一种通过智能脖环实时监测和定位奶牛的系统的制作方法
1.本发明适用于奶牛监测领域,具体涉及一种通过智能脖环实时监测和定位奶牛的系统。
背景技术:
2.目前,中国乳品行业正在迅速发展,人们对奶制品的需求日益增长,奶牛作为奶制品的提供主体,对奶制品的供应具有决定性的作用,现有奶牛饲养主要分布在我国内蒙古等地,奶牛饲养技术已经实现半自动化管理,奶牛饲养过程中,最重要的需要监测奶牛的反刍、采食、发情、静止等动作信息,而现在对上述各信息的监测都是分别独立实施,比如对奶牛单独反刍、单独活动、单独定位,而单独监测技术耗费管理资源,无法实现多角度对奶牛健康状况的管理,且单独定位一般采用gps技术定位,由于地面牛舍内信号弱,导致经常出现漏定位的情况,且gps定位技术启动时间长,耗电量快,不适合电池设备的长久使用。
技术实现要素:
3.为了解决上述技术问题,本发明提供一种集对奶牛反刍、活动、定位等功能于一体的监测系统,具体为一种通过智能脖环实时监测和定位奶牛的系统,旨在实现对奶牛饲养过程中的管理监测,实现奶牛饲养的智能化管理。
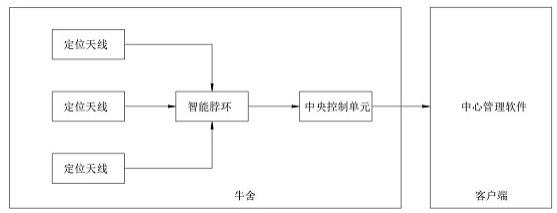
4.本发明所采用的技术方案是:提供一种通过智能脖环实时监测和定位奶牛的系统,具体包括定位天线、智能脖环、中央控制单元和中心管理软件;所述定位天线用于监测奶牛的位置信息,并将奶牛位置信息发送给智能脖环,由智能脖环传送至中央控制单元;所述智能脖环用于监测奶牛的各种动作信息,并将该动作信息传送给中央控制单元;所述中央控制单元用于发送定位指令给定位天线,接收智能脖环传送的奶牛位置信息和奶牛动作信息,并将接收到的数据信息再分发给中心管理软件,同时接收中心管理软件的用户配置参数, 将该配置参数再下发给定位天线和智能脖环。其中中心管理软件可以适用于app软件,安装在奶牛管理使用人的移动设备中。
5.优选的,所述定位天线包括无线通信单元1、运算单元1和无线唤醒单元1,所述运算单元1将配置参数请求中所配置的定位信息传送给无线通信单元1,无线通信单元1通过射频芯片接收发送相应的无线数据;所述无线唤醒单元1通过接收低频无线信号唤醒处于低功耗下的运算单元1。
6.为实现低功耗,定位天线不工作时一直处于低功耗状态,定位天线通过内部低功耗定时器每隔配置的间隔时间发生相应的处理事件,需要启动工作时,由无线唤醒单元1唤醒,接收中央控制单元的控制命令,并根据接收到的命令将定位到的奶牛位置信息发送给智能脖环;该处理过程用时一般为50ms以内。处理完后定位天线恢复至低功耗状态,如此可节约功耗,实现长久使用。
7.优选的,所述智能脖环包括无线通信单元2、运算单元2、加速度传感器和无线唤醒单元2,所述加速度传感器用于监测奶牛的各种动作信息,并将相应的数据信息传送给运算
单元2,由运算单元2运用相应的计算方法判断出奶牛的反刍、采食、发情、运动静止动作信息,并将计算后获得的相应数据信息发送给无线通信单元2,所述无线通信单元2通过无线射频芯片将接收来自运算单元2的数据信息传送给中央控制单元,并及时接收中央控制单元和定位天线的数据信息;所述无线唤醒单元2通过接收低频无线信号唤醒处于低功耗下的运算单元2。
