一种果实采摘收集装置
1.本实用新型涉及农业收割设备的技术领域,更具体涉及一种果实采摘收集装置。
背景技术:
2.目前,对于果实的采摘,我们还是采用传统的人工采摘方式,比如葡萄、桃子、柿子这种水果由于数量不是特别多而且容易碰伤,不宜纯机械化采摘作业,但是有些树上熟且数量多的果实,如果还采用人工采摘就非常浪费人力,比如红枣、枸杞等。
3.目前,我国现有的适用于采摘红枣的机械的制作成本较高,一般农户很少采用现有的红枣采摘机,在红枣成熟期时仍需要大量的人力去手工摘取红枣。且枣树刺较多,枣树人工采摘容易刺到手,因而面对需要大规模的红枣采摘的农场,单纯靠人工,工作效率十分低下,且在采摘过程中红枣的破损和采摘人员受伤概率也很高。采摘后,还需要采摘人员将各自采摘的果实集中在一起,非常费力。另外,红枣成熟采摘期不长,红枣种植地区的新疆等地气候多变,给人工采摘带来了更多的困难和挑战。近年来市场的需求也在逐渐增加,人工采摘的方式已不能够实现及时供给。
4.因此,需要设计出一种设备,能够代替人力对红枣进行摘取工作,减轻繁重的人力劳动,实现机械化采摘和收集。
技术实现要素:
5.为了解决上述问题,本实用新型提供了一种果实采摘收集装置,可实现自动化采摘和收集,取代人工作业,工作效率高。
6.根据本实用新型的一个方面,提供了一种果实采摘收集装置,其包括可移动的车辆、安装于车辆上的采摘机构和收集机构;采摘机构包括基架、机械臂和可张开或闭合的机械手爪,基架固定于车辆,机械臂的一端铰接于基架,机械手爪连接于机械臂的另一端,机械手爪上安装有激振器;收集机构包括基座、齿轮齿条传动组件、卷轴传动组件和减震布,基座固定于车辆,齿轮齿条传动组件安装于基座,卷轴传动组件包括卷轴和电机,车辆的侧壁上部安装有支撑板,卷轴的两端通过轴承座安装于支撑板,电机的输出轴连接卷轴,减震布卷绕于卷轴上、且减震布的前端与卷轴固定,减震布的末端与齿轮齿条传动组件的齿条顶端连接,齿条呈上翘的弧形,齿条朝向卷轴所在侧伸出时、带动减震布展开;支撑板的下方设有传送带,传送带的一侧安装于车辆的侧壁,以输送减震布上收集到的果实。由此,需要采摘果实时,车辆移动至果树的一侧,机械臂控制机械手爪夹紧树干,齿条逐渐伸出,减震布同步展开,由于齿条呈上翘的弧形、完全展开的减震布也呈弧形,待减震布完全展开后,激振器产生激振力,带动机械手爪与果树振动,使果实掉落于减震布上,在采摘的过程中,传送带启动,果实落到弧形的减震布上后会落入至传送带上,传送带将果实输送到下一工序,比如收集果实或者进入后续的分拣工序;该装置采用振动的方式实现了果实的自动化采摘,机械手爪不挤压果实,可避免果实压伤,利用弧形的减震布接住掉落的果实并使果实滑落到传送带上,可有效减少果实掉落时的损伤,采摘后的果实通过传送带持续输送至
后续工序,大大提高了工作效率,减少了人工。
7.在一些实施方式中,机械臂包括机械大臂、机械小臂和第一液压缸,机械大臂的一端套设于机械小臂,第一液压缸的缸体、活塞杆分别连接于机械小臂、机械大臂,机械手爪安装于机械大臂的前端,机械小臂与基架铰接。由此,通过第一液压缸来调整机械小臂和机械大臂的相对位置,实现机械大臂的伸出和回缩,调整机械手爪的位置,将机械手爪准确送至待采摘的树干旁。
8.在一些实施方式中,基架与机械小臂之间设有第二液压缸,第二液压缸的缸体与基架的侧壁铰接,第二液压缸的活塞杆与机械小臂的侧壁铰接,第二液压缸的活塞杆伸缩以驱动机械小臂相对于基架转动。由此,通过第二液压缸的伸缩使机械小臂相对于基架转动,实现机械小臂前端的机械大臂的位置的抬高或降低,以便机械手爪可夹取不同高度的树干,提高该装置的适用性。
