一种大田智能除草方法与流程
1.本发明涉及一种除草方法,具体是一种针对大田作物的大片田地进行田垄杂草清除的方法,属于农业作业技术领域。
背景技术:
2.农作物种植及生长过程中不可避免地会滋生杂草,杂草跟农作物争夺土壤水分和养分,侵占农田空间,影响农作物生长,不仅会降低农作物的产量和质量,还会间接助长病虫害的滋生和蔓延。特别针对大田作物种植的大片田地,传统的人工除草的方式不仅劳动强度大、而且效率低下。
3.现有技术中针对大田作物的大片田地除草,通常采用化学除草、机械除草等方式。由于化学除草相对省时省力、除草效率高,对于突发性的草害,化学除草见效最快,因此化学除草成为目前在国内外被广泛应用的主要除草方式,但化学除草如果除草剂使用不当,不仅浪费除草剂,而且会造成农产品农药残留量超标,土壤、水环境等农药污染,甚至人员中毒。机械除草借助除草机可有效减少除草工人的劳动强度,减少大量人力资源,提高农业生产效率,但现有的机械除草方式容易出现除草不除根、处理不彻底的问题。
技术实现要素:
4.针对上述问题,本发明提供一种大田智能除草方法,针对田垄间的杂草,能够在实现智能自动化除草的前提下实现智能自动巡检除草,特别适用于针对大田作物的大片田地进行除草作业。
5.为实现上述目的,所使用的大田除草机包括机体、除草装置、振动输送装置、草料收集箱和集中电控装置;
6.所述的机体底部设有行走底盘,行走底盘包括驱动轮和机体转向机构,驱动轮与机体驱动电机传动连接,行走底盘上设有用于侦测行走底盘与地面之间距离的行走底盘距离传感器和包括摄像头的模式识别传感器;
7.所述的除草装置设置在机体内底部,包括沿前后方向滚动设置的除草滚刀,除草滚刀相对于机体左右对称设置为两组,两组除草滚刀通过包括滚刀升降驱动部件的滚刀升降机构和包括滚刀间距调节部件的滚刀间距调节机构安装在机体上,通过控制滚刀升降驱动部件的动作控制两组除草滚刀的升降运动、通过控制滚刀间距调节部件的动作控制两组除草滚刀之间的间距,除草滚刀与滚刀驱动电机传动连接,除草滚刀上沿其周向方向均布设有多个沿径向方向伸出设置的刀齿,刀齿是顶端向外侧弯折的l型结构;
8.所述的振动输送装置对应设置在除草装置的后方,包括支撑框架和链式滚动筛;前低后高设置的支撑框架的后端铰接安装在机体上、且支撑框架通过支撑框架翻转升降部件与机体连接,通过控制翻转升降部件的动作控制支撑框架绕其铰接中心进行翻转升降;链式滚动筛包括主动链轮、从动链轮和筛杆链带,主动链轮和从动链轮沿前后方向滚动设置安装在支撑框架上,筛杆链带包括沿左右方向水平设置、并沿前后方向平行密集设置的
筛杆和连接各筛杆的传动链,筛杆链带首尾闭合呈环形链带、并通过传动链配合套接安装在主动链轮和从动链轮上,主动链轮通过偏心轮与链轮驱动电机传动连接,通过控制链轮驱动电机的动作控制位于上层的筛杆链带一边振动一边自前向后移动;
9.所述的草料收集箱设置在振动输送装置的后方、且草料收集箱的顶部开口承接对应筛杆链带的后端设置;
10.所述的集中电控装置包括控制器、充电电池组、巡航定位模块、模式识别模块、断点续航模块、无线收发网络模块、机体运动控制回路、除草控制回路和振动输送控制回路,控制器分别与充电电池组、巡航定位模块、模式识别模块、断点续航模块、无线收发网络模块、机体驱动电机、机体转向机构、行走底盘距离传感器、模式识别传感器、滚刀驱动电机、滚刀升降驱动部件、滚刀间距调节部件、支撑框架翻转升降部件和链轮驱动电机电连接;
