一种智能食用菌出菇管理系统的制作方法
1.本实用新型涉及食用菌生产领域,具体涉及一种智能食用菌出菇管理系统。
背景技术:
2.我国食用菌种植模式渐渐由农户转向工厂化,目前食用菌出菌管理模式还是依靠人工注水和人工采摘,需要大量的人工操作。注水操作需要人工一棒棒的从架子上拿下来,注完水后再一帮帮拿上架子,非常繁琐,劳动强度也非常高;采摘时也需要大量人工,每个菇架有6层高,下面几层搬运或采摘时需要弯腰,上面几层搬运或采摘时有不够高的现象,并且现在采摘的工人大多是老人和妇女,劳动强度太大会非常影响采摘效率。而且采摘后的菌类还需要人工筛选、剪菇脚的工序,十分麻烦。
技术实现要素:
3.本实用新型的目的是克服现技术的缺陷和不足,提供一种自动化程度高、可实现自动注水、自动采摘和自动分类、自动剪菇脚的智能食用菌出菇管理系统。
4.为实现以上目的,本实用新型的技术解决方案是:一种智能食用菌出菇管理系统,其特征在于:包括出菇架和食用菌注水装置,所述食用菌注水装置包括注水组件总成和水槽,所述出菇架位于水槽的两侧,出菇架由若干组自动旋转架组成,所述自动旋转架包括设置在机架内部的多个菌棒托盘和驱动菌棒托盘旋转的托盘旋转装置。
5.所述托盘旋转装置包括固定菌棒托盘的旋转臂总成以及旋转臂驱动装置,所述旋转臂驱动装置包括驱动电机和大皮带轮,所述驱动电机的电机轴上套接有驱动电机皮带轮,所述驱动电机皮带轮通过三角带和大皮带轮传动连接,所述大皮带轮和旋转臂总成传动连接。
6.所述旋转臂总成包括两个对称设置的
“✲”
形旋转臂和主轴,所述旋转臂套接在主轴的两端上,所述主轴的两端通过主轴带座轴承固定在机架上,所述主轴伸出机架的一端与大皮带轮传动连接。
7.所述旋转臂包括多个支臂,所述菌棒托盘的两端分别与位于同一水平线上的两条支臂固定连接。
8.所述注水组件总成包括水泵、针管座、针管和针管座位移装置,所述水泵通过水管与针管座相连通,所述针管插接在针管座的外侧并与针管座的内部相连通,所述针管座滑动连接在针管座位移装置上。
9.所述针管座位移装置包括x轴向位移装置和y轴向位移装置,所述x轴向位移装置包括x轴导轨、x轴滑块安装板、x轴驱动电机和x轴驱动齿条,所述x轴滑块安装板通过x轴滑块滑动连接在x轴导轨上,x轴驱动齿条位于x轴导轨内侧,所述x轴驱动电机固定安装在x轴滑块安装板上,x轴驱动电机的电机轴上套接有x轴驱动电机齿轮,所述x轴驱动电机齿轮与x轴驱动齿条相啮合;所述y轴向位移装置包括y轴导轨、y轴滑块安装板、y轴驱动电机和y轴驱动齿条,所述y轴导轨和y轴驱动齿条固定安装在x轴滑块安装板上,所述y轴滑块安装板
通过y轴滑块滑动连接在y轴导轨上,所述y轴驱动电机的电机轴上套接有y轴驱动电机齿轮,所述y轴驱动电机齿轮与y轴驱动齿条相啮合,所述针管座固定安装在y轴滑块安装板上。
10.所述针管座包括左针管座和右针管座,所述左针管座和右针管座分别固定在y轴滑块安装板的两侧,所述y轴驱动电机位于左针管座和右针管座之间,所述针管分别插接在左针管座和右针管座的外侧。
11.所述水槽内间隔设置有隔板,所述隔板上设置有供水泵通过的槽口。
12.所述出菇架的外侧设置有自动采摘机构,所述自动采摘机构包括采摘机构机架和采摘机器人,所述采摘机构机架上安装有分类传输带总成,采摘机构机架两侧顶部安装有导轨,所述采摘机器人固定在机器人安装座板上,所述机器人安装座板通过滑块滑动连接在导轨上。
13.所述采摘机器人一侧的机器人安装座板上设置有自动菇腿剪刀。
14.本实用新型与现有技术相比,具有以下优点:
15.1、本实用新型使用自动旋转架+双向运动注水机的配合来为菌棒进行注水操作,通过驱动电机驱动自动旋转架上的菌棒托盘旋转,通过针管座位移装置对位于水槽两侧的菌棒进行注水操作,这样的设置既提高了菌棒注水速度,同时设备的高度自动化也将用工数量和工人的劳动强度降到了最低,大大节省了生产成本。
16.2、本实用新型将菌棒托盘放在自动旋转架上,在需要人工采摘食用菌的时候,工人不用弯腰也不用踮脚就可以轻松采摘,甚至还可以坐在凳子上采摘,采摘非常方便,同时工人的劳动强度也大为降低。
17.3、本实用新型使用x轴向位移装置和y轴向位移装置来控制针管座的运动,导轨+齿轮齿条传动的组合使得针管座的运行更加顺畅,能耗也更低。
18.4、本实用新型在出菇架外侧设置自动采摘机构,采摘机器人采摘菌类,自动菇腿剪刀进行剪腿操作,采摘后的菌类通过分类传输带总成进行分类运输,整个采摘过程自动化程度高,基本不需要人工操作。
附图说明
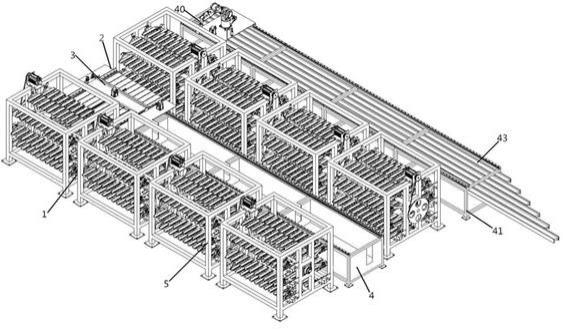
19.图1是本实用新型的机构示意图。
20.图2是本实用新型中自动旋转架的结构示意图。
21.图3是本实用新型中自动旋转架的机架部分结构示意图。
22.图4是本实用新型中食用菌注水装置的结构示意图一。
23.图5是本实用新型中食用菌注水装置的结构示意图二。
24.图6是本实用新型中自动采摘机构的部分结构示意图。
25.图中:出菇架1,食用菌注水装置2,注水组件总成3,水槽4,自动旋转架5,机架6,菌棒托盘7,托盘旋转装置8,旋转臂总成9,旋转臂驱动装置10,驱动电机11,大皮带轮12,驱动电机皮带轮13,旋转臂14,主轴15,主轴带座轴承16,支臂17,水泵18,针管座19,针管20,针管座位移装置21,x轴向位移装置22,y轴向位移装置23,x轴导轨24,x轴滑块安装板25,x轴驱动电机26,x轴驱动齿条27,x轴滑块28,x轴驱动电机齿轮29,y轴导轨30,y轴滑块安装板31,y轴驱动电机32,y轴驱动齿条33,y轴滑块34,y轴驱动电机齿轮35,左针管座36,右针管
座37,隔板38,槽口39,自动采摘机构40,采摘机构机架41,采摘机器人42,分类传输带总成43,导轨44,机器人安装座板45,滑块46,自动菇腿剪刀47。
具体实施方式
26.以下结合附图说明和具体实施方式对本实用新型作进一步详细的说明。
27.参见图1
‑
图6,一种智能食用菌出菇管理系统,包括出菇架1和食用菌注水装置2,所述食用菌注水装置2包括注水组件总成3和水槽4,所述出菇架1位于水槽4的两侧,出菇架1由若干组自动旋转架5组成,所述自动旋转架5包括设置在机架6内部的多个菌棒托盘7和驱动菌棒托盘7旋转的托盘旋转装置8。
28.所述托盘旋转装置8包括固定菌棒托盘7的旋转臂总成9以及旋转臂驱动装置10,所述旋转臂驱动装置10包括驱动电机11和大皮带轮12,所述驱动电机11的电机轴上套接有驱动电机皮带轮13,所述驱动电机皮带轮13通过三角带和大皮带轮12传动连接,所述大皮带轮12和旋转臂总成9传动连接,所述旋转臂总成9包括两个对称设置的
“✲”
形旋转臂14和主轴15,所述旋转臂14套接在主轴15的两端上,所述旋转臂14包括多个支臂17,所述菌棒托盘7的两端通过托盘支架和带座轴承分别与位于同一水平线上的两条支臂17固定连接,保证在主轴旋转时,菌棒托盘7时刻保持平衡,不会翻落。所述主轴15的两端通过主轴带座轴承16固定在机架6上,所述主轴15伸出机架6的一端与大皮带轮12传动连接。