9.在一些实施方式中,激振器包括液压柱塞马达、偏心轴、弹簧和震动箱体,弹簧通过弹簧固定件安装于震动箱体内,偏心轴贯穿弹簧固定件、且偏心轴的两端通过轴承安装于震动箱体,偏心轴设有偏心块,液压柱塞马达通过齿轮箱轴连接于偏心轴。由此,液压柱塞马达启动,偏心块转动,利用离心运动产生激振力,带动机械手爪与树干振动,使果实掉落。
10.在一些实施方式中,机械手爪安装有橡胶块。由此,可减小夹紧树干时造成的损伤。
11.在一些实施方式中,齿轮齿条传动组件包括齿轮轴,齿轮轴的两端通过支架可转动架设于基座,弧形的齿条与齿轮轴啮合,支架的前后端均设有齿条压块,齿条压块构成限定齿条运动的轨道,齿轮轴连接有减速电机。由此,减速电机启动,驱动齿轮轴转动,弧形齿条与齿轮轴啮合,实现弧形齿条的前后移动,由于减震布的末端与齿条顶端连接,齿条可以起到支撑减震布的作用,同时使展开后的减震布具有弧形结构,便于接住掉落下来的果实。
12.在一些实施方式中,基座、齿轮齿条传动组件和卷轴传动组件均设有两组,采摘机构设有一组,采摘机构的基架位于两个基座之间,两组卷轴传动组件分别连接有减震布,两块减震布之间有间距,减震布上设有多个横隔板,减震布的两侧设有竖隔板。由此,左右分布的减震布,加大了承接掉落果实的面积,两侧的竖隔板可避免果实从侧边掉落,多个横隔板可延长减震布的使用寿命且可使掉落的果实,缓慢地滑落到传送带上,避免果实过度挤压,且挡住在横隔板处的果实,在最后减震布收卷的过程中,也会被运送到传送带中。
13.在一些实施方式中,减震布采用pvc涂塑布。由此,减震布具有100%的防水性能,且兼具防霉、耐寒、耐老化、防静电等优点。
14.本实用新型的优点是:本实用新型科学合理,该果实采摘收集装置放置于车辆上,以车辆为载体,适用于大型农场作业,减少搬运的麻烦,通过第一液压缸和第二液压缸巧妙控制了机械大臂相对于树干的前后或上下位置,
15.辅助机械手爪精准夹紧树干,利用激振器的偏心块离心运动产生的激振力,实现机械手爪带动树干振动,使果实掉落,无需人工采摘,可收卷的减震布配合可移动的弧形的齿条,巧妙的展开形成了弧形的减震布,有效接住掉落的果实,最大程度的保护掉落的果实,果实沿着减震布的弧线滚落至运动的传送带上,持续地输送至后续工序,该装置实现了果实的自动化采摘和收集,且可有序输送至后续工序,减少了人工,大大提高了工作效率。
附图说明
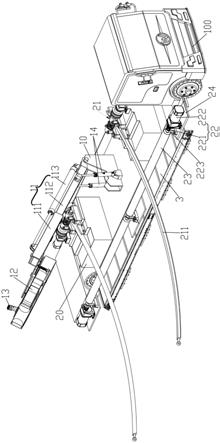
16.图1是本实用新型一种果实采摘收集装置的一实施方式的立体结构示意图;
17.图2是图1的主视图;
18.图3是图1的侧视图;
19.图4是图1的俯视图,图中减震布已展开;
20.图5是收集机构和传送带的俯视结构示意图;
21.图6是收集机构和传送带的立体结构示意图;
22.图7是齿轮齿条传动组件的俯视图;
23.图8是采摘机构的立体结构示意图;
24.图9是图8的俯视图;
25.图10是图8的侧视图;
26.图11是激振器的立体结构示意图;
27.图12是图11的主视图;
28.图13是图12中a-a的剖视图;
29.图14是图13中b-b的剖视图。
具体实施方式
30.下面结合具体实施方式对本实用新型作进一步的说明。
31.如图1所示,本实用新型所述一实施方式的一种果实采摘收集装置,其包括可移动的车辆100、安装于车辆100上的采摘机构和收集机构。
32.如图1和8所示,采摘机构包括基架10、机械臂11和可张开或闭合的机械手爪12。基架10固定于车辆100,机械臂11的一端铰接于基架10,机械手爪12连接于机械臂11的另一端,机械手爪12上安装有激振器13。机械臂11控制机械手爪12夹紧树干,激振器13产生激振力,带动机械手爪12与果树振动,使果实掉落。
