具有避障仿形功能的落地林果集果装置
1.本实用新型林果自动采集机械技术领域,特别涉及一种具有避障仿形功能的落地林果集果装置。
背景技术:
2.近年来,我国林果种植面积迅猛增加,林果产业的迅速发展促进了果园机械的市场需求。林果收获作为果园生产全过程中重要的环节之一,对促进林果产业发展、增加效益起着重要作用。目前,林果收获方式主要有两种:树上果品一次性联合收获和树上果品摇落—集果捡拾的分段收获。由于我国果园种植密度大,果园地表情况复杂多样,大型林果收获机和接果装置无法在果园灵活作业,所以分段收获比较适合我国果园的收获作业。分段收获作业是采用集果机械将摇落在地面的果实聚集在果树行间或作业机械侧面,再通过捡拾机械进行捡拾作业。所以集果和捡拾作业质量,直接影响果实的品质。
3.早在二十世纪五六十年代,国外研究学者就对林果收获机械进行了相关研究,目前已经有比较成熟的机型,比如澳大利亚医学管理人员协会会员公司设计制造的 semek自走式榛子收获机,通过前端的两个大圆盘集果器进行集果,然后通过滚筒毛刷进行捡拾,再通过输送机构将榛子送至栅格板进行清杂,而后实现收集。w.jackcroft wichita发明了一种自走式山核桃收获机,采用钢板将地面上的山核桃梳刷成统一厚度,再采用错位对置的捡拾辊进行捡拾,被拾起的山核桃在惯性作用下落入振动筛进行清杂和输送,最终通过输送带和输送辊进入集果箱。总体而言,国外大多是采用了圆盘毛刷或者铲刷相结合的方式来进行果实的捡拾,整体设备外形较大,转弯半径大,机器作业不灵活,不适合我国的果园条件和林果收获方式。
4.近年来,我国也开展了林果收获机械的研究,但大多还处于试验室阶段,离推广应用还存在一定差距。其中,较为典型的研究成果有,石河子大学机械工程学院研制的4zz-2y型红枣收获机,采用安装在旋转轴上的树脂片对落地红枣进行集条,然后利用入土的弯形钢齿进行捡拾。该设备由于树脂片安装缺少自由度,弯形钢齿不具备仿形功能,作业效果欠佳。武汉威明德公司冯冰等人发明了一种林果收获机,通过圆盘毛刷将落在地面的果实收集成一行,采用抖动式拾果器利用振动和惯性原理将收集成行的果实拾起,落入抖动式拾果器后方;通过弹齿搂果器的旋转将果实带到输送带上,完成果实的收获作业。该设备在使用过程中会扫入很多树叶树枝等杂物,从而易导致输送堵塞或卡绊,而且也为后续的分拣处理带来较大的麻烦。石河子大学还研制了一种气吸式红枣收获机,在实际使用中发现该设备同样存在容易将杂物吸入堵塞管道的情况,工作时还会因有气流致使地面尘土扬起导致作业环境恶劣,而且捡拾作业过程中需要人工扶持,捡拾效率不高。此外,还有一种铲拨式捡拾装置,可以通过拨动前方果实使落果进入铲板中来完成捡拾动作。该装置对地面平整度要求较高,实际使用时漏捡率高,捡拾收获效率较低,除此之外该装置易将树枝等杂物拨入,从而造成装置卡绊甚至损坏。
5.针对上述现有林果收获机械存在的问题以及我国果园特点和我国林果产业对收
获机械的实际需求,我校自主研发、设计了一种适用性强、集集果、捡拾、输送、存放于一体的落地林果集果捡拾机器人,具有避障仿形功能的落地林果集果装置是该机器人的重要组成部分。
技术实现要素:
6.本实用新型的目的在于克服现有技术的不足,提供一种可自动规避障碍、林果捡拾效果好、漏检率低的具有避障仿形功能的落地林果集果装置。
7.本实用新型解决其技术问题是通过以下技术方案实现的:
8.一种具有避障仿形功能的落地林果集果装置,其特征在于:由避障机构、信号采集机构、仿形机构、集果机构组成,避障机构设置于林果采集车上,信号采集机构设置于避障机构前端,仿形机构设置于避障机构上侧面,集果机构设置于仿形机构上。
