一种基于姿态调整的农田增产仪的制作方法
1.本发明涉及农业增产设备技术领域,具体涉及一种基于姿态调整的农田增产仪。
背景技术:
2.农业农村一直是我国非常重视的基础产业,随着农业农村事业的不断发展,经历了浇水、施肥、测土配方等阶段,在农业增产方面已经得到了非常大的发展。特别是应用频谱能量实现农业增产也得到了一定的应用,如专利公开号cn2100085、cn204653097u和cn215602094u,均提供了果树增产仪和农田丰产器,均是通过产生一系列类似于宇宙射线的电磁脉冲波激发作物依靠常规手段无法释放的生长潜能,达到提高作物生长速度、改善农产品品质,增加单位面积产量的目的。
3.现有技术中的增产仪一般为设置在固定位置的,其发射的频谱能量到达的区域有限,距离较近的果树能够得到较好的吸收,而距离较远的果树则效果并不明显。特别是朝向增产仪一侧的果树叶子能够得到较大的影响,而背面的叶子则影响较小。
4.因此,如何提供一种高效的农田增产仪,通过姿态调整实现有针对性的果树增产,是本领域技术人员的亟待解决的技术问题。
技术实现要素:
5.为此,本发明提供一种基于姿态调整的农田增产仪,以解决现有技术中存在的相关技术问题。
6.为了实现上述目的,本发明提供如下技术方案:
7.一种基于姿态调整的农田增产仪,包括移动底座,所述移动底座设于导轨内,还包括设置在所述移动底座上的支杆、铰接设置在所述支杆上端的第一弧形滑道、往复滑动在所述第一弧形滑道内的爬杆机器人以及安装在所述爬杆机器人上的增产机构;
8.还包括电动伸缩缸,所述电动伸缩缸下端与所述支杆铰接,所述电动伸缩缸上端与所述第一弧形滑道铰接;
9.还包括控制器,所述控制器设于所述移动底座上端,所述控制器电连接所述爬杆机器人、增产机构和电动伸缩缸。
10.进一步地,所述增产机构包括设置在爬杆机器人上的驱动电机、设置在所述驱动电机驱动轴端部的第二弧形滑道以及滑动设置在所述第二弧形滑道内的频谱发生器;
11.还包括滑块,所述滑块固定安装在所述频谱发生器的后端中部,所述滑块滑动在所述第二弧形滑道内。
12.进一步地,还包括喷嘴组、第一压力传感器组、第二压力传感器组和第三压力传感器组,所述喷嘴组竖向固定安装在所述频谱发生器前端,所述频谱发生器左右两侧分别设有第一压力传感器组和第二压力传感器组,所述第三压力传感器组设于所述第二弧形滑道两端部;所述第一压力传感器组、第二压力传感器组和第三压力传感器组均电连接所述控制器。
13.进一步地,所述第二弧形滑道包括中间段、第一段和第二段,所述第一段和第二段对称设于所述中间段两侧,所述中间段两侧通过弹性铰接点与所述第一段和第二段连接;
14.所述中间段低于所述第一段和第二段,且所述第一段和第二段与所述中间段平滑连接。
15.进一步地,还包括设置在所述频谱发生器内的推拉电磁铁和永磁铁,所述频谱发生器后端左右对称开设有两个穿出孔,所述推拉电磁铁端部固定连接所述永磁铁,所述推拉电磁铁电连接所述控制器;当所述推拉电磁铁通电时,所述推拉电磁铁和永磁铁隐藏在所述穿出孔内;当所述推拉电磁铁断电时,所述推拉电磁铁推动永磁铁穿出所述穿出孔外,两个所述永磁铁分别吸引接触所述第一段和第二段折叠,所述第一段和第二段隐藏在所述频谱发生器后端。
