一种用于收割机卸粮炮筒的卸粮控制系统的制作方法
1.本实用新型涉及一种用于收割机卸粮炮筒的卸粮控制系统,属于农业设备控制领域。
背景技术:
2.收割机它是一体化收割农作物的机械。一次性完成收割、脱粒,并将谷粒集中到储藏仓,然后在通过传送带将粮食输送到运输车上,也可用人工收割,将稻、麦等作物的禾秆铺放在田间,然后再用谷物收获机械进行捡拾脱粒。收割机上的卸粮炮筒在卸粮时需要先提升到一定角度,才能旋转到工作位,如果错误操作会总成卸粮炮筒的损坏,其次当卸粮完成时,每次需手动长时间操作,用户操作时间较长,操作极为不便。
技术实现要素:
3.本实用新型针对上述问题提供了一种用于收割机卸粮炮筒的卸粮控制系统。
4.本实用新型采用如下技术方案:
5.本实用新型所述的一种用于收割机卸粮炮筒的卸粮控制系统,该卸粮炮筒为竖直段及延伸段;延伸段通过升降阀实现上升或下降;竖直段向左旋转或向右旋转;还包括旋转电机,控制单元,旋转电机布置在收割机上,旋转电机通过齿轮组与卸粮炮筒的竖直段相连,旋转电机驱动卸粮炮筒的竖直段向左旋转或向右旋转;控制单元用于控制旋转电机及升降阀。
6.本实用新型所述的用于收割机卸粮炮筒的卸粮控制系统,所述的旋转电机通过机座布置收割机上,机座与收割机相固定,机座位于卸粮炮筒的竖直段一侧;所述的卸粮炮筒的竖直段的外周面设有齿条,旋转电机的驱动端设有齿盘,所述齿盘与卸粮炮筒竖直段的齿条相互啮合。
7.本实用新型所述的用于收割机卸粮炮筒的卸粮控制系统,位于收割机人员操作部设有连接控制单元的操作面板。
8.本实用新型所述的用于收割机卸粮炮筒的卸粮控制系统,控制单元包括中央控制器主机、编码器,角度传感器;所述的编码器位于旋转电机上,中央控制器主机的信号输入端与编码器相连;角度传感器位于卸粮炮筒延伸段上,中央控制器主机的信号输入端与角度传感器相连。
9.有益效果
10.本实用新型提供的用于收割机卸粮炮筒的卸粮控制系统,为卸粮炮筒提供了一套可控的系统,可自行对卸粮炮筒进行提升或旋转操作,其结构控制简单,操作面板总线通讯能清晰反应出目前工作状态,针对出现的问题能清楚显示,为用户使用以及维修提供帮助,减轻用户操作负荷和操作时间,提高工作效率。
11.本实用新型提供的用于收割机卸粮炮筒的卸粮控制系统,保留了手动操作的部件;针对自动控制系统在失效的情况时,将失去一键回位和一键转出功能,但手动操作正常
使用。
附图说明
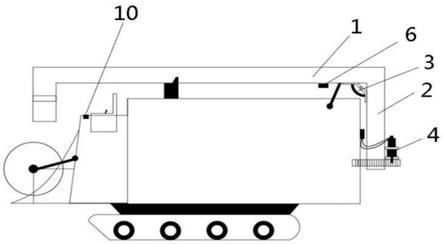
12.图1是本实用新型的收割机车体结构示意图;
13.图2是本实用新型的卸粮控制系统俯视结构示意图;
14.图3是本实用新型的卸粮炮筒旋转示意图;
15.图4是本实用新型的旋转电机及编码器示意图;
16.图5是本实用新型的操作面板示意图。
具体实施方式
17.为使本实用新型实施例的目的和技术方案更加清楚,下面将结合本实用新型实施例的附图,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.如图1所示:用于收割机卸粮炮筒的卸粮控制系统,该卸粮炮筒为竖直段1及延伸段2;延伸段2通过升降阀3实现上升或下降;旋转电机4,控制单元包括中央控制器主机、编码器5,角度传感器6。
19.如图2、图3所示:该卸粮控制系统中旋转电机4通过机座7布置收割机上,机座7与收割机相固定,机座7位于卸粮炮筒的竖直段一侧;卸粮炮筒的竖直段的外周面设有齿条8,旋转电机4的驱动端设有齿盘9,齿盘9与卸粮炮筒竖直段的齿条8相互啮合;旋转电机4驱动卸粮炮筒的竖直段向左旋转或向右旋转;
20.位于收割机人员操作部设有连接控制单元的操作面板10;操作面板10内设有中央控制器主机,中央控制器主机的信号输入端与编码器4及角度感应器6相连通;角度传感器6用于将卸粮炮筒延伸段2的抬升角度信息反馈至中央控制器主机;中央控制器主机将信号传递至编码器4,编码器4解码编译后控制旋转电机4旋转;