33.如图1至4所示,收集机构包括基座20、齿轮齿条传动组件21、卷轴传动组件22和减震布23。基座20固定于车辆100,齿轮齿条传动组件21安装于基座20。卷轴传动组件22包括卷轴221和电机222(如图6所示),车辆100的侧壁上部安装有支撑板24,卷轴221的两端通过轴承座223安装于支撑板24,电机222的输出轴连接卷轴221,减震布23卷绕于卷轴221上、且减震布23的前端与卷轴221固定,减震布23的末端与齿轮齿条传动组件21的齿条211顶端连接。齿条211呈上翘的弧形,齿条211朝向卷轴221所在侧伸出时,带动减震布23展开。支撑板24的下方布置有一条长长的传送带3,传送带3的一侧固定安装于车辆100的侧壁,以输送减震布23上收集到的果实。齿条211逐渐伸出,减震布23同步展开,由于齿条211呈上翘的弧形,完全展开的减震布23也呈弧形,果实掉落于弧形的减震布23上,在采摘的过程中,传送带3启动,果实从弧形减震布23滚落至传送带3上,传送带3将果实输送到下一工序,比如收集果实或者进入后续的分拣工序。
34.如图8至10所示,机械臂11具体包括机械大臂111、机械小臂112和第一液压缸113。机械大臂111的一端套在机械小臂112的外部,第一液压缸113的缸体端部与机械小臂112连接,第一液压缸113的活塞杆与机械大臂111连接。机械手爪12安装于机械大臂111的前端,机械小臂112与基架10铰接。基架10与机械小臂112之间设置有第二液压缸14。第二液压缸
14的缸体与基架10的侧壁铰接,具体的,在基架10的侧壁处安装固定座140,固定座140的底部安装于车辆100,第二液压缸14的缸体可转动铰接于固定座140上。第二液压缸14的活塞杆与机械小臂112的侧壁铰接,第二液压缸14的活塞杆伸缩以驱动机械小臂112相对于基架10转动。通过第一液压缸113来调整机械小臂112和机械大臂111的相对位置,实现机械大臂111的伸出和回缩,调整机械手爪12的位置,将机械手爪12准确送至待采摘的树干旁。通过第二液压缸14的伸缩使机械小臂112相对于基架10转动,实现机械小臂112前端的机械大臂111的位置的抬高或降低,以便机械手爪12可夹取不同高度的树干,提高该装置的适用性。图4中标明了机械臂11的旋转角度,机械臂11的伸缩行程。
35.如图11至14所示,激振器13包括液压柱塞马达131、偏心轴133、弹簧135和震动箱体137。弹簧135通过弹簧固定件136安装于震动箱体137内,偏心轴133贯穿弹簧固定件136、且偏心轴133的两端通过轴承安装于震动箱体137,偏心轴133上安装有上下分布的两个扇形的偏心块134。液压柱塞马达131通过齿轮箱轴132连接于偏心轴133,液压柱塞马达131通过一块安装板130用螺栓固定安装于机械手爪12的其中一个手爪上。机械手爪12安装有橡胶块121。可减小夹紧树干时造成的损伤。液压柱塞马达131启动,偏心块134转动,利用离心运动产生激振力,带动机械手爪12与树干振动,使果实振落,该采摘过程中,机械手爪12不直接与果实接触,可避免果实压伤。
36.如图5至7所示,齿轮齿条传动组件21包括齿轮轴212,齿轮轴212的两端通过支架213可转动架设于基座20。弧形的齿条211与齿轮轴212啮合,支架213的前后端均布置有齿条压块214,共有四个齿条压块214,齿条压块214通过螺栓安装于基座20,四个齿条压块214构成限定齿条211运动的轨道。齿轮轴212的一端连接有减速电机215。当减速电机215启动,驱动齿轮轴212转动,弧形齿条211与齿轮轴212啮合,实现弧形齿条211的前后移动,由于减震布23的末端与齿条211顶端连接,齿条211可以起到支撑减震布23的作用,同时使展开后的减震布23具有弧形结构,便于接住掉落下来的果实。图4中标明了,齿条211的运动轨迹,齿条211伸出时处于张紧状态,减速电机215反转后,齿条211收回。
