一种智能播种机器人
1.本实用新型涉及农业播种的技术领域,具体涉及一种智能播种机器人。
背景技术:
2.随着时代不断发展,世界所造成的生态破坏愈发严重,依靠国家绿色可持续发展政策的实施和监督,不断控制过度的产品进入市场,鼓励绿色机械制造产品的创新和推广,严格执行节能减排的概念,并逐步实现绿色概念在机械制造中的应用;同时为响应国家的号召,我们在日常生活中观察到,实现城市绿化或是荒漠拯救等治理计划中花费了大量的人力和物力,导致治理效率较为缓慢,尤其在我们的城市绿化和荒漠种植中,通过植树、种草等措施加快现有沙化土地的植被恢复工作,人力成本较高。
3.我国地形复杂多样,山区面积广大,山地和丘陵的面积约占全国总面积的三分之二,虽然我国有一些地区(比如北方平原地区)农村耕作播种机械化水平比较高。但对于一些南方凹凸不平的丘陵地区及一些地质较软荒漠沙地地区,和在一些复杂城市绿化带地区,大型农业机械根本无法开进也无法应用到这些地方。
4.现有技术中,存在小型播种机器人,但其智能化程度较低,还需配合人工进行灌溉,降低了播种效率。
技术实现要素:
5.本实用新型的目的在于提供一种智能播种机器人,解决上述背景技术中的问题。
6.为实现上述目的,本实用新型采用的技术方案是提供一种智能播种机器人,包括安装架、播种机构和灌溉机构,播种机构设于所述安装架上,包括依次连接的盛种箱和播种器,所述播种器包括动力件、播种组件和播种管,所述动力件驱动所述播种组件定量向所述播种管播种;灌溉机构设于所述安装架上且位于所述播种机构的一侧,包括水箱和排水管,所述排水管与所述播种管相连通,所述排水管上设有控制阀门;所述动力件通过驱动结构与所述控制阀相连接,所述动力件驱动所述播种组件和所述控制阀门同时动作。
7.进一步地,所述盛种箱的底部设有供种子通过的筛料口,所述播种组件包括滚筒和下料漏斗,所述滚筒位于所述下料漏斗内,所述盛种箱与所述下料漏斗相连接,所述滚筒的转动轴线平行于所述筛料口,所述滚筒侧壁设有适于与筛料口相连通的入口,所述动力件适于驱动所述滚筒在所述下料漏斗内转动。
8.进一步地,所述盛种箱的底部设有大小不同的多个筛料口,所述筛料口处可拆卸地连接有挡料片,所述挡料片适于遮挡所述筛料口。
9.进一步地,所述动力件通过设置的传动轴与所述滚筒相连接,所述驱动结构包括齿轮组和连杆组件,所述齿轮组设置在所述传动轴的输出端,所述连杆组件一端与所述齿轮组相连接,另一端与所述控制阀相连接,所述动力件转动带动所述连杆组件驱动所述控制阀开闭。
10.进一步地,智能播种机器人还包括设于安装架上的挖土机构,所述挖土机构设置
在所述播种机构的上游位置,所述挖土机构包括挖孔钻和输送组件,所述输送组件驱动所述挖孔钻挖孔并将挖出的土壤输送至指定位置。
11.进一步地,所述挖土机构还包括设置在安装架上的限位开关,所述限位开关适于限定所述挖孔钻的下移高度。
12.进一步地,智能播种机器人还包括填土机构,所述填土机构位于所述挖土机构的下游,所述填土机构包括储土桶和导土组件,所述输送组件适于将挖出的土壤输送至储土桶内,所述导土组件位于所述储土桶内,并适于将所述储土桶内的土壤从一端的出土口输送出。
13.进一步地,所述出土口位于所述挖孔钻的下游位置。
14.进一步地,智能播种机器人还包括行走机构,所述行走机构采用履带式机构,所述行走机构位于所述安装架的底端并适于驱动整个智能播种机器人移动。
15.进一步地,所述行走机构包括两个驱动电机,两个所述驱动电机分别与其中一个履带连接,两个所述驱动电机分别独立控制。
16.本实用新型的有益效果在于:
17.1、动力件启动并分别带动播种组件和控制阀门动作,播种组件动作后,可将盛种箱内的种子运送到播种管内,然后再掉落到土壤内进行播种。由于在播种组件动作的同时,控制阀门也发生动作,此时水从水箱内流出,对播种的种子进行及时灌溉,即在播种的同时也能进行灌溉,无需再额外配备洒水车进行灌溉,智能化程度高,大大提高了播种效率。同时,通过一个动力件来同时控制播种和灌溉的动作,大大提高了动力件的利用率,无需再额外配备一个动力件,节省播种机器人的制造成本。
