一种应用于鞋眼机的传动装置的制作方法
1.本技术涉及鞋眼机领域,尤其是涉及一种应用于鞋眼机的传动装置。
背景技术:
2.鞋的生产过程中,需通过鞋眼机在鞋体材料上冲出鞋眼。
3.相关技术中,鞋眼机包括机架、压脚、升降机构、联动绳、打眼机构以及主电机。联动绳的一端连接在升降机构上,升降机构驱与压脚联动连接,通过拉动、松开联动绳,使得升降机构能够驱动压脚相应下降、上移。打眼机构用于在鞋体材料上冲出鞋眼,主电机用于为打眼机构供能,启动主电机,打眼机构即可运作并于鞋体材料上冲出鞋眼。冲鞋眼时,需先下降压脚,以使压脚抵压在鞋体材料上,从而起到定位作用,然后通过打眼机构冲出鞋眼。
4.在实现本技术过程中,发明人发现该技术中至少存在如下问题:相关技术中,控制主电机通过在机架的台面上设置对应按钮的方式实现,导致冲鞋眼时工作人员不仅需手动安装、取下鞋体材料,还需手动按压、松开按钮,而在控制按钮期间,工作人员的手无法执行其它冲鞋眼相关的加工操作,影响了冲鞋眼的加工效率。
技术实现要素:
5.为了提高冲鞋眼的加工效率,本技术提供一种应用于鞋眼机的传动装置。
6.本技术提供的一种应用于鞋眼机的传动装置采用如下的技术方案:
7.一种应用于鞋眼机的传动装置,包括基座、铰接在基座上的踏板、连接在基座上的安装架、一端铰接在安装架上的摆动块、用于连接摆动块与踏板的联动机构以及安装在安装架上的伺服电机,所述联动机构的两端分别与摆动块以及踏板连接,所述伺服电机的输出轴用于收卷或放出联动绳,所述安装架上设置有用于控制伺服电机的输出轴转动的第一传感器以及用于控制主电机启动的第二传感器,所述第一传感器的感应区域以及第二传感器的感应区域均位于摆动块的转动路径上,所述摆动块能够转动自身移入第一传感器的感应区域或第二传感器的感应区域中。
8.通过采用上述技术方案,冲鞋眼时,工作人员通过将放置鞋体材料,然后通过脚踏的方式踩动踏板,以使踏板发生转动,踏板带动联动机构与踏板连接的端部移动,联动机构带动摆动块与联动机构铰接的端部移动,从而使得摆动块移入第一传感器的感应区域或第二传感器的感应区域。通过相应的踩动踏板的方式,使得摆动块在转动的过程中先移入第一传感器的感应区域,再移入第二传感器的感应区域。摆动块移入第一传感器的感应区域后,伺服电机转动并收卷联动绳,联动绳通过升降机构设置驱动压脚下降,使得摆动块在转动过程中,压脚先下降,然后主电机驱动打眼机构运作打孔。打眼结束后,移动压脚上移,并将打好孔的鞋体材料取下即可。在冲鞋眼的过程中,由于工作人员通过脚踏的方式控制伺服电机以及主电机,此时工作人员能够通过双手去取下一个待冲鞋眼的鞋体材料,提高了冲鞋眼的加工效率。通过伺服电机收卷或放出联动绳,相较于通过工作人员拉动,降低了工
作人员的劳动强度。
9.可选的,所述安装架上还安装有用于控制伺服电机输出轴转动的第三传感器,所述第三传感器控制伺服电机的输出轴转动的方向与第一传感器控制伺服电机的输出轴转动的方向相反,所述第三传感器的感应区域位于摆动块的转动路径上,所述摆动块能够转动至自身移入第三传感器的感应区域中,所述第三传感器的感应区域以及以及第二传感器的感应区域分别位于第一传感器的感应区域的两侧。
10.通过采用上述技术方案,冲鞋眼加工完毕后,通过脚踏的方式踩动踏板以使踏板反向转动,踏板通过联动机构带动摆动块反向转动,以使摆动块移入第三传感器的感应区域。由于第三传感器控制伺服电机转动的方向与第一传感器控制伺服电机转动的方向相反,使得此时伺服电机转动并通过升降机构驱动压脚上移。通过上述结构,使得压脚的上移也可通过脚踏的方式实现,进一步减少了工作人员双手操控的步骤,从而提高了冲鞋眼的加工效率。
11.可选的,所述安装架上设置有弹簧座,所述弹簧座上设置有复位弹簧,所述复位弹簧的两端分别连接在弹簧座以及摆动块上,所述复位弹簧用于驱动摆动块沿第二传感器的感应区域至第一传感器的感应区域的方向转动复位。
