中,扫码模块不断地向地面方向扫描,当扫描到该轨道前的条形码时,控制系统根据车轮的周长以及姿态传感器的角度,对底盘行走装置的左右轮进行正反转控制,完成原地转向90度,将植保机器人前部转向垂直于轨道方向,进而继续执行自主导航直线行驶步骤。
[0045]
需要说明的是,在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0046]
当然,上述说明也并不仅限于上述举例,本技术未经描述的技术特征可以通过或
采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本技术的技术方案并非是对本技术的限制,如来替代,本技术仅结合并参照优选的实施方式进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本技术的实质范围内所做出的变化、改型、添加或替换都不脱离本技术的宗旨,也应属于本技术的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1