11.向控制器输入杂草的图像信息数据和巡航路径后启动集中电控装置,控制器通过巡航定位模块坐标定位后启动机体运动控制回路,控制器根据输入的巡航路径控制机体驱动电机和机体转向机构动作使机体沿巡航路径移动;沿巡航路径移动过程中,控制器通过摄像头实时反馈的图像信息和行走底盘距离传感器实时反馈的行走底盘与地面之间的距离信息识别田垄宽度、并控制机体转向机构动作进行微调机体的体位使除草滚刀正对田垄之间的位置,同时控制器根据输入的杂草图像信息数据将模式识别传感器实时反馈的图像信息进行对比、识别田垄之间滋生的杂草以及其位置,控制器通过无线收发网络模块利用网络大数据对杂草进行准确识别后,控制器启动滚刀驱动电机后控制滚刀升降驱动部件和滚刀间距调节部件动作使除草滚刀对应杂草位置调整位置的同时进行深入土壤的滚动除草,同时控制器启动链轮驱动电机后控制翻转升降部件的动作使支撑框架绕其铰接中心进行翻转降下贴近地面,上层的筛杆链带一边振动一边自前向后移动、将被除草滚刀带动抛出的杂草筛掉根部土壤后输送进入草料收集箱,实现智能除草;当充电电池组反馈低电量时,控制器控制机体移动至充电桩进行充电后、通过断点续航模块控制机体移动至断点位置继续进行除草作业。
12.作为本发明的进一步改进方案,草料收集箱底部设有与控制器电连接的称重传感器;待称重传感器反馈草料收集箱内收集的杂草达到设定重量时,控制器控制机体移动至设定的卸料位置进行卸料后、通过断点续航模块控制机体移动至断点位置继续进行除草作业。
13.作为本发明的进一步改进方案,除草滚刀沿前高后低的倾斜导向机构进行升降移动;除草作业时先控制支撑框架绕其铰接中心进行翻转降下贴近地面、再控制除草滚刀降下,实现除草滚刀在前后方向上更靠近支撑框架。
14.与现有技术相比,针对大田作物的大片田地进行除草作业时,向控制器输入大片田地中常见杂草的图像信息数据和巡航路径后启动集中电控装置,控制器通过巡航定位模块坐标定位后启动机体运动控制回路,控制器根据输入的巡航路径控制机体驱动电机和机体转向机构动作使机体沿巡航路径移动,沿巡航路径移动过程中,控制器通过摄像头实时反馈的图像信息和行走底盘距离传感器实时反馈的行走底盘与地面之间的距离信息识别田垄宽度、并控制机体转向机构动作进行微调机体的体位使除草滚刀正对田垄之间的易滋生杂草的位置,同时控制器根据输入的杂草图像信息数据将模式识别传感器实时反馈的图像信息进行对比、识别田垄之间滋生的杂草以及其位置,控制器启动滚刀驱动电机后控制
滚刀升降驱动部件和滚刀间距调节部件动作使除草滚刀对应杂草位置调整位置的同时进行深入土壤的滚动除草,同时控制器启动链轮驱动电机后控制翻转升降部件的动作使支撑框架绕其铰接中心进行翻转降下贴近地面,根部被除草滚刀切断的杂草同时被除草滚刀带动翻出抛至位于后方的链式滚动筛上,上层的筛杆链带一边振动一边自前向后移动、将杂草筛掉根部土壤后输送进入草料收集箱,实现智能除草,特别适用于针对大田作物的大片田地进行除草作业。
附图说明
15.图1是大田除草机的三维结构示意图;
16.图2是大田除草机机体内部的结构示意图;
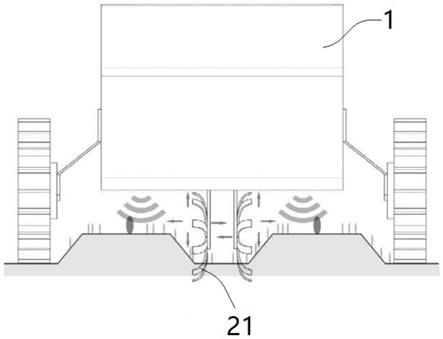
17.图3是大田除草机除草作业时的结构示意图。
18.图中:1、机体,2、除草装置,21、除草滚刀,3、振动输送装置,31、支撑框架,32、主动链轮,33、从动链轮,34、筛杆链带,35、铲装梳齿,4、草料收集箱。
