一种黄桃去核切瓣的主被动并联柔顺装置
1.本发明涉及有核水果加工领域,特别涉及一种黄桃切瓣去核的主被动并联柔顺装置。
背景技术:
2.我国黄桃产量巨大,但黄桃的产地在全国范围内分配不均匀,这对黄桃的保鲜和运输是一个极大的挑战。黄桃罐头,黄桃果脯等黄桃制品虽然可以很好地解决以上问题,但也面临着黄桃加工复杂,以及人工去核切瓣的费时费力,制作成本高等问题。
3.并联结构的工业机器人简称并联机器人,常用于食品加工、包装、搬运等领域。在我国对于并联机器人的研究起步较晚,但经过近几年的发展,并联机器人在我国的应用占比也逐渐提高,这要得益于并联机器人较其他机器人的优点,并联机器人具有刚度大、承载能力强、响应速度快、结构紧凑、无累计误差、容易控制等优点。柔顺机构通过柔性单元传递力与运动,具有无间隙、无摩擦、免润滑等优点,并联机构中增加柔顺单元可以更好地发挥并联机构的性能,组合后的并联柔顺机构能够更好的结合两者的优点,具有较好的力学性能和更高的精度。
技术实现要素:
4.本发明的目的在于提供一种黄桃切瓣去核的装置,以解决目前存在的黄桃产品的加工制造成本高,且费时费力等问题。
5.为解决以上问题本发明的技术方案为:
6.一种黄桃去核切瓣的主被动并联柔顺装置,其包括机架、并联机构、刀具,所述并联机构包括静平台、动平台、主动rpr支链、被动p支链,所述静平台水平布置,通过螺栓连接固定在机架上,所述主动rpr支链通过两端的转动铰链与静平台和动平台进行铰接,所述被动p支链两端通过焊接连接静平台与动平台,所述底部刀具通过三角法兰连接固定于动平台底部。
7.其中所述动平台和静平台平行布置,且动平台与静平台对应的侧平面平行,两平台上的铰链布置成120
°
对称结构,平台上转动铰链的三条转动轴线相交围成一个等边三角形,在三角形的中心处安装被动p支链,被动支链两端与两平台固定连接。
8.其中所述主动支链为rpr结构,转动副r的转动轴线与移动副的移动方向垂直,主动支链与静平台和动平台通过转动铰链进行铰接,主动支链的移动副作为机构的驱动单元,其动力由支链上的步进电机提供。
9.其中述所述被动p支链包括被动可伸缩连杆和套在伸缩连杆外的减振储能弹簧。
10.其中所述所述底部刀具中心为圆筒状的去核刀刃,所述去核刀刃内部设有防堵塞的弹簧挡板,且外壁均匀设有用于切瓣的片状切瓣刀刃,所述弹簧挡板包括滑行杆、套筒、弹簧、静挡板、动挡板。所述滑行杆一端通过螺纹连接固定在动挡板上,另一端设有挡片,所述弹簧两端固定在两挡板上,使得弹簧挡板具有复位功能。
11.其中所述装置的被动储能弹簧可替换成主动线性驱动,而主动驱动支链可换成被动储能弹簧,机构仍为一种主被动并联柔顺装置。
12.其中所述并联机构的p支链如若去除,则可简化为一种主动式并联机构。
13.本发明与现有技术相比具有如下有益效果:
14.本发明的黄桃去核切瓣的主被动并联柔顺装置结构合理,刚度大,实用性高;具有柔顺减震,防堵塞的功能,在保证去核切瓣工作稳定的同时,又可以保护底部刀具不受损伤;同时多支链的并联结构,响应速度快且运行稳定;装置其制造成本低廉,结构简单,可一次将黄桃的肉核分离,同时把果肉进行切瓣,操作简易方便,可实现机械化,具有较好的力学性能和较高的精度。
附图说明
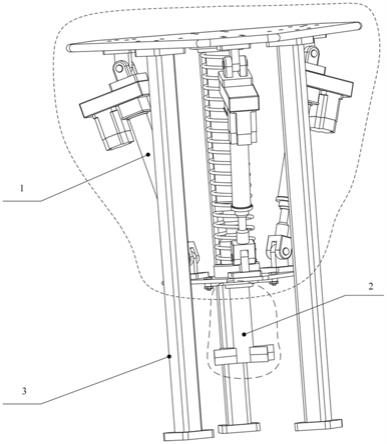
15.图1是本发明的一种黄桃去核切瓣的主被动并联柔顺装置的整体结构示意图;
16.图2是本发明的并联机构的结构示意图;
17.图3是本发明的主动rpr支链的结构示意图;
18.图4是本发明的被动p支链的结构示意图;
19.图5是本发明的刀具的结构示意图;
20.图6是本发明的弹簧挡板的结构示意图;
21.图7是本发明实施例的结构示意图;
22.其中:
23.图1中:1.并联机构;2.刀具;3.机架;
24.图2中:110.主动rpr支链;120.静平台;130.被动p支链;140.动平台;
25.图3中:111、115.转动铰链;112步进电机;113.电驱动伸缩缸;114.电驱动伸缩杆;
26.图4中:131、135.连接台;132.连杆伸缩缸;133.储能弹簧;134.连杆伸缩杆;
27.图5中:201.去核刀刃;202.动挡板;203.切片刀刃;
28.图6中:201.去核刀刃;202.动挡板;204.滑行杆;205.定挡板;206.套筒;207.复位弹簧;
具体实施方式
29.为了能够更好地说明本发明的构成、连接方法、技术方案以及优点,下面将结合附图对本发明做进一步的详述,附图中所给的实施例仅用于说明本发明,但不能限定本发明。