37.如图1和4所示,本实施例中,基座20、齿轮齿条传动组件21和卷轴传动组件22均设有两组,采摘机构设有一组,采摘机构的基架10位于两个基座20之间。两组卷轴传动组件22分别连接有减震布23,两块减震布23之间有间距,该间距为20mm。减震布23采用双层4mmpvc涂塑布,采用热封拼接,上层涂塑布每隔300mm留40mm的褶皱形成横隔板231,减震布23的两侧的边缘留5mm形成竖隔板232。减震布23采用pvc涂塑布,使减震布23具有100%的防水性能,且兼具防霉、耐寒、耐老化、防静电等优点。左右分布的减震布23,加大了承接掉落果实的面积,两侧的竖隔板232可避免果实从侧边掉落,多个横隔板231可延长减震布23的使用寿命且可使掉落的果实,缓慢地滑落到传送带3上,避免果实过度挤压,且挡住在横隔板231处的果实,在最后减震布23收卷的过程中,也会被运送到传送带3中。
38.需要采摘果实时,车辆100移动至果树的一侧,机械手爪12张开;第二液压缸14驱动机械小臂112向上转动,第一液压缸113驱动机械大臂111相对于机械小臂112向前伸出,通过第一液压缸113和第二液压缸14的配合使机械手爪12准确移动至树干的两侧,机械手爪12闭合、爪夹紧树干;减速电机215驱动齿轮轴212转动,弧形齿条211与齿轮轴212啮合,齿条211逐渐伸出,电机222驱动卷轴221转动,逐渐伸出的齿条211带动减震布23同步展开,由于齿条211呈上翘的弧形、完全展开的减震布23也呈弧形,待减震布23完全展开后,机械
手爪12抓住的树干位于展开的减震布23上方;激振器13启动通过内部偏心块134的离心运动,驱动机械手爪12与果树振动,使果实振落于减震布23上;在采摘的过程中,传送带3启动,果实落到弧形的减震布23上后,大部分果实会沿着弧形的减震布23滚落至传送带3上,传送带3将果实输送到下一工序,当采摘结束后,激振器13停止振动,减速电机215驱动齿条211回缩同时电机222带动减震布23收卷于卷轴221,在减震布23收卷的过程中,滞留在减震布23上的果实会全部落入至传送带3上,被输送到下一工序。
39.本实用新型科学合理,该果实采摘收集装置放置于车辆100上,以车辆100为载体,适用于大型农场作业,减少搬运的麻烦。通过第一液压缸113和第二液压缸14巧妙控制了机械大臂111相对于树干的前后或上下位置,辅助机械手爪12精准夹紧树干,利用激振器13的偏心块134离心运动产生的激振力,实现机械手爪12带动树干振动,使果实掉落,无需人工采摘。可收卷的减震布23配合可移动的弧形的齿条211,巧妙的展开形成了弧形的减震布23,有效接住掉落的果实,最大程度的保护掉落的果实。果实沿着减震布23的弧线滚落至运动的传送带3上,持续地输送至后续工序,该装置实现了果实的自动化采摘和收集,且可有序输送至后续工序,减少了人工,大大提高了工作效率。
40.以上所述的仅是本实用新型的一些实施方式,应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型的创造构思的前提下,还可以做出其它变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1