具体实施方式
19.下面结合附图对本发明做进一步说明(以下以大田除草机的运行方向为前方进行描述,在左右方向上以指向机体1外部的方向为外侧方向进行描述)。
20.如图1、图2所示,大田除草机包括机体1、除草装置2、振动输送装置3、草料收集箱4和集中电控装置。
21.所述的机体1底部设有行走底盘,行走底盘包括驱动轮和机体转向机构,驱动轮与机体驱动电机传动连接,底盘驱动结构和机体转向结构是现有技术,在此不进行详述,行走底盘上设有用于侦测行走底盘与地面之间距离的行走底盘距离传感器和包括摄像头的模式识别传感器。
22.所述的除草装置2设置在机体1内底部,包括沿前后方向滚动设置的除草滚刀21,除草滚刀21相对于机体1左右对称设置为两组,两组除草滚刀21通过包括滚刀升降驱动部件的滚刀升降机构和包括滚刀间距调节部件的滚刀间距调节机构安装在机体1上,滚刀升降驱动部件可以直接采用电动缸或液压缸或气缸等伸缩缸结构、也可以采用配合的齿轮齿条结构等其他直线运动结构,滚刀间距调节部件可以采用单向伸缩的伸缩缸结构、也可以采用同步双向伸缩的伸缩缸结构等其他直线运动结构,通过控制滚刀升降驱动部件的动作可以实现控制两组除草滚刀21的升降运动、通过控制滚刀间距调节部件的动作可以实现控制两组除草滚刀21之间的间距,除草滚刀21与滚刀驱动电机传动连接,除草滚刀21上沿其周向方向均布设有多个沿径向方向伸出设置的刀齿,刀齿是顶端向外侧弯折的l型结构。
23.所述的振动输送装置3对应设置在除草装置2的后方,包括支撑框架31和链式滚动筛;前低后高设置的支撑框架31的后端铰接安装在机体1上、且支撑框架31通过支撑框架翻转升降部件与机体1连接,支撑框架翻转升降部件可以直接采用电动缸或液压缸或气缸等伸缩缸结构、也可以采用配合的齿轮齿条结构等其他直线运动结构,通过控制翻转升降部件的动作可以实现控制支撑框架31绕其铰接中心进行翻转升降;链式滚动筛包括主动链轮32、从动链轮33和筛杆链带34,主动链轮32和从动链轮33沿前后方向滚动设置安装在支撑框架31上,筛杆链带34包括沿左右方向水平设置、并沿前后方向平行密集设置的筛杆和连
接各筛杆的传动链,筛杆链带34首尾闭合呈环形链带、并通过传动链配合套接安装在主动链轮32和从动链轮33上,主动链轮32通过偏心轮与链轮驱动电机传动连接,通过控制链轮驱动电机的动作可以实现位于上层的筛杆链带34一边振动一边自前向后移动。
24.所述的草料收集箱4设置在振动输送装置3的后方、且草料收集箱4的顶部开口承接对应筛杆链带34的后端设置。
25.所述的集中电控装置包括控制器、充电电池组、巡航定位模块、模式识别模块、机体运动控制回路、除草控制回路和振动输送控制回路,控制器分别与充电电池组、巡航定位模块、模式识别模块、机体驱动电机、机体转向机构、行走底盘距离传感器、模式识别传感器、滚刀驱动电机、滚刀升降驱动部件、滚刀间距调节部件、支撑框架翻转升降部件和链轮驱动电机电连接。