30.图1是本发明提供的一种黄桃去核切瓣的主被动并联柔顺装置的整体结构示意图,其包括机架3、并联机构1、刀具2,所述并联机构1包括静平台120、动平台140、主动rpr支链、被动p支链130,所述静平台120水平布置,通过螺栓连接固定在机架3上,中间被动p支链130连接静平台120与动平台140,三条rpr支链110通过两端的转动铰链与静平台120与动平台140进行连接,底部刀具2通过三角法兰连接固定于动平台140底部;所述静平台120、动平台140、三条主动rpr支链110和被动支链130组成的机构是具有一个自由度的并联柔顺机构,由三条支链110上的步进电动机112同步控制支链推杆114的伸缩带动并联机构的动平台140和底部刀具2作上下竖直运动。
31.图2是本发明的并联机构的结构示意图,所述并联机构由静平台120、动平台140、
连接两平台的三条rpr支链110和被动p支链组成,静平台120与动平台140相互平行,三条主动rpr支链110通过铰链与静平台120与动平台140进行铰连接,布置在静平台120与动平台140上的铰链成120
°
对称结构,平台上转动铰链的三条转动轴线相交围成一个正三角形,在三角形的中心处安装被动p支链130,被动p支链130两端与两平台以焊接的方式进行连接。
32.图3是本发明的主动rpr支链110的结构示意图,所述主动支链110为rpr结构包括两端转动铰链111、115、步进电机112、电驱动伸缩缸113、电驱动伸缩杆114,通过两端的铰链111、115连接静平台120和动平台140,主动支链110两端的运动副为转动副r,中间伸缩杆的运动副为移动副p,三个移动副为装置的驱动单元,其动力由支链上的步进电机112提供。
33.图4是本发明被动p支链130的结构示意图,所述被动p支链包括上连接台131、下连接台135、连杆伸缩缸132、连杆伸缩杆134和储能弹簧133,被动p支链130通过焊接的方式连接静平台120和动平台140,储能弹簧133套在连杆外,两端固定在连杆两端的连接台131、135上,所述被动p支链130连接在静平台120与动平台140间可以起到支撑两平台作用,储能弹簧133除储能外还能够吸收机构的冲击,保护底部刀具2。
34.图5是本发明的刀具2的结构示意图,所述刀具2的中心为圆筒状的去核刀刃201,所述去核刀刃201内部设有防止堵塞的弹簧挡板;所述去核刀刃201外壁均匀设有若干用于切瓣的片状切瓣刀刃203;所述切瓣刀刃203与去核刀刃201采用焊接的连接方式;所述刀具2通过三角法兰固定在动平台140的底部,跟随动平台140作上下垂直运动。
35.图6是本发明的弹簧挡板的结构示意图,所述弹簧挡板包括滑行杆204、套筒206、复位弹簧207、定挡板205、动挡板202;所述滑行杆204一端通过螺纹连接固定在动挡板202上,另一端设有挡片防止在套筒206里脱落;所述套筒206在定挡板205上;所述复位弹簧207套在滑行杆204的外周,夹在动挡板202与定挡板205之间;所述弹簧挡板可以及时的弹出桃核防止刀具2的堵塞。
36.本发明的黄桃去核切瓣的主被动并联柔顺装置,基于一自由度的并联机构,具有结构刚度高,响应速度快,运行稳定等优点,其制造成本低廉,操作简单,只需将物料运输或者放置到特定的位置,步进电机运行,电推杆伸长,动平台向下运动带动刀具下落,可一次将黄桃的肉核分离,果肉进行切瓣,操作简易方便,可实现机械化解放生产力,同时极大地提高生产效率。
37.本装置是用于黄桃去核切瓣的主被动并联柔顺装置,共一个自由度,可在刀具2下合适位置固定底盘单独使用,亦可与物料输送装置例如传送带配合使用,此处以配合传送带装置使用为例进行介绍说明,将本装置机架固定在地面,使得动平台水平悬于传送带上,当黄桃通过特定传送带,到达预定位置时传送带停止转动,三条主动rpr支链110上的推杆114同步伸长,使得动平台140底部连接的刀具2向下快速运动将黄桃进行去核切瓣。之后电推杆114同步进行收缩,刀具2向上运动,在向上运动的过程中,去核刀具201内的,弹簧挡板会把桃核通过传送带的空隙弹出,通过滑槽进入到收集箱中。之后传送带再次运行将已加工好的黄桃通过传送带传递到下一个加工场景,未加工的黄桃通过传送带的运输进行下一轮的循环。
38.以上所述,仅说明了本发明的一个具体实施方式,如相关人员对本发明中的技术方案进行各种组合修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1