全自动植树机器人
1.本实用新型属于农林机械设备技术领域,尤其是涉及一种全自动植树机器人。
背景技术:
2.荒漠化是全球性的环境问题,我国是世界上受荒漠化最为严重的国家之一。我国西北沙漠化了的土地,在西北风的席卷之下,成为了京津冀老百姓最熟悉的沙尘暴。我国西北地区荒漠化的发展,已经给我国广大荒漠化地区的生态环境、资源、社会经济发展与人民群众的生产生活造成了严重的危害与威胁,甚至危及到周边居民的生存,阻碍着我国的可持续发展。因此,加强对荒漠化的防治对我国促进生态平衡、经济发展有着十分重要的作用。现阶段胡杨苗的种植主要靠原始劳动力,种树人的工作环境极端恶劣。 此时急需一种机器人来替代他们的体力劳动。
技术实现要素:
3.本实用新型的目的是提供一种一体化程度高、植树精准,连续性好,树苗存活率高的全自动植树机器人。
4.本实用新型的目的是通过下述技术方案来实现的:
5.本实用新型的全自动植树机器人,其特征在于包括两组支撑底盘装置,设置在此两组支撑底盘装置1上且位于后端的一体化多功能套筒,设置在此一体化多功能套筒上方的树苗分选旋转装置,设置在所述两组支撑底盘装置上且位于前端的浇水储水装置和太阳能供储能装置,
6.每组支撑底盘装置包括三角支撑板,分别设置在此三角支撑板两个角的两组车轮组,分别与每组车轮组相连接的电机,
7.所述的一体化多功能套筒包括舵机ⅰ,与此舵机ⅰ依次连接的连杆ⅰ和连杆ⅱ,与此连杆ⅱ相铰接的曲柄滑块机构,设置在此曲柄滑块机构上的舵机ⅲ,通过法兰盘ⅱ与此舵机ⅲ相连接的套筒,设置在此套筒顶部的夯锤,设置在所述套筒底部两侧且通过销轴与所述套筒相连接的两个挡板,
8.所述的树苗分选旋转装置包括设置在所述两组支撑底盘装置上的载物板,设置在此载物板上的舵机ⅱ,通过法兰盘ⅰ与此舵机ⅱ相连接的拨单片,设置在此拨单片上的一组存苗筒,所述的载物板上设有与所述套筒位置对应的通孔,
9.所述的浇水储水装置包括设置在所述两组支撑底盘装置上的水泵,与此水泵相连接的喷头,与所述的水泵相连接的储水罐。
10.所述的曲柄滑块机构包括与所述连杆ⅱ相铰接的机械臂,设置在此机械臂上的滑块,与此滑块滑动连接的竖直导轨,所述的舵机ⅲ和法兰盘ⅱ均设置所述的机械臂上。
11.所述的太阳能供储能装置包括太阳能板和蓄电池。
12.所述的一组存苗筒的数量为3个
‑
5个。
13.本实用新型的优点:
14.本实用新型的全自动植树机器人,将传统土法治沙的方法与现代机器人技术结合在一起,用机器人取代人力,实现沙漠中自动化种植,大幅提高效率的同时保证了更高的精确度、稳定性、安全性,环境适应性。
附图说明
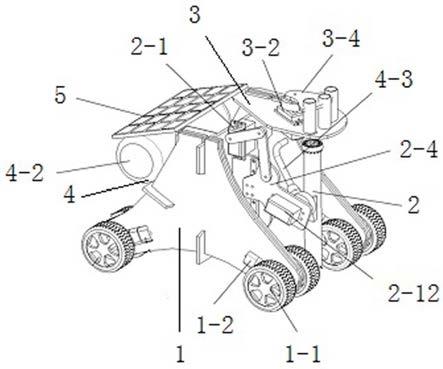
15.图1为本实用新型的结构示意图。
16.图2为本实用新型的正面示意图。
17.图3为本实用新型的俯视示意图。
18.图4为本实用新型的树苗分选旋转装置结构示意图。
19.图5为本实用新型的一体化多功能套筒的结构示意图。
20.图6为本实用新型的套筒的结构示意图。
具体实施方式
21.下面结合附图进一步说明本实用新型的具体实施方式。
22.如图1
‑
6所示,本实用新型的全自动植树机器人,其特征在于包括两组支撑底盘装置1,设置在此两组支撑底盘装置1上且位于后端的一体化多功能套筒2,设置在此一体化多功能套筒2上方的树苗分选旋转装置3,设置在所述两组支撑底盘装置1上且位于前端的浇水储水装置4和太阳能供储能装置5,