29.所述注水组件总成3包括水泵18、针管座19、针管20和针管座位移装置21,所述水槽4内间隔设置有隔板38,所述隔板38上设置有供水泵18通过的槽口39,所述水泵18通过水管与针管座19相连通,所述针管20插接在针管座19的外侧并与针管座19的内部相连通,所述针管座19滑动连接在针管座位移装置21上,所述针管座位移装置21包括x轴向位移装置22和y轴向位移装置23,所述x轴向位移装置22包括x轴导轨24、x轴滑块安装板25、x轴驱动电机26和x轴驱动齿条27,所述x轴滑块安装板25通过x轴滑块28滑动连接在x轴导轨24上,x轴驱动齿条27位于x轴导轨24内侧,所述x轴驱动电机26固定安装在x轴滑块安装板25上,x轴驱动电机26的电机轴上套接有x轴驱动电机齿轮29,所述x轴驱动电机齿轮29位于x轴滑块安装板25底部并与x轴驱动齿条27相啮合;所述y轴向位移装置23包括y轴导轨30、y轴滑块安装板31、y轴驱动电机32和y轴驱动齿条33,所述y轴导轨30和y轴驱动齿条33固定安装在x轴滑块安装板25上,所述y轴滑块安装板31通过y轴滑块34滑动连接在y轴导轨30上,所述y轴驱动电机32固定安装在y轴滑块安装板31上,y轴驱动电机32的电机轴上套接有y轴驱动电机齿轮35,所述y轴驱动电机齿轮35位于y轴滑块安装板31底部并与y轴驱动齿条33相啮合,所述针管座19包括左针管座36和右针管座37,所述左针管座36和右针管座37分别固定在y轴滑块安装板31的两侧,所述y轴驱动电机32位于左针管座36和右针管座37之间,所述针管20分别插接在左针管座36和右针管座37的外侧。
30.所述出菇架1的外侧设置有自动采摘机构40,所述自动采摘机构40包括采摘机构机架41、采摘机器人42和自动菇腿剪刀47,所述采摘机构机架41上安装有分类传输带总成43,分类传输带总成43上设置有多条运输轨道,采摘机构机架41两侧顶部安装有导轨44,所述采摘机器人42和自动菇腿剪刀47固定在机器人安装座板45上,所述机器人安装座板45通过滑块46滑动连接在导轨44上。所述机器人安装座板45上还安装有伺服电机,所述伺服电机通过其上的伺服电机齿轮与安装在导轨46内侧的齿条相啮合,以方便机器人安装座板45
的行进和后退。
31.工厂在进行食用菌培育时,将种有菌种的菌棒放在菌棒托盘7上,当需要进行注水操作时,驱动电机11通过驱动电机皮带轮13和三角带带动大皮带轮12转动,进而带动整个自动旋转架5绕主轴15旋转,机架6上的传感器会将菌棒托盘7精确定位到与针管20持平的位置,此时,y轴驱动电机32带动其上的y轴驱动电机齿轮35转动,并通过与之啮合的y轴驱动齿条33带动y轴滑块安装板31沿着y轴导轨30运动,当需要为左侧的菌棒注水时,y轴滑块安装板31运动到左侧,水泵18通过水管向左针管座36注水,在通过针管20注入到菌棒中,当需要为右侧的菌棒注水时,也是一样的道理。设计好的程序会控制驱动电机11的旋转速度和旋转时间位置,从而控制每层菌棒的停留位置及停留时间,方便后续自动注水和自动采摘定位的精确性。当食用菌注水装置2为前排菇架1上的菌棒注水完毕后,x轴驱动电机26带动其上的x轴驱动电机齿轮29转动,并通过与之啮合的x轴驱动齿条27带动x轴滑块安装板25沿着x轴导轨24向后排菇架1运动。
32.所述采摘机器人42上安装有摄像头,摄像头自动扫描菌棒,通过图像识别技术,识别出需要采摘的菌类颜色、大小,并把区分的菌类放置在预先设置的运输轨道上;机器人采摘的菌类如需剪脚,可以自动将菌类放入自动菇腿剪刀47,剪刀驱动气缸驱动剪刀做剪腿的动作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1