12.通过采用上述技术方案,通过踩动踏板以使摆动块转动至自身移入第二传感器的感应区域中时,复位弹簧拉伸,打眼机构完成冲鞋眼加工。撤除施加在踏板上的力后,复位弹簧收缩,从而带动摆动块沿第二传感器的感应区域至第一传感器的感应区域的方向转动复位。将主电机设置为摆动块位于第二传感器的感应区域中方能保持启动状态时,通过复位弹簧,使得冲鞋眼加工结束后,撤除施加在踏板上的力即可实现主电机自动断开,提高应用了本技术传动装置的鞋眼机使用的简便性。
13.可选的,所述摆动块上开设有多个用于供复位弹簧端部勾设的弹簧槽,各所述复位弹簧槽与弹簧座的间距均不同。
14.通过采用上述技术方案,通过将复位弹簧的端部勾设在不同的弹簧槽中,一方面使得同一复位弹簧能够将摆动块复位至不同的初始状态,扩大了本技术传动装置的适配性;另一方面使得不同规格的复位弹簧能够将摆动块复位至同一初始状态,有助于本技术传动装置的生产组装。
15.可选的,所述安装架上还设置有定位机构,所述定位机构包括设置在安装架上的定位座,所述摆动块与定位座抵触时,所述摆动块位于第三传感器的感应区域中。
16.通过采用上述技术方案,定位座起到了定位的作用,使得工作人员即使用力踩动踏板,摆动块仍能够稳定在第三传感器的感应区域中,有助于第三传感器感应,提高了本技术传动装置的控制精度。
17.可选的,所述定位机构还包括缓冲组件,所述缓冲组件包括缓冲弹簧以及用于与摆动块抵触的缓冲推块,所述缓冲推块滑动设置安装架上,所述缓冲弹簧连接在缓冲推块上并用于驱动缓冲推块向靠近摆动块的方向移动,所述缓冲弹簧以及复位弹簧均处于自然状态时,所述缓冲推块与摆动块抵触,且所述摆动块位于第一传感器的感应区域与第三传感器的感应区域之间。
18.通过采用上述技术方案,第一方面,在复位弹簧拉动摆动块转动复位是,缓冲推块起到了缓冲保护的作用;第二方面,在缓冲弹簧以及复位弹簧均处于自然状态时,即踏板不
受力时,摆动块位于第一传感器的感应区域与第三传感器的感应区域之间,此时缓冲组件起到了定位的作用,便于工作人员对踏板进行操控,即通过踩动踏板向不同方向转动,即可实现冲鞋眼或压脚上升。
19.可选的,所述定位座上开设有伸缩槽,所述缓冲弹簧设置在伸缩槽中,所述缓冲推块包括缓冲头以及连接在缓冲头上的缓冲杆,所述缓冲头的截面宽度大于缓冲杆的截面宽度,所述缓冲头设置在伸缩槽中,所述缓冲杆由伸缩槽内贯穿至定位座外,且所述缓冲杆滑动设置在定位座上,所述缓冲头与伸缩槽的槽壁抵触且缓冲杆的端部与摆动块抵触时,所述摆动块位于第一传感器的感应区域与第三传感器的感应区域之间。
20.通过采用上述技术方案,如此设置的缓冲推块以及缓冲弹簧,无需选择比对调整缓冲弹簧以及复位弹簧的弹力,只需选择弹力远大于复位弹簧的缓冲弹簧即可,使得缓冲弹簧处于自然状态时,缓冲头抵紧伸缩槽的槽壁,从而起到了定位的作用。如此设置的缓冲推块,有助于缓冲弹簧以及复位弹簧的选择安装。
21.可选的,所述安装架上设置有定位件,所述定位件位于摆动块的转动路径上,所述摆动块与定位件抵触时,所述摆动块位于第二传感器的感应区域中。
22.通过采用上述技术方案,定位件起到了定位的作用,使得工作人员欲进行冲鞋眼加工时只需将将踏板朝相应的转动方向踩至无法转动即可,此时摆动块位于第二传感器的感应区域中,无需控制踏板转动角度。通过上述角度,提高了本技术传动装置的控制精度以及操控的简便性。
23.可选的,所述联动机构包括多个连接件以及连接两相邻连接件的连接组件,其中一个所述连接件的端部与踏板铰接、另一个所述连接件的端部与摆动块铰接,所述连接组件包括u形块以及紧固螺栓,所述u形块上贯穿有连接孔,相邻两所述连接件的顶端部均插设在连接槽中,所述紧固螺栓连接在u形块上,所述紧固螺栓的端部抵紧相邻的连接件,与所述紧固螺栓抵紧的连接件远离紧固螺栓的一侧抵紧相邻的连接件。