8.为实现低功耗,智能脖环通过内部低功耗定时器,可以设定每隔5s对多轴加速度传感器采集的奶牛动作信息进行采集,并对其中包含的各轴数据进行滑动滤波处理,滤波处理后的数据进行相对运动幅度的调整,得出的运动量总和与阈值进行对比,对比得出运动的高活动量、反刍、静止等运动情况,再进行各情况的次数累加,形成最终的奶牛动作信息数据并上报中央控制单元。
9.智能脖环在将数据信息上报给中央控制单元前,对无线频段进行能量监测,若能量值较低说明此时无线频段较为空闲,可发送数据,若能量值较高说明此频段有数据交互,为避免数据碰撞,智能脖环将延时进行数据交互。
10.优选的,所述中央控制单元包括无线通信单元3、无线通信单元4、无线通信单元5、无线通信单元6、运算单元3和存储单元;所述无线通信单元3用于接收智能脖环发送的奶牛动作信息,再传送给运算单元3,并将运算单元3反馈的数据信息传送给智能脖环;所述无线通信单元4将运算单元3生成的时间同步数据信息传送给智能脖环和定位天线;所述无线通信单元5通过4g信号或者mesh网络将运算单元3中的数据信息传输给中心管理软件,并且接收来自中心管理软件的参数配置以及查询指令;所述无线通信单元6用于接收智能脖环发送的奶牛位置信息,并传送给运算单元3;所述运算单元3运算所接收到的奶牛位置信息和奶牛动作信息数据,并将数据结果保存在存储单元。
11.中央控制单元里的运算单元3通过无线通信单元5向中心管理软件请求配置参数信息,在获得配置参数信息进行解析,将解析后的数据信息保存在存储单元内。通过无线通信单元4将运算单元3生成的时间同步数据信息传送给智能脖环和定位天线,接收智能脖环返回的奶牛位置信息数据;通过无线通信单元3接收智能脖环返回的奶牛动作信息,并将接收到的中心管理软件的配置参数反馈给智能脖环。
12.优选的,所述定位天线每间隔30米设置在饲养奶牛的牛舍中,且每个牛舍中心设置一个中央控制单元,当然根据奶牛饲养的环境和实际条件,可以对定位天线之间的间隔设置距离和数量进行动态调整。
13.优选的,定位天线每隔20分钟接收一次中央控制单元指令;智能脖环每隔2小时与中央控制单元进行信息传输,当然根据奶牛饲养的管理要求,可以对定位天线、智能脖环与中央控制单元之间的数据传送频率进行动态调整。
14.本发明的有益效果:采用本发明所述的一种通过智能脖环实时监测和定位奶牛的系统,可以实现管理者或者使用者通过移动设备上安装对应的中心管理软件配置相关的奶牛管理参数,精准的寻找到奶牛的实时位置坐标以及奶牛的动作信息,用于实时观察奶牛反刍、采食、发情、运动静止动作信息,实现对奶牛的自动化管理。具体的可以体现在以下几个方法:(一)、高效检测出奶牛的发情情况;实现奶牛发情检出率达到98%以上,缩短全群
牛只的产犊间隔,减少奶牛的饲料成本,提高牧场繁殖效率;(二)、高效监测奶牛的运动、健康状态:实现对奶牛反刍、采食、趴跨、躺卧等多种行为和状态的监测,实时掌握奶牛的健康状况,并根据该数据改善奶牛管理,比如过度拥挤、缺乏日常管理、饲料成份和牛舍建设等;(三)、便捷管理:通过将对奶牛反刍、活动、定位等功能于一体的监测系统,实现奶牛管理的智能化、自动化,为奶牛管理提供科学管理手段。
15.附图说明
16.图1为本发明一种通过智能脖环实时监测和定位奶牛的系统结构原理图;图2为图1中定位天线的结构原理图;图3为图1中智能脖环的结构原理图;图4为图1中智能脖环的正面结构示意图;图5为图1中智能脖环的反面结构示意图;图6为图1中央控制单元的结构原理图;图7为图1结合图2、图3、图6后的结构原理图;图8为本发明应用在牧场牛舍内的结构示意图;图8中:1-定位天线、2-智能脖环、3-中央控制单元。