16.进一步地,当所述频谱发生器被挤压并滑动到所述第一段,且所述第三压力传感器组受到的压力大于所述第一压力传感器组时,所述控制器控制所述驱动电机带动所述第二弧形滑道朝向顺时针转动90度,并当所述第一压力传感器组受到的压力为零时,所述控制器控制所述驱动电机带动所述第二弧形滑道朝向逆时针转动90度。
17.进一步地,当所述频谱发生器被挤压并滑动到所述第二段,且所述第三压力传感器组受到的压力大于所述第二压力传感器组时,所述控制器控制所述驱动电机带动所述第二弧形滑道朝向逆时针转动90度,并当所述第二压力传感器组受到的压力为零时,所述控制器控制所述驱动电机带动所述第二弧形滑道朝向顺时针转动90度。
18.进一步地,还包括设于所述频谱发生器上下两端的坡面盒,所述坡面盒的坡面上设有自转轴辊。
19.进一步地,所述移动底座包括箱体和设于所述箱体下部的驱动机构,还包括设于所述箱体内的蓄电池、供液药箱、供液泵和供液管路,所述供液药箱通过供液管路连通所述供液泵的进口,所述供液泵的出口通过供液管路连通所述喷嘴组。
20.进一步地,还包括防护网,所述防护网固定安装在所述频谱发生器前端。
21.本发明具有如下优点:
22.本技术通过设置环绕果树的导轨和移动底座,使得农田增产仪能够在需要时绕着单颗果树转动,且频谱发生器向外发出的能量能够被果树叶子更加均匀的接收。并在绕导轨转动过程中可通过第一压力传感器组和第二压力传感器组实时监控频谱发生器是否与树枝产生触碰,通过控制器控制电动伸缩缸产生伸缩作用,从而调整第一弧形滑道与树枝之间的距离,减少触碰对频谱发生器的影响。
23.同时,控制器控制爬杆机器人在第一弧形滑道内上下往复移动,因此频谱发生器能够对果树底部、中部和上部均匀发生频谱,使得果树的能量接收更加均匀,提高增产效果;并在树枝触碰到频谱发生器后,频谱发生器能够在压力作用下向左或向右移动,从而适应性调整姿态,同时还能够当压力较大时,控制器能够控制驱动电机产生转动,使得频谱发生器发生翻转,避免树枝对频谱发生器的损伤。
24.同时,通过控制器对推拉电磁铁实现通断电,当通电状态下,永磁铁向外穿出并吸引第一段和第二段发生折叠,一方面减少第二弧形滑道长度,另一方面将频谱发生器限位在中间段上,配合电动伸缩缸使得第一弧形滑轨发生偏转带动频谱发生器进入到果树内部,从而进一步提高增产效果。
附图说明
25.为了更清楚地说明本发明的实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是示例性的,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图引伸获得其它的实施附图。
26.本说明书所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。
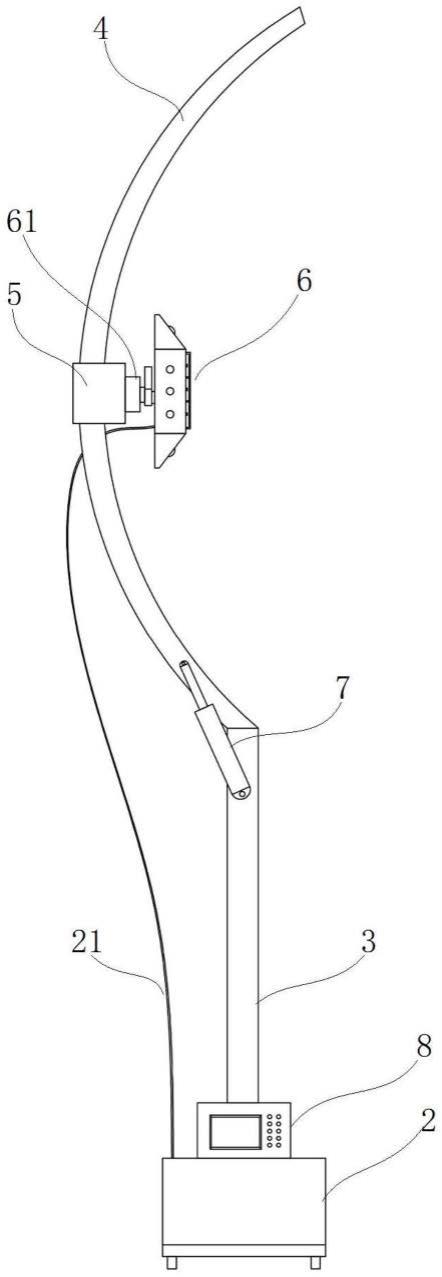
27.图1为本发明实施例提供的基于姿态调整的农田增产仪结构示意图;
28.图2为本发明实施例提供的导轨结构示意图;
29.图3为本发明实施例提供的图1中增产机构的放大图;
30.图4为本发明实施例提供的增产机构和第二弧形滑道安装结构示意图;
31.图5为本发明实施例提供的增产机构和第二弧形滑道分离结构示意图;
32.图6为本发明实施例提供的第二弧形滑道折叠结构示意图;