24.通过采用上述技术方案,安装联动机构时,先将其中一个连接件的端部与踏板铰接、另一个连接件的端部与摆动块铰接,然后将两相邻的连接件插入u形块的连接孔中,最后再通过紧固螺栓限制两连接件相对移动。通过如此设置的联动机构,根据踏板与摆动块之间的间距,适当增减连接件以及连接组件,即可实现踏板的转动力长距离传输或是短距离传输,且组装方式简便。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.通过本技术传动装置,使得工作人员能够通过脚踏的方式控制伺服电机以及主电机,从而使得工作人员的双手能够去取下一个待冲鞋眼的鞋体材料, 提高了冲鞋眼的加工效率,通过伺服电机,降低了工作人员的劳动强度;
27.2.通过第三传感器,在完成冲眼加工后,踩动踏板反向转动,以使摆动块移入第三传感器的感应区域,伺服电机以及升降机构驱动压脚上移,进一步减少了工作人员双手操作的步骤;
28.3.通过定位机构以及复位弹簧,一方面对摆动块起到了复位作用,另一方面能够将摆动块定位在第一传感器的感应区域与第三传感器的感应区域之间,便于工作人员对踏板进行操控。
附图说明
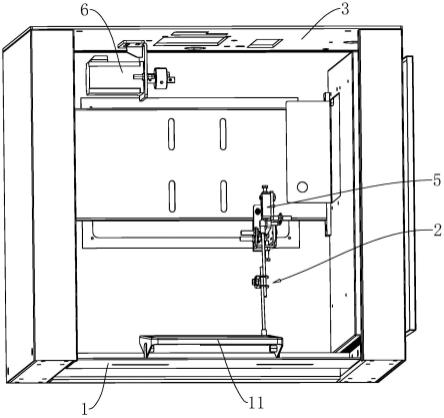
29.图1是本技术实施例的结构示意图。
30.图2是本技术实施例凸显踏板的结构示意图。
31.图3是图2中a处的放大示意图。
32.图4是本技术实施例中凸显定位机构的结构示意图。
33.附图标记说明:
34.1、基座;11、踏板;2、联动机构;21、连接组件;211、u形块;2111、连接孔;212、紧固螺栓;213、紧固螺母;22、连接件;3、安装架;31、第一传感器;32、第二传感器;33、第三传感器;34、弹簧座;35、定位件;36、复位弹簧;4、摆动块;41、弹簧槽;5、定位机构;51、定位座;511、伸缩槽;52、缓冲组件;521、缓冲弹簧;522、固定块;523、缓冲推块;5231、缓冲头;5232、缓冲杆;6、伺服电机。
具体实施方式
35.以下结合附图1-4对本技术作进一步详细说明。
36.本技术实施例公开一种应用于鞋眼机的传动装置。参照图1、图2,应用于鞋眼机的传动装置包括基座1、铰接在基座上的1踏板11、固定在基座上的1安装架3、一端铰接在安装架3上的摆动块4、连接踏板11与摆动块4的联动机构2,安装架3上固定有伺服电机6、第一传感器31、第二传感器32以及第三传感器33,伺服电机6用于收卷或放出联动绳。
37.参照图2、图3,联动机构2包括连接组件21以及两个连接件22,连接组件21包括u形块211、紧固螺栓212以及紧固螺母213。u形块211上贯穿有连接孔2111,两连接件22的端部均插设在连接孔2111中。紧固螺栓212的杆部贯穿并滑动设置在u形块211上,紧固螺栓212的杆部的滑动方向垂直于连接孔2111的延伸方向。紧固螺母213螺纹连接在紧固螺栓212的杆部上,紧固螺母213抵紧u形块211。紧固螺栓212的杆部的端部抵紧相邻的连接件22,与紧固螺栓212抵紧的连接件22远离紧固螺栓212的一侧抵紧另一连接件22。在其他实施方式中,紧固螺栓212还可直接贯穿并螺纹连接在u形块211上。
38.参照图2,其中一个连接件22的端部与踏板11铰接,另一个连接件22的端部与摆动块4的端部铰接,摆动块4与连接件22铰接的端部以及摆动块4与安装架3铰接的端部分别位于摆动块4的两端。连接件22与踏板11的铰接处位于踏板11靠近摆动块4的一端,且连接件22与踏板11的铰接处、基座1与踏板11的铰接处错开。
39.参照图2、图3,踩下踏板11靠近摆动块4的端部时,踏板11通过联动机构2带动摆动块4与连接件22铰接的端部下移。踩下踏板11远离摆动块4的端部时,踏板11通过联动机构2带动摆动块4与连接件22铰接的端部上移。