具体实施方式
17.以下结合具体附图对本发明作进一步的说明。
18.如图1所示,提供一种通过智能脖环实时监测和定位奶牛的系统结构,包括定位天线,智能脖环、中央控制单元和中心管理软件;如图2所示,定位天线包括无线通信单元1、运算单元1和无线唤醒单元1,所述运算单元1将配置参数请求中所配置的定位信息传送给无线通信单元1,无线通信单元1通过射频芯片接收发送相应的无线数据;无线唤醒单元1通过接收低频无线信号唤醒处于低功耗下的运算单元1。
19.如图3所示,智能脖环包括无线通信单元2、运算单元2、加速度传感器和无线唤醒单元2;如图4-图5所示,为智能脖环的正面、反面立体结构图;该智能脖环穿戴在奶牛的下颌处,其中加速度传感器用于监测奶牛的各种动作信息,并将相应的数据信息传送给运算单元2,由运算单元2运用相应的计算方法判断出奶牛的反刍、采食、发情、运动静止动作信息,并将计算后获得的相应数据信息发送给无线通信单元2,所述无线通信单元2通过无线射频芯片将接收来自运算单元2的数据信息传送给中央控制单元,并及时接收中央控制单元和定位天线的数据信息;所述无线唤醒单元2通过接收低频无线信号唤醒处于低功耗下的运算单元2。
20.如图6、图7所示,中央控制单元包括无线通信单元3、无线通信单元4、无线通信单元5、无线通信单元6、运算单元3和存储单元;所述无线通信单元3用于接收智能脖环发送的奶牛动作信息,再传送给运算单元3,并将运算单元3反馈的数据信息传送给智能脖环;所述
无线通信单元4将运算单元3生成的数据信息传送给智能脖环和定位天线;所述无线通信单元5通过4g信号或者mesh网络将运算单元3中的数据信息传输给中心管理软件,并且接收来自中心管理软件的参数配置以及查询指令;所述无线通信单元6用于接收智能脖环发送的奶牛位置信息,并传送给运算单元3;其中运算单元3运算所接收到的奶牛位置信息和奶牛动作信息数据,并将数据结果保存在存储单元。
21.定位天线用于监测奶牛的位置信息,并将奶牛位置信息发送给智能脖环,由智能脖环传送至中央控制单元;所述智能脖环用于监测奶牛的各种动作信息,并将该动作信息传送给中央控制单元;所述中央控制单元用于发送定位指令给定位天线,接收智能脖环传送的奶牛位置信息和奶牛动作信息,并将接收到的数据信息再分发给中心管理软件,同时接收中心管理软件的用户配置参数, 将该配置参数再下发给定位天线和智能脖环。
22.如图8所示,为本发明应用在牧场牛舍内的一个场景,定位天线(见图8中标号1)每间隔30米设置在饲养奶牛的牛舍中,智能脖环(见图8中标号2)穿戴在奶牛下颌处,每个牛舍中心设置一个中央控制单元(见图8中标号3),可以安装在牛舍中间的横梁上。
23.牛舍中安装好定位天线和中央控制单元后,中央控制单元首先获取中心管理软件中的设备配置,并通过无线通信单元4定时发送定位同步信息,同步信息中主要包含定位天线发送信标时间、开始定时时间、以及定时时长等;定位天线每隔20分钟接收一次中央控制单元的同步信息,在接收到中央控制单元的同步信息指令后,开始通过同步信息中的信标发送时间n,以及每个定位天线配置好相应的发送时间片mi来计算自身发送信标的时间点,每个定位天线的时间点是按照下来规则设置:1号定位天线为n+m1、2号定位天线为n+m2、3号定位天线为n+m3,以此类推,k号定位天线为n+mk,发送信标给智能脖环用于计算奶牛的对应位置信息,发送完成后,待20分钟后再次接收来自中央控制单元的同步信息,如此循环。