23.每组支撑底盘装置1包括三角支撑板,分别设置在此三角支撑板两个角的两组车轮组1
‑
1,分别与每组车轮组1
‑
1相连接的电机1
‑
2,
24.所述的一体化多功能套筒2包括舵机ⅰ2
‑
1,与此舵机ⅰ2
‑
1依次连接的连杆ⅰ2
‑
2和连杆ⅱ2
‑
3,与此连杆ⅱ2
‑
3相铰接的曲柄滑块机构,设置在此曲柄滑块机构上的舵机ⅲ2
‑
12,通过法兰盘ⅱ2
‑
7与此舵机ⅲ2
‑
12相连接的套筒2
‑
8,设置在此套筒2
‑
8顶部的夯锤2
‑
9,设置在所述套筒2
‑
8底部两侧且通过销轴2
‑
11与所述套筒2
‑
8相连接的两个挡板2
‑
10,
25.所述的树苗分选旋转装置3包括设置在所述两组支撑底盘装置1上的载物板3
‑
1,设置在此载物板3
‑
1上的舵机ⅱ3
‑
2,通过法兰盘ⅰ3
‑
3与此舵机ⅱ3
‑
2相连接的拨单片3
‑
4,设置在此拨单片3
‑
4上的一组存苗筒3
‑
5,所述的载物板3
‑
1上设有与所述套筒2
‑
8位置对应的通孔3
‑
6,
26.所述的浇水储水装置4包括设置在所述两组支撑底盘装置1上的水泵4
‑
1,与此水泵4
‑
1相连接的喷头4
‑
3,与所述的水泵4
‑
1相连接的储水罐4
‑
2。
27.所述的曲柄滑块机构包括与所述连杆ⅱ2
‑
3相铰接的机械臂2
‑
4,设置在此机械臂2
‑
4上的滑块2
‑
5,与此滑块2
‑
5滑动连接的竖直导轨2
‑
6,所述的舵机ⅲ2
‑
12和法兰盘ⅱ2
‑
7均设置所述的机械臂2
‑
4上。
28.所述的太阳能供储能装置5包括太阳能板和蓄电池。
29.所述的一组存苗筒3
‑
5的数量为3个
‑
5个。
30.本实用新型的全自动植树机器人,两组支撑底盘装置1,每组支撑底盘装置1的每组车轮组1
‑
1都采用独立电机1
‑
2驱动,每组车轮组1
‑
1在保证动力输出的稳定的同时还可以通过电机1
‑
2的差速实现转向,为了更好的进行沙地作业,可改装底盘在复杂沙漠环境中还可以使用链式履带。
31.一体化多功能套筒2的顶部有夯锤2
‑
9,底部通过两个销轴2
‑
11连接两个挡板2
‑
10,使套筒2
‑
8底部呈锥形,套筒2
‑
8底部呈锥形接触面积小,压强大,以便套筒2
‑
8深入沙土中;套筒2
‑
8中的挡板2
‑
10在套筒2
‑
8上提的过程中会受到自身重力与土的重力从而自锁,使土留在套筒2
‑
8中以便旋转将土带出;套筒2
‑
8顶部夯锤2
‑
9接触面积大,可以更好的进行压土。
32.树苗分选旋转装置3,在每个存苗筒3
‑
5内各放置一棵树根向下的树苗,当套筒2
‑
8完成挖坑工作后,舵机ⅱ3
‑
2会驱动树苗分选旋转装置3旋转一个角度,使存苗筒3
‑
5与载物板3
‑
1的通孔3
‑
6对正,随后树苗会在自身重力的作用下,依次通过载物板3
‑
1的通孔3
‑
6和套筒2
‑
8垂直落入事先挖好的坑中。舵机ⅰ2
‑
1驱动连杆ⅰ2
‑
2和连杆ⅱ2
‑
3,再由曲柄滑块机构带动套筒2
‑
8上下运动,运动过程中套筒2
‑
8始终是竖直的,保证了垂直挖坑、种树、压土。
33.浇水储水装置4在完成一次种植后,水泵4
‑
1会运行,喷头4
‑
3进行浇水。
34.太阳能供储能装置5包括太阳能板和蓄电池,机器人作业时使用蓄电池进行供能,太阳能板辅助供能。当机器人停止作业时太阳能板可以为蓄电池充电,保证机器人的工作时长。