33.图7为本发明实施例提供的推拉电磁铁和永磁铁结构示意图;
34.图8为本发明实施例提供的移动底座内部结构示意图;
35.图中:
36.1导轨;2移动底座;201箱体;202驱动机构;3支杆;4第一弧形滑道;5爬杆机器人;6增产机构;61驱动电机;62第二弧形滑道;621中间段;622第一段;623第二段;63频谱发生器;64滑块;7电动伸缩缸;8控制器;9喷嘴组;10第一压力传感器组;11第二压力传感器组;12第三压力传感器组;13推拉电磁铁;14永磁铁;15穿出孔;16坡面盒;17自转轴辊;18蓄电池;19供液药箱;20供液泵;21供液管路;22防护网。
具体实施方式
37.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.为了解决现有技术中存在的相关技术问题,通过频谱发生器63的姿态调整提高频谱发生器63的增产效果。具体的,如图1-8,本技术实施例提供了一种基于姿态调整的农田增产仪,包括移动底座2,移动底座2设于导轨1内。此实施例中,如图1和2,导轨1设置形式为每个果树下为环形设置,另外相邻果树之间还设置有连通的导轨1结构,移动底座2通过控制器8进行控制在导轨1内移动。从而可在使用时,移动底座2带动整个增产仪首先在环形导轨1内移动对此颗树进行增产作业,当环绕1-2周后再通过连通的导轨1进入到下一颗树的环形导轨1内,继续完成增产作业,以此类推。
39.为了实现上述技术效果,如图1和3,本技术实施例还包括:设置在移动底座2上的支杆3、铰接设置在支杆3上端的第一弧形滑道4、往复滑动在第一弧形滑道4内的爬杆机器人5以及安装在爬杆机器人5上的增产机构6。还包括控制器8,控制器8设于移动底座2上端,
控制器8电连接爬杆机器人5、增产机构6和电动伸缩缸7。
40.支杆3为竖向固定在移动底座2上的,为第一弧形滑道4和其上的爬杆机器人5以及增产机构6起到主体支撑效果。其中,第一弧形滑道4的弯曲内侧朝向果树,与果树外形相匹配,还包括电动伸缩缸7,电动伸缩缸7下端与支杆3铰接,电动伸缩缸7上端与第一弧形滑道4铰接。在使用时,在控制器8的控制下,电动伸缩杆通过伸缩动作带动第一弧形滑道4远离或靠近果树,以期最大程度靠近果树但又减少树枝的触碰。并在绕导轨1转动过程中可通过第一压力传感器组10和第二压力传感器组11实时监控频谱发生器63是否与树枝产生触碰,通过控制器8控制电动伸缩缸7产生伸缩作用,从而调整第一弧形滑道4与树枝之间的距离,减少触碰对频谱发生器63的影响。
41.爬杆机器人5属于现有技术中常用的设备,同时,控制器8控制爬杆机器人5在第一弧形滑道4内上下往复移动,因此频谱发生器63能够对果树底部、中部和上部均匀发生频谱,使得果树的能量接收更加均匀,提高增产效果。
42.因此,移动底座2带动支杆3和其上的第一弧形滑道4在导轨1内转动,在此过程中,爬杆机器人5带动其上的频谱发生器63上下移动。本技术通过设置环绕果树的导轨1和移动底座2,使得农田增产仪能够在需要时绕着单颗果树转动,且频谱发生器63向外发出的能量能够被果树叶子更加均匀的接收。
43.基于上述结构,进一步地,增产机构6包括设置在爬杆机器人5上的驱动电机61、设置在驱动电机61驱动轴端部的第二弧形滑道62以及滑动设置在第二弧形滑道62内的频谱发生器63;其中,频谱发生器63在控制器8的控制下向外发出频谱,具体原理属于现有技术,在此不再赘述。