9.而且,所述避障机构,由避障杆、摇杆、连接件、滑轨、滑块、滑块座、连杆、长曲柄、短曲柄、避障电机组成,避障电机固装于林果采集车上并与长曲柄内端传动连接,长曲柄外端与摇杆内端铰装连接,滑轨、短曲柄内端均铰装于林果采集车上,外端分别与避障杆、连杆相铰装连接,连杆另一端铰装于滑轨中部,连接件一端铰装于避障杆中部,另一端铰装于摇杆外端部与滑块底座之间,滑块底面与滑块座相固装,顶面滑动设置于滑轨内。
10.而且,所述连接件,其上制有铰轴。
11.而且,所述滑块座,其上制有连接螺孔、铰轴孔。
12.而且,所述滑块,其上制有连接螺孔。
13.而且,所述滑轨,其内制有滑槽,其上端部制有连接铰轴,其上侧面制有连接耳。
14.而且,所述信号采集机构,由支撑杆、触杆、连接板、空气弹簧、传感器组成,支撑杆固装于避障杆上,触杆铰装于支撑杆上端部,连接板固装于摇杆上支撑杆内侧,空气弹簧在内、传感器在外并排连接于触杆与连接板之间。
15.而且,所述仿形机构,由后立柱、前立柱、仿形架组成,后立柱固装于避障杆末端,仿形架后侧转动设置于后立柱上,前侧转动设置于前立柱上。
16.而且,所述仿形架,包括仿形上架、仿形下架,仿形上架在上、仿形下架在下相对平行设置于后立柱、前立柱上,均由套筒、仿形横杆、仿形纵杆、仿形连接件组成,套筒平行设置于后立柱、前立柱端部,仿形横杆平行转动设置于套筒内,仿形纵杆平行对称设置于仿形横杆左右两端,仿形连接件连接于仿形横杆、仿形纵杆之间。
17.而且,所述集果机构,由伸缩杆、支撑杆、电机支架、集果电机、圆盘毛刷、万向轮组成,伸缩杆上端铰装于前立柱上,支撑杆上端固装于前立柱上,伸缩杆、支撑杆下端共同设置电机支架,集果电机固装于电机支架上并与圆盘毛刷传动连接,万向轮设置于圆盘毛刷底部。
18.本实用新型的优点和有益效果为:
19.1.本实用新型设置有仿形机构,可适用于起伏地面上的林果捡拾。
20.2.本实用新型设置有信号采集机构和避障机构,捡拾林果过程中可自动避开树干,使果树株距之间的落地林果得到捡拾,避免遗漏,大大提高林果捡拾效果。
21.3.本实用新型结构设计科学合理,可适用于起伏地面上的林果捡拾,可自动避开树干,具有适应性强、捡拾率高、漏检率低等优点,是一种具有较高创新性的具有避障仿形
功能的落地林果集果装置。
附图说明
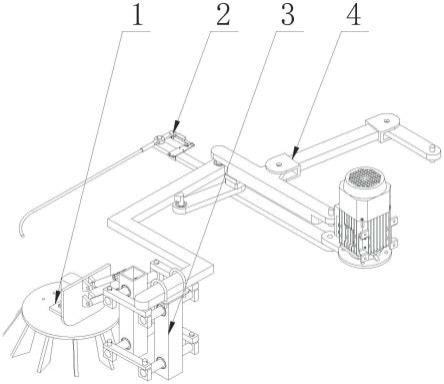
22.图1为本实用新型的结构示意图(立体图);
23.图2为避障机构和信号采集机构结构示意图(立体图);
24.图3为仿形机构结构示意图(立体图);
25.图4为集果机构结构示意图(立体图);
26.图5为连接件结构示意图(立体图);
27.图6为滑块底座结构示意图;
28.图7为滑块结构示意图;
29.图8为滑轨结构示意图;
30.图9为图8的a-a向视图。
31.附图标注说明:
32.1-集果机构,2-信号采集机构,3-仿形机构,4-避障机构,5-触杆,6-避障杆, 7-连接板,8-空气弹簧,9-传感器,10-支撑杆,11-连接件,12-滑轨,13-滑块,14
‑ꢀ
滑块座,15-连杆,16-摇杆,17-长曲柄,18-短曲柄,19-避障电机,20-前立柱,21u 型螺栓,22-仿形横杆,23-后立柱,24-套筒,25-仿形连接件,26-仿形纵杆,27
‑ꢀ
伸缩杆,28-支撑杆,29-圆盘毛刷,30-电机支架,31-集果电机,32-万向轮,33
‑ꢀ
铰轴,34-连接螺孔,35-铰轴孔,36-连接螺孔,37-连接耳,38-连接铰轴,39-滑槽。
具体实施方式
33.下面通过具体实施例对本实用新型作进一步详述,以下实施例只是描述性的,不是限定性的,不能以此限定本实用新型的保护范围。
34.一种具有避障仿形功能的落地林果集果装置,由控制中心、避障机构4、信号采集机构2、仿形机构3、集果机构1组成,控制中心设置于林果采集车上,避障机构设置于林果采集车上,信号采集机构设置于避障机构前端,仿形机构设置于避障机构上侧面,集果机构设置于仿形机构上。