24.牛只佩戴好脖环后,默认定位是关闭的,奶牛在牛舍中采食、运动、卧床、反刍等动作时,佩戴在牛脖处的智能脖环每隔一定时间对牛只的数据进行采集、运算,并将运算的数据每2个小时上传给中央控制单元的无线通信单元3,中央控制单元接收到牛只上传的脖环数据后,将从中心管理软件中获取到智能脖环配置参数反馈给智能脖环,以此方式来修改智能脖环中的参数值,该参数中包含了脖环的同步时间、定位开启时间、定位时长、各滤波参数、以及反刍、采食、运动、静止等动作的判定阈值等。
25.智能脖环通过上述方式接收参数配置,并设定了具体的定位时间,以及定位时长时,同步好当前时间的智能脖环会开始等待接收来自中央控制单元中无线通信单元4发出的同步信息,同步信息中包含距离定位天线发送定位信息的时间。智能脖环接收到此同步信息后,将此时间作为定时时间,时间到达后,智能脖环整体进入工作状态,等待接收各定位天线发出的定位信息。若30ms内未接收到定位信息,脖环将再次进入睡眠状态,并定时重新接收中央控制单元中无线通信单元4发送的同步信息。
26.若接收到各定位天线发送的定位信息后,智能脖环筛选出信号最强的3个信号值,上报给中央控制单元的无线通信单元4,无线通信单元4将脖环数据传输给运算单元3,运算单元3通过以下的计算公式,将此智能脖环的信号值转换成相应的实际距离:d = 10^((abs(rssi)
ꢀ‑ꢀ
a) / (10 * n))d为计算所得距离;rssi为接收信号强度(负值);a为发射端和接收端相隔1米的信
号强度;n为环境衰减因子。公式中n和a需要根据现场的真实环境进行参数修改。
27.如图8所示,每个定位天线都有其固定的位置,设:西北角第一个定位天线为1号点,第二个天线为2号点,以此类推,直至n号点,再以西南角第一个天线为n+1号点顺序定义。 假设图中定位天线行间距为20,列间距为30,那么1号点作为为(0,0),2号点坐标为(30,0),n+1号点坐标为(0,20),结合定位天线的坐标和信号最强三点到智能脖环的距离,再通过三点定位的算法求解出智能脖环在牛舍平面中的坐标。具体求解如下:求解的智能脖环坐标点是以三个已知信号最强点为圆心,以他们与智能脖环之间的距离为半径画出的三个圆的交点,具体公式如下:(x1
ꢀ–ꢀ
x)^2 + (y1-y)^2 = r1^2(x2
ꢀ–ꢀ
x)^2 + (y2-y)^2= r2^2(x3
ꢀ–ꢀ
x)^2 + (y3-y)^2= r3^2通过上述可得出x、y的数值,该数值即为智能脖环的坐标点,也即奶牛的位置坐标。所得奶牛坐标位置信息会保存在中央控制单元的存储单元中,当中心管理软件获取此奶牛位置信息时,由中央控制单元发送给中心管理软件。
28.本发明上述对奶牛位置信息的获取保证整个系统的低功耗,延长使用寿命,同时实现数据交互的实时性,该方式不受室内、室外信号强弱的影响,可以稳定应用于牧场,实现奶牛管理的现代化、智能化。
29.以上内容是结合具体的优选实施方式对本技术所作的进一步详细说明,不能认定本技术的具体实施只局限于这些说明,对于本技术所属技术领域的技术人员来说,在不脱离本技术构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1