44.此实施例中,如图4和5,还包括滑块64,滑块64固定安装在频谱发生器63的后端中部,滑块64滑动在第二弧形滑道62内。因此在使用时,当频谱发生器63触碰到树枝时,树枝可能推动频谱发生器63在第二弧形滑道62内滑动,从而被动改变了姿态。
45.在使用过程中,频谱发生器63容易触碰到树枝,因此为了实现对频谱发生器63触碰树枝的监控和动态调整频谱发生器63的姿态,进一步地,如图3-5,还设置了第一压力传感器组10、第二压力传感器组11和第三压力传感器组12。频谱发生器63左右两侧分别设有第一压力传感器组10和第二压力传感器组11,第三压力传感器组12设于第二弧形滑道62两端部,其中第二弧形滑道62的两端部分别设置一组第三压力传感器组12;第一压力传感器组10、第二压力传感器组11和第三压力传感器组12均电连接控制器8,控制器8用于接收第一压力传感器组10、第二压力传感器组11和第三压力传感器组12的压力信号,并通过压力信号的判断来实现频谱发生器63姿态的调整。
46.如图5,第二弧形滑道62包括中间段621、第一段622和第二段623,第一段622和第二段623对称设于中间段621两侧,中间段621两侧通过弹性铰接点与第一段622和第二段623连接;中间段621低于第一段622和第二段623,且第一段622和第二段623与中间段621平滑连接。基于上述结构,在子让状态时,第一段622和第二段623对称设置在中间段621的两侧,且中间段621为最低处,从而频谱发生器63设置在中间段621上,在爬杆机器人5的带动下上下滑动;而当受到来自树枝左侧或右侧的挤压作用时,会滑动到第一段622或第二段623中,并在挤压力消除时,由于频谱仪的重力作用会回落到中间段621中。此实施例中,第一段622和中间段621以及第二段623和中间段621铰接点为弹性铰接,且铰接点设置在两者
连接的上端部,保证第二弧形滑道62使用过程中的稳定。
47.本技术实施例还具有下述的使用方式:
48.当频谱发生器63被挤压并滑动到第一段622,并在树枝的推动下滑块64触碰到第三压力传感器组12,且第三压力传感器组12受到的压力大于第一压力传感器组10时,控制器8控制驱动电机61带动第二弧形滑道62朝向顺时针转动90度,并当第一压力传感器组10受到的压力为零时,控制器8控制驱动电机61带动第二弧形滑道62朝向逆时针转动90度。
49.当频谱发生器63被挤压并滑动到第二段623,并在树枝的推动下滑块64触碰到第三压力传感器组12,且第三压力传感器组12受到的压力大于第二压力传感器组11时,控制器8控制驱动电机61带动第二弧形滑道62朝向逆时针转动90度,并当第二压力传感器组11受到的压力为零时,控制器8控制驱动电机61带动第二弧形滑道62朝向顺时针转动90度。
50.同时,在上述过程中,还可以通过控制器8控制电动伸缩缸7伸缩作用,配合频谱发生器63和第一弧形滑道4远离或靠近果树,能够在发挥增产目的的同时,避免频谱发生器63出现暴力损坏。
51.通过上述使用方式可知,当果树树枝对频谱发生器63的挤压作用力较大时,频谱发生器63不仅在第二弧形滑道62上发生移动,还通过第一压力传感器组10、第二压力传感器组11和第三压力传感器组12对树枝挤压压力的监测,进行姿态的调整。一方面是避开树枝减少对频谱发生器63的损伤,另一方面主动和被动的姿态调整更加有利于爬杆机器人5带动增产机构6的移动。