18.2、盛种箱的底部设有供种子通过的筛料口,滚筒位于下料漏斗内,盛种箱与下料漏斗相连接,滚筒的转动轴线平行于所述晒料口,滚筒侧壁设有适于与晒料口相连通的入口,动力件驱动滚筒在下料漏斗内转动。在滚筒转动的过程中,当滚筒上的入口恰好与筛料口相对时,盛种箱内的种子落入到滚筒内,随着滚筒继续转动,当入口与下料漏斗的口部相对时,滚筒的内种子可以落入到下料漏斗内,进而完成播种的过程。采用滚筒的形式进行播种,可以实现定量播种,避免导致种子一次性下料较多,造成浪费。
19.3、盛种箱的底部设有大小不同的多个筛料口,筛料口处可拆卸地连接有挡料片,挡料片适于遮挡筛料口。由于不同种子的大小差别较大,通过设置多个不同的晒料口,可是有效的实现多种不同作物的播种。根据实际需求,筛选其中一个大小合适的晒料口,其余的晒料口用挡料片进行封堵遮挡。
20.4、挖土机构还包括设置在安装架上的限位开关,限位开关适于限定挖孔钻的下移高度。由于不同作物在播种时有适宜的播种深度,通过限定挖空钻的下移高度,可以实现不同深度的挖孔,使得播种机可以实现多种作物的播种作业,更加智能化。
21.5、填土机构位于挖土机构的下游,挖土机构将挖出的土运送到储土桶内,然后当播种和灌溉完成后,储土桶内的土壤再通过输送组件运送到原处对种子进行覆盖。
22.6、行走机构包括两个驱动电机,两个驱动电机分别与其中一个履带连接,两个驱动电机别分别独立控制。当小车的动力传递给驱动轮时,驱动轮拉动履带,从而在地面和履带之间产生相互作用。使之移动,两条履带分别由两个独立的电机控制,可以利用差速进行转弯。
附图说明
23.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
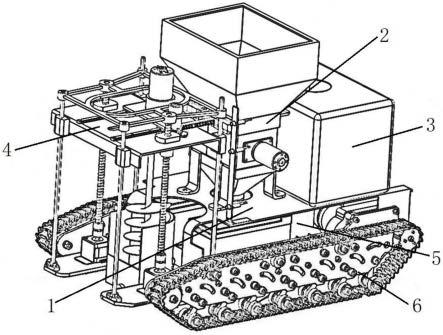
24.图1为本实用新型实施例提供的一种只智能播种机器人的立体结构示意图;
25.图2为本实用新型实施例提供的一种只智能播种机器人的侧视图;
26.图3为本实用新型实施例提供的一种只智能播种机器人的爆炸图;
27.图4为本实用新型实施例提供的一种只智能播种机器人所采用的播种机构的整体结构示意图;
28.图5为本实用新型实施例提供的一种只智能播种机器人所采用的播种机构的另一视角整体结构示意图;
29.图6为本实用新型实施例提供的一种只智能播种机器人所采用的灌溉机构的整体结构示意图;
30.图7为本实用新型实施例提供的一种只智能播种机器人所采用的填土机构的整体结构示意图;
31.图8为本实用新型实施例提供的一种只智能播种机器人所采用的行走机构的整体结构示意图;
32.附图标记说明:
33.1、安装架;2、播种机构;21、盛种箱;211、筛料口;212、挡料片;22、播种器;221、动力件;222、播种管;223、滚筒;224、下料漏斗;225、传动轴;226、齿轮组;227、连杆组件;3、灌溉机构;31、水箱;32、排水管;321、控制阀门;4、挖土机构;41、挖孔钻;42、输送组件;5、填土机构;51、储土桶;511、出土口;52、导土组件;6、行走机构;61、驱动电机。
具体实施方式
34.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
35.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
36.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
37.此外,下面所描述的本实用新型不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