40.参照图4,第一传感器31、第二传感器32以及第三传感器33均为红外传感器,第一传感器31以及第三传感器33均用于控制伺服电机6的输出轴转动,第一传感器31控制伺服电机6的输出轴转动的方向与第三传感器33控制伺服电机6的输出轴转动的方向相反,第二传感器32用于控制主电机启动。第一传感器31、第二传感器32以及第三传感器33的感应区域均位于摆动块4的转动路径上,摆动块4能够转动至自身移入第一传感器31或第二传感器32或第三传感器33的感应区域中。第三传感器33的感应区域以及第二传感器32的感应区域分别位于第一传感器31的感应区域的两侧。
41.参照图4,安装架3上设置有弹簧座34、定位件35以及定位机构5,弹簧座34固定在安装架3上,弹簧座34上设置有复位弹簧36。摆动块4远离弹簧座34的端面上开设有三个弹簧槽41,各弹簧槽41沿摆动块4长度方向均布,各弹簧槽41与弹簧座34的间距均不同。复位弹簧36的一端套设在弹簧座34上,复位弹簧36的另一端勾设在其中一个弹簧槽41中,复位弹簧36用于驱动摆动块4沿第二传感器32的感应区域至第一传感器31的感应区域的方向转动复位。
42.参照图4,定位机构5包括定位座51以及缓冲组件52,定位座51固定在安装架3上,摆动块4转动至自身与定位座51抵触时,摆动块4位于第三传感器33的感应区域中。缓冲组件52包括缓冲弹簧521、固定块522以及缓冲推块523,定位座51上开设有伸缩槽511,固定块522固定在定位座51上,且固定块522的端部伸入伸缩槽511中。缓冲推块523滑动设置在固定块522上,缓冲推块523包括缓冲头5231以及固定在缓冲头5231上的缓冲杆5232,缓冲头5231的直径大于缓冲杆5232的直径。缓冲头5231位于伸缩槽511中,缓冲杆5232由伸缩槽511内贯穿至定位座51外,缓冲杆5232远离缓冲头5231的端部用于与摆动摆动块4抵触。
43.参照图4,缓冲弹簧521设置在伸缩槽511中,缓冲弹簧521的两端分别抵紧缓冲头5231以及固定块522,缓冲弹簧521用于驱动缓冲推块523向靠近摆动块4的方向移动。缓冲弹簧521以及复位弹簧36均处于自然状态时,缓冲头5231与伸缩槽511的槽壁抵触、缓冲杆5232与摆动块4抵触,且摆动块4位于第一传感器31的感应区域与第三传感器33的感应区域之间。
44.参照图4,定位件35为杆部螺纹连接在安装架3上的螺栓,定位件35位于摆动块4的转动路径上。摆动块4转动至自身与定位件35抵触时,摆动块4位于第二传感器32的感应区域中。
45.本技术实施例一种应用于鞋眼机的传动装置的实施原理为:进行冲鞋眼加工时,工作人员将鞋体材料放置完毕后通过脚踏的方式踩下踏板11靠近摆动块4的端部,踏板11通过联动机构2带动摆动块4转动,直至摆动块4与定位件35抵触。摆动块4在转动的过程中先移入第一传感器31的感应区域,从而使得伺服电机6的输出轴转动,伺服电机6收卷联动绳,联动绳通过升降机构带动压脚下压。然后摆动块4移入第二传感器32的感应区域,主电机启动并通过打眼机构进行冲鞋眼加工。完成冲鞋眼加工后,撤除施加在踏板11上的力,在复位弹簧36的作用下,摆动块4复位至与缓冲杆5232抵触。取下鞋体材料时,通过脚踏的方式踩下踏板11远离摆动块4的端部,踏板11通过联动机构2带动摆动块4转动,直至摆动块4与定位座51抵触,此时摆动块4移至第三传感器33的感应区域,伺服电机6的输出轴转动复位并放出联动绳,升降机构带动压脚上移复位。
46.通过脚踏的方式控制伺服电机6以及主电机,使得工作人员能够通过双手去取下移各待冲鞋眼的鞋体材料,提高了冲鞋眼的加工效率。
47.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1