26.使用大田除草机针对大田作物的大片田地进行除草作业时,向控制器输入大片田地中常见杂草的图像信息数据和巡航路径后启动集中电控装置,控制器通过巡航定位模块坐标定位后启动机体运动控制回路,控制器根据输入的巡航路径控制机体驱动电机和机体转向机构动作使机体1沿巡航路径移动,沿巡航路径移动过程中,如图3所示,控制器通过摄像头实时反馈的图像信息和行走底盘距离传感器实时反馈的行走底盘与地面之间的距离信息识别田垄宽度、并控制机体转向机构动作进行微调机体1的体位使除草滚刀21正对田垄之间的易滋生杂草的位置,同时控制器根据输入的杂草图像信息数据将模式识别传感器实时反馈的图像信息进行对比、识别田垄之间滋生的杂草以及其位置,控制器启动滚刀驱动电机后控制滚刀升降驱动部件和滚刀间距调节部件动作使除草滚刀21对应杂草位置调整位置的同时进行深入土壤的滚动除草,同时控制器启动链轮驱动电机后控制翻转升降部件的动作使支撑框架31绕其铰接中心进行翻转降下贴近地面,根部被除草滚刀21切断的杂草同时被除草滚刀21带动翻出抛至位于后方的链式滚动筛上,上层的筛杆链带34一边振动一边自前向后移动、将杂草筛掉根部土壤后输送进入草料收集箱4,实现智能除草。
27.为了进一步实现智能化,作为本发明的进一步改进方案,集中电控装置还包括与控制器电连接的断点续航模块,当充电电池组反馈低电量时,控制器控制机体1移动至充电桩进行充电后、通过断点续航模块控制机体1移动至断点位置继续进行除草作业。
28.为了避免因草料收集箱4集满而导致杂草无法继续收集,作为本发明的进一步改进方案,草料收集箱4底部设有与控制器电连接的称重传感器,待称重传感器反馈草料收集箱4内收集的杂草达到设定重量时,控制器控制机体1移动至设定的卸料位置进行卸料后、通过断点续航模块控制机体1移动至断点位置继续进行除草作业。
29.为了简化操作、进一步实现准确识别杂草,作为本发明的进一步改进方案,集中电控装置还包括与控制器电连接的无线收发网络模块,控制器可以通过无线收发网络模块利用网络大数据对杂草进行准确识别。
30.为了实现自动卸料,作为本发明的进一步改进方案,草料收集箱4的底部铰接安装在机体1上、且草料收集箱4与机体1之间还设有与控制器电连接的倾倒控制部件。通过控制倾倒伸缩缸的动作可以实现草料收集箱4绕其铰接中心翻转进行倾倒。
31.为了实现除草滚刀21在前后方向上更靠近支撑框架31、且避免除草滚刀21和支撑框架31升降过程中的运动干涉,作为本发明的进一步改进方案,除草滚刀21沿前高后低的倾斜导向机构进行升降移动,除草作业前,先控制支撑框架31绕其铰接中心进行翻转降下
贴近地面、再控制除草滚刀21降下,可以实现除草滚刀21在前后方向上更靠近支撑框架31。
32.为了实现将根部被除草滚刀21切断的杂草准确抛至位于后方的链式滚动筛上,作为本发明的进一步改进方案,除草滚刀21的外部设有底部和后部开放的导向罩,根部被除草滚刀21切断的杂草被除草滚刀21带动翻出后可沿导向罩向后方抛出落至后方的链式滚动筛上。
33.为了避免筛杆链带34输送过程中杂草自筛杆链带34左右两侧逃逸,作为本发明的进一步改进方案,支撑框架31的左右两侧均设有挡料板。
34.当根部被除草滚刀21切断的杂草同时被除草滚刀21带动翻出而未被抛至位于后方的链式滚动筛上时,为了便于收集位于地面的杂草,作为本发明的进一步改进方案,支撑框架31的前端设有凸出设置的铲装梳齿35,除草作业过程中,铲装梳齿35可深入土壤,实现位于地面的杂草可被铲装梳齿35翻起至链式滚动筛上。
35.为了减少安装空间的占用,作为本发明的进一步改进方案,链轮驱动电机是直接安装在主动链轮32轴心位置的轮毂电机结构,滚刀驱动电机是直接安装在除草滚刀21轴心位置的轮毂电机结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1