38.参照图1-8,作为本实用新型实施例提供的一种智能播种机器人,包括安装架1、播种机构2和灌溉机构3,播种机构2设于安装架1上,播种机构2包括依次连接的盛种箱21和播种器22,播种器22包括动力件221、播种组件和播种管222,动力件221驱动播种组件定量向播种管222播种;灌溉机构3设于安装架1上且位于播种机构2的一侧,灌溉机构3包括水箱31和排水管32,排水管32与播种管222相连通,排水管32上设有控制阀门321;动力件221通过驱动结构与控制阀相连接,动力件221驱动播种组件和控制阀门321同时动作。
39.动力件221启动并分别带动播种组件和控制阀门321动作,播种组件动作后,可将盛种箱21内的种子运送到播种管222内,然后再掉落到土壤内进行播种。由于在播种组件动作的同时,控制阀门321也发生动作,此时水从水箱31内流出,对播种的种子进行及时灌溉,即在播种的同时也能进行灌溉,无需再额外配备洒水车进行灌溉,智能化程度高,大大提高了播种效率。同时,通过一个动力件221来同时控制播种和灌溉的动作,大大提高了动力件221的利用率,无需再额外配备一个动力件221,节省播种机器人的制造成本。
40.具体地,动力件221采用现有技术中的电机,盛种箱21的底部设有供种子通过的筛料口211,播种组件包括滚筒223和下料漏斗224,滚筒223位于下料漏斗224内,盛种箱21与下料漏斗224相连接,滚筒223的转动轴线平行于筛料口211,滚筒223侧壁设有适于与筛料口211相连通的入口,动力件221适于驱动滚筒223在下料漏斗224内转动。在滚筒223转动的过程中,当滚筒223上的入口恰好与筛料口211相对时,盛种箱21内的种子落入到滚筒223内,随着滚筒223继续转动,当入口与下料漏斗224的口部相对时,滚筒223的内种子可以落入到下料漏斗224内,进而完成播种的过程。采用滚筒223的形式进行播种,可以实现定量播种,避免导致种子一次性下料较多,造成浪费。动力件221通过设置的传动轴225与滚筒223相连接,传动轴225穿射滚筒223且沿着滚筒223的轴向设置,且一端延伸出滚筒223。驱动结构包括齿轮组226和连杆组件227,齿轮组226设置在传动轴225的输出端,连杆组件227一端与齿轮组226相连接,另一端与所述控制阀相连接,动力件221转动带动连杆组件227驱动控制阀开闭。齿轮组226上设有导向结构,连杆组件227一端设有导向凸起,导向结构驱动导向凸起做往复移动,导向凸起带动连杆组件227的端部做往复转动,进而可以实现控制阀门321的启动可关闭。作为可变实施例,动力件221也可单独驱动播种器22播种,此时控制阀门321采用单独驱动的电磁阀,此时相当于多增加一个驱动元件,但可以省略掉驱动结构。使用齿轮组226合连杆组件227时,播种机构2和灌溉机构3共用一个电机,电机输出两个动力,一方面用于输出滚筒223的转动,另一方面用来给齿轮主动力,两个角速度相同但直径不同的齿轮转动,从而带动半圆弧所控制的连杆执行往复运动,达到控制阀门321开关,排水灌溉的目的。
41.进一步地,盛种箱21的底部设有大小不同的多个筛料口211,筛料口211处可拆卸地连接有挡料片212,挡料片212适于遮挡筛料口211。盛种箱21的底部设有大小不同的多个筛料口211,筛料口211处可拆卸地连接有挡料片212,挡料片212适于遮挡筛料口211。由于不同种子的大小差别较大,通过设置多个不同的晒料口,可是有效的实现多种不同作物的播种。根据实际需求,筛选其中一个大小合适的晒料口,其余的晒料口用挡料片212进行封堵遮挡。
42.进一步地,智能播种机器人还包括设于安装架1上的挖土机构4,挖土机构4设置在播种机构2的上游位置,挖土机构4包括挖孔钻41和输送组件42,输送组件42驱动挖孔钻41挖孔并将挖出的土壤输送至指定位置。限位开关,