35.避障机构,由避障杆6、摇杆16、连接件11、滑轨12、滑块13、滑块座14、连杆15、长曲柄17、短曲柄18、避障电机19组成,避障电机固装于林果采集车上并与长曲柄内端传动连接,长曲柄外端与摇杆内端铰装连接(这里的内、外是相对于林果采集车而言),滑轨、短曲柄内端均铰装于林果采集车上,外端分别与避障杆、连杆相铰装连接,连杆另一端铰装于滑轨中部,连接件一端铰装于避障杆中部,另一端铰装于摇杆外端部与滑块底座之间,滑块底面与滑块座相固装,顶面滑动设置于滑轨内。避障电机为步进电机,输出轴与长曲柄内端相固装。
36.连接件,其上制有铰轴33。
37.滑块座,其上制有连接螺孔34、铰轴孔35。
38.滑块,其上制有连接螺孔36。
39.滑轨,其内制有滑槽39,其上端部制有连接铰轴38,其上侧面制有连接耳37。
40.信号采集机构,由支撑杆10、触杆5、连接板7、空气弹簧8、传感器9组成,支撑杆固
装于避障杆上,触杆铰装于支撑杆上端部,连接板固装于摇杆上支撑杆内侧,空气弹簧在内、传感器在外并排连接于触杆与连接板之间。
41.仿形机构,由后立柱23、前立柱20、仿形架组成,后立柱经u型螺栓21固装于避障杆末端,仿形架后侧转动设置于后立柱上,前侧转动设置于前立柱上。
42.仿形架,包括仿形上架、仿形下架,仿形上架在上、仿形下架在下相对平行设置于后立柱、前立柱上,均由套筒24、仿形横杆22、仿形纵杆26、仿形连接件25组成,套筒平行设置于后立柱、前立柱端部,仿形横杆平行转动设置于套筒内,仿形纵杆平行对称设置于仿形横杆左右两端,仿形连接件连接于仿形横杆、仿形纵杆之间。
43.集果机构,由伸缩杆27、支撑杆28、电机支架30、集果电机31、圆盘毛刷29、万向轮32组成,伸缩杆上端铰装于前立柱上,支撑杆上端固装于前立柱上,伸缩杆、支撑杆下端共同设置电机支架,集果电机固装于电机支架上并与圆盘毛刷传动连接,万向轮设置于圆盘毛刷底部。
44.本实用新型的工作原理:
45.利用本实用新型一种具有避障仿形功能的落地林果集果装置收集果实时,需要将避障机构中的短曲柄、滑轨和避障电机安装在林果采集车上,调节伸缩杆使得圆盘毛刷调整至合适的位置。然后,启动采集机构的电机,启动林果采集车,使集果机构处于果树株距之间,林果采集车在落有林果的行距之间行走,在避障杆的带动下,集果机构同步向前,在圆盘毛刷的转动作用下,将落在地面的果实击打至林果采集车车架下专设的容器内。当遇到地面高低起伏变化时,万向轮会随着地面的高低起伏变化发生竖直方向上位置的相应改变,此时前立柱在伸缩杆、支撑杆作用下跟随上下升降,仿形横杆在套筒内发生相对转动,可始终保持圆盘毛刷与地面接触的设定状态,提高了集果装置的稳定性和集果率。当第一个株距间果实集果完成时,触杆接触前方果树树干,树干的反作用力使触杆绕避障杆前端转动,触杆末端的位移传感器长度发生变化,气弹簧被拉伸,当转动至一定角度,即位移传感器长度发生一定变化时,传感器将信号传输至控制中心,控制中心控制启动避障电机,避障电机带动长曲柄向右偏转,长曲柄转动,带动摇杆、滑轨、连接件和避障杆转动,此时,长曲柄带动摇杆向右移动的同时向后缩回,向后缩回时带动铰装其上的连接件以及设置于连接件上的滑块座、滑块向后移动,连接件向后移动带动避障杆发生向后偏转,这样即可使集果机构绕过前方树干;当绕过前方树干后,此时触杆没有果树树干的反作用力,气弹簧恢复原状,并拉动触杆进行反向转动恢复原状,此时传感器将信号传输至控制中心,控制中心控制避障电机反向旋转,使得滑轨和避障杆恢复原状,进入下一个株距,继续进行集果作业。
46.尽管为说明目的公开了本实用新型的实施例和附图,但是本领域的技术人员可以理解:在不脱离本实用新型及所附权利要求的精神和范围内,各种替换、变化和修改都是可能的,因此,本实用新型的范围不局限于实施例和附图所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1