35.如图1~3所示的一种全自动植树机器人,由可改装的支撑底盘装置1(轮胎或履带)、一体化多功能套筒2、树苗分选旋转装置3、浇水储水装置4、太阳能供储能装置5组成,可以自动完成挖坑、分苗、种植、压土、浇水功能。
36.机器人作业前,在各个存苗筒3
‑
5存入待种植树苗,随后各个电机1
‑
2分别驱动四组车轮组1
‑
1前进到达指定种树位置。舵机ⅰ2
‑
1通过曲柄滑块机构带动机械臂2
‑
4向下运动,使一体化多功能套筒2插入土中,随后舵机ⅰ2
‑
1通过曲柄滑块机构带动机械臂2
‑
4向上运动,此时套筒2
‑
8中的两个挡板2
‑
10实现自锁,将土留在套筒2
‑
8中,完成挖树坑工作;舵机ⅲ2
‑
12通过法兰盘ⅱ2
‑
7带动套筒 2
‑
8旋转180
°
同时将沙土甩出,此时套筒2
‑
8下端为夯锤2
‑
9,舵机ⅱ3
‑
2通过法兰盘ⅰ3
‑
3带动拨单片3
‑
4旋转一个角度,使存苗筒3
‑
5与载物板 3
‑
1的通孔3
‑
6对正,随后树苗会在自身重力的作用下,依次通过载物板 3
‑
1的通孔3
‑
6、套筒 2
‑
8垂直落入事先挖好的坑中。舵机ⅰ2
‑
1通过曲柄滑块机构带动机械臂 2
‑
4反复快速上下运动,用套筒2
‑
8的夯锤 2
‑
9将土夯实,压土完成后套筒2
‑
8停留在最高处。水泵4
‑
1将储水罐 4
‑
2中的水抽出,并通过喷头 4
‑
3进行浇水,整车机构复位,循环如上动作已实现全自动连续种植。
37.如图4,树苗分选旋转装置3,舵机ⅱ3
‑
2旋转一个角度,通过法兰盘ⅰ3
‑
3带动拨单片3
‑
4旋转,舵机ⅱ3
‑
2每旋转一个角度,会使存苗筒3
‑
5正好位于载物板3
‑
1的通孔3
‑
6上方,树苗会在自重的作用下落入套筒2
‑
8内。
38.如图5,一体化多功能套筒 2的上下动作由舵机ⅰ2
‑
1带动曲柄滑块机构完成,具体为舵机ⅰ2
‑
1旋转一个角度,连杆ⅰ2
‑
2与连杆ⅱ2
‑
3运动带动机械臂 2
‑
4运动,机械臂2
‑
4一端与滑块 2
‑
5相连,另一端与套筒 2
‑
8相连,因滑块 2
‑
5只能在竖直导轨 2
‑
6上滑动,由此保证了挖洞、种植、压土作业中套筒始终是竖直的;套筒2
‑
8的旋转动作由舵机ⅲ2
‑
12旋转180
°
通过法兰盘ⅱ2
‑
7带动,可以完成将土倾倒、套筒2
‑
8挖洞端与压土端的切换的任务。
39.如图6,套筒2
‑
8一端为夯锤 2
‑
9,另一端由两个挡板2
‑
10和销轴2
‑
11组成的自锁机构。挖坑时,自锁机构端为下端,该端套筒2
‑
8壁呈锥形,可以增大压强,以便套筒2
‑
8插入土中,在套筒2
‑
8上升过程中两个挡板2
‑
10会在沙土与自身重力的作用下自锁,将沙土随套
筒2
‑
8带出;套筒2
‑
8旋转180
°
后,两个挡板2
‑
10会在自身重力的作用下打开自锁,树苗可以通过套筒2
‑
8到树坑,压土时,夯锤2
‑
9为下端,该端套筒2
‑
8壁厚,接触面积大,易将土夯实。
40.本实用新型的全自动植树机器人,将传统土法治沙的方法与现代机器人技术结合在一起,用机器人取代人力,实现沙漠中自动化种植,大幅提高效率的同时保证了更高的精确度、稳定性、安全性,环境适应性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1