43.具体地,挖孔钻41主要由钻尖、刀片和导土片组成,钻尖起定位作用,刀片用于切土壤,导土片则主要起升土作用。输送组件42包括电机、齿轮、齿条、气缸和滑轨组成。电机动作带动齿轮转动,齿轮转动带动齿条升降,实现挖孔钻41的升降。气缸动作,可以实现挖孔钻41在滑轨上的水平移动,进而将土壤运送至制定位置。作业时挖孔钻41可垂直上下运动,在扭矩和轴向力的作用下切削土壤,切下的松碎土壤沿导土片工作面上升,运到地表后可前后方向上水平移动,随后移动到位后,电机驱动使得导土片反转,土壤便可以散落于指定位置。其中,钻头按导土片和刀片的形状,分螺旋型、叶片型和弯刀型三种,钻头上还可备有钻杆套和防护罩,以防止钻杆被草缠住并起安全保护作用。为使挖孔钻41钻头能自动出土,机上多装有逆转机构。
44.进一步地,挖土机构4还包括设置在安装架1上的限位开关,限位开关适于限定挖孔钻41的下移高度。由于不同作物在播种时有适宜的播种深度,通过限定挖空钻的下移高度,可以实现不同深度的挖孔,使得播种机可以实现多种作物的播种作业,更加智能化。
45.进一步地,智能播种机器人,还包括填土机构5,填土机构5位于挖土机构4的下游,填土机构5包括储土桶51和导土组件52,输送组件42适于将挖出的土壤输送至储土桶51内,导土组件52位于所述储土桶51内,并适于将储土桶51内的土壤从一端的出土口511输送出。
46.具体地,储土桶51即为上述土壤运送的指定位置,即输送组件42将挖出的土壤输送至储土桶51内。储土桶51设置成长条形,一端为面积较大的储土端,另一端设有出土口511,出土口511位于挖孔钻41的下游位置。挖土机构4将挖出的土运送到储土桶51内,然后当播种和灌溉完成后,储土桶51内的土壤再通过输送组件42运送到原处对种子进行覆盖。储土桶51设置成长条形是为了留出一定的距离,进而实现先挖孔、再播种、后填埋的过程。其中导土组件52运用螺旋输送机,由螺旋机体,进料口,驱动装置三部分组成。由挖土机构4挖出的土壤落入螺旋式通道内,电机带动转轴使旋转的螺旋叶片将土壤推移而进行输送,使土壤不与螺旋输送机叶片一起旋转的力是土壤自身重量和螺旋输送机机壳对土壤的摩擦阻力。叶片的面型根据输送土壤的不同有实体面型、带式面型、叶片面型等型式。螺旋输送机的螺旋轴在土壤运动方向的终端有止推轴承以随土壤给螺旋的轴向反力,在机长较长时,应加中间吊挂轴承。
47.进一步地,智能播种机器人还包括行走机构6,行走机构6采用履带式机构,行走机构6位于安装架1的底端并适于驱动整个智能播种机器人移动。
48.具体地,行走机构6上设有安装架1,安装架1可供整机其余部件支撑安装。行走机构6采用履带式机构,履带销将每个履带板连接起来形成一个履带链;履带板两端有与驱动轮啮合的孔,中间有诱导齿,用于调节履带,防止履带转向或滚动时履带脱落。在与地面接触的一侧,还设有加强防滑肋,以提高轨道板的坚固性和轨道与地面的粘合性。行走机构6还包括两个驱动电机61,两个驱动电机61分别与其中一个履带连接,两个驱动电机61分别独立控制。当小车的动力传递给驱动轮时,驱动轮拉动履带,从而在地面履带和地面履带之间产生相互作用。使之移动,两条履带分别由两个独立的电机控制,利用差速进行转弯。
49.本实施例中的智能播种机实施过程如下:
50.准备阶段:在进行播种作业操作前,先检查设备各项性能,确保整机的正常运行,然后根据所播种的种子类别,确定相应尺寸的筛料口211,其余筛料口211用挡料片212进行封口阻挡,然后将盛料箱内盛满待播种的种子,将水箱31装满水,此时准备阶段完成。
51.播种阶段:行走机构6启动由于行走机构6采用的是履带式机构,因此,此智能播种机器人可以在丘陵等不平整的田地进行大规模作业。行走机构6启动后,挖土机构4先启动,对地面进行挖坑作业,然后将挖出的土壤运送到填土机构5。随后播种机构2和灌溉机构3同时作业,对挖好的坑进行播种的同时也进行同步灌溉,随后填土机构5动作,将挖出的土壤填回到坑内,对种子掩埋。由于在播种的过程中,行走机构6都是在缓慢前进的,因此在实际播种的过程中,可以实现沿着一列的方向持续播种,也方便后期的庄稼收割。
52.本具体实施方式的实施例均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1