21.如图3、图4所示:不管机器卸粮时卸粮筒处于任何位置,当卸粮完成后,只需按下一键回位卸粮筒将自动上升,当上升至传感器感应区域内(安全高度)开始根据编码器转出的角度反向旋转并将卸粮筒下降于安全支架内,当支架传感器感应到炮筒时将模块停止工作。具体由控制模块和电机两部分,电机带有编码器时刻记录卸粮筒旋转角度误差小于千分之一度,卸粮筒可以非常准确的一键回位,及时整车断电模块具有断电记忆功能,上电后依旧可以保证卸粮筒一键准确回位。解决用户因卸完粮需长时间手动不断操作将卸粮筒提升,手动操作转回位置难以对准降入支架的麻烦。
22.另还具备一键转出功能,根据卸粮习性一键转出分2个角度,第一次自动提升向右转出100度,第二次继续向右转到190度,中途如到达用户理想卸粮位置可随意触及任意按钮并将停止转动。减轻用户需一直手动操作的负担。
23.如图5所示:操作面板10中的功能控制如下:
24.上升按键:按下该按键,粮筒上升。
25.下降按键:按下该按键,粮筒下降。
26.左旋按键:按下该按键,粮筒向左旋转。
27.右旋按键:按下该按键,粮筒向右旋转。
28.一键转出(右方):点按该按键,粮筒自行运转到右方。
29.一键转出(后方):点按该按键,粮筒自行运转到后方。
30.一键回位:点按该按键,粮筒自行回到粮筒支架上。
31.电机状态指示灯:绿灯常亮:电机正常待机;绿灯闪烁:电机正常运行中;红灯闪烁:电机异常。
32.控制器指示灯:绿灯常亮:控制器正常待机;黄灯常亮:控制器未校准;红灯闪烁:通讯异常;红灯常亮:电源异常。
33.传感器指示灯:为角度触感器其绿灯常亮:角度传感器正常。
34.红灯常亮:角度传感器故障。
35.本实用新型的操作方法如下:
36.1、开机:操控面板上电自动开机,6个按键背光灯绿灯常亮.8个信号灯红灯和绿灯各亮0.5秒钟用于灯光自检,之后进入正常显示和操控状态。默认粮筒在上次中央控制器断电前的位置。
37.2、控制拔禾轮上升和下降:按下拔禾轮升降手柄上的上升键(或下降)键,控制器输出电磁阀控制信号,控制液压系统使拔禾轮上升(或下降),松开按键,拔禾轮停止上升(或下降)。
38.3、控制粮筒上升和下降:按下上升键(或下降)键,控制器输出电磁阀控制信号,控制液压系统使粮筒上升(或下降),松开按键,粮筒停止上升(或下降)。
39.4、控制粮筒左旋和右旋:按下左旋(或右旋)键,控制器驱动电机左转(或右转),控制粮筒向左(或向右)旋转。松开按键,粮筒停止旋转。
40.手动控制粮筒旋转时,当粮筒转到零位或正右方位置时自动停下,松开按键再次按下才继续旋转。粮筒左旋到正左方(或右旋到正后方)位置时自动停下,不能继续旋转。
41.5、自动控制粮筒转出和回位:粮筒不在正右方位置时,点按一键转出按键,一键转出指示灯闪亮,控制器自动控制粮筒上升到高限位位置,然后右旋(或左旋)到正右方位置停下,一键转出指示灯常亮。
42.粮筒在正右方位置时,按一下一键转出按键,一键转出指示灯闪亮,控制器自动控制粮筒上升到高限位位置,然后右旋到正后方位置停下,一键转出指示灯常亮。
43.粮筒在任意位置,按一下一键回位按键,一键回位指示灯闪亮,控制器自动控制粮筒上升到高限位位置,然后左旋(或右旋)到y型支架正上方位置,最后下降到y型支架上,一键回位指示灯常亮。如果中途要取消自动功能,则再按一次6个按键中的任意一个按键,粮筒停止在当前位置。
44.7、控制器软件复位:长按一键回位按键5秒钟,零位指示灯绿灯常亮后,松开一键回位按键,控制器软件复位,默认粮筒在y型支架上。更换(或新装)中央控制器后,必须先手动控制粮筒回到y型支架上,再进行1次控制器软件复位。
45.8、关机:先手动或自动控制粮筒回到y型支架上,再断开控制器电源。
46.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到
的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1