52.综上,在树枝触碰到频谱发生器63后,频谱发生器63能够在压力作用下向左或向右移动,从而适应性调整姿态,同时还能够当压力较大时,控制器8能够控制驱动电机61产生转动,使得频谱发生器63发生翻转,避免树枝对频谱发生器63的损伤。
53.使用中,频谱发生器63在爬杆机器人5的上下带动作用下移动,为了避免对频谱发生器63上下端的影响,进一步地,还在频谱发生器63上下两端设置了坡面盒16,坡面盒16的坡面上设有自转轴辊17。因此,坡面盒16的设置能够使得频谱发生器63的上下两端相对平滑,从而减少树枝的直接挤压得影响,自转轴辊17起到导向作用。
54.上述使用过程主要是对果树的外围树枝进行作用,对果树内部的树枝作用较弱,因此为了实现更好的增产效果,本技术实施例还可通过带动第一弧形滑道4朝向果树缝隙带动频谱发生器63移动,进入到果树内部进行增产作业。为了减少横向设置的第二弧形滑道62的影响,本技术实施例还设置了如下结构:
55.还包括设置在频谱发生器63内的推拉电磁铁13和永磁铁14,如图6和7,频谱发生器63后端左右对称开设有两个穿出孔15,推拉电磁铁13端部固定连接永磁铁14,推拉电磁铁13电连接控制器8;当推拉电磁铁13通电时,推拉电磁铁13和永磁铁14隐藏在穿出孔15内;当推拉电磁铁13断电时,推拉电磁铁13推动永磁铁14穿出穿出孔15外,两个永磁铁14分别吸引接触第一段622和第二段623折叠,第一段622和第二段623隐藏在频谱发生器63后端。
56.通过控制器8对推拉电磁铁13实现通断电,当通电状态下,永磁铁14向外穿出并吸引第一段622和第二段623发生折叠,一方面减少第二弧形滑道62长度,另一方面将频谱发生器63限位在中间段621上,配合电动伸缩缸7使得第一弧形滑轨发生偏转带动频谱发生器63进入到果树内部,从而进一步提高增产效果。
57.进一步地,如图8,移动底座2包括箱体201和设于箱体201下部的驱动机构202,还包括设于箱体201内的蓄电池18、供液药箱19、供液泵20和供液管路21,供液药箱19通过供液管路21连通供液泵20的进口,供液泵20的出口通过供液管路21连通喷嘴组9。其中,喷嘴组9竖向固定安装在频谱发生器63前端,通过控制器8对供液泵20的控制,供液药箱19内的药液或水能够通过随着频谱发生器63的移动而向外均匀喷出药液,从而实现灭虫、湿润等功能,提高增产效果。蓄电池18为控制器8等部件提供动力源。
58.为了减少树枝对频谱发生器63正面得损坏,还设置了防护网22,防护网22固定安装在频谱发生器63前端。防护网22通过螺栓或焊接方式固定在频谱发生器63的前端上,且防护网22的设置避开了喷嘴组9的位置,从而不会对喷嘴组9产生影响。
59.虽然,上文中已经用一般性说明及具体实施例对本发明作了详尽的描述,但在本发明基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本发明精神的基础上所做的这些修改或改进,均属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1