具有电连接的介入设备的制作方法
1.本发明涉及一种具有传感器互连区域的介入设备。传感器互连区域用于与设置在介入设备上的传感器进行外部电接触。介入设备通常可以在医学领域中使用。预期在各种感测应用中使用各种各样的传感器。在一个示例性应用中,传感器是超声传感器,其可用于跟踪介入设备相对于波束形成超声成像探头的超声场的位置。
背景技术:
2.在医学领域中,介入设备越来越多地包含传感器,以获取关于患者解剖结构内其周围的更多信息。在这方面,例如可以包括压力、温度、流体流量、声音和超声波的传感器。在文献[1]jay mung、francois vignon和ameet jain,“a non
‑
disruptive technology for robust 3d tool tracking for ultrasound
‑
guided interventions”(miccai 2011,第一部分,lncs 6891,第153
–
160页,2011年,a.martel和t.peters(eds.))中更详细描述的一个示例性应用中,超声传感器附接到医学针并且用于跟踪针相对于波束形成超声成像探头的超声场的位置:。
[0003]
此类介入设备面临的一个问题是需要提供与传感器的电接触。
[0004]
在这方面,文献wo2015155671公开了一种连接器,其包括用于连接至医学设备上的传感器接触部的内部导电体。在内部导电体上形成绝缘体。外部导电体形成在绝缘体上并且围绕内部导电体但是与内部导电体电隔离。外部导电体在医学设备上位于内部导电体的相对侧的两个位置处进行接触。
[0005]
另一文献wo 2015/155630 a1涉及一种具有薄膜压电传感器的针。传感器设备包括包含多个层的柔性平面条带。该条带被配置为至少部分地封装医学设备。该条带包括第一电介质层、设置在第一电介质层上的导电屏蔽层、形成在导电屏蔽层上的第二电介质层;以及图案化导电层,其包括传感器电极、集线器电极以及连接传感器电极和集线器电极的迹线。
[0006]
另一文献wo 2017/013224 a1涉及换能器层压件。在电导体和换能器层之间实现电接触。换能器层压件包括两个粘合剂涂覆的箔,其粘合剂涂层被布置为彼此面对。在沿着两个电导体的长度的第一位置处,两个电导体被夹在两个粘合剂涂覆的箔的粘合剂涂层之间,并且换能器层也被夹在两个电导体之间,使得与换能器层上的电极进行电接触。在沿着两个电导体的长度的第二位置处,两个电导体被夹在两个粘合剂涂覆的箔的粘合剂涂层之间,并且没有换能器层被夹在两个电导体之间。
[0007]
不管这一进展,仍然存在提供与设置在介入设备上的传感器的改进的电连接的空间。
技术实现要素:
[0008]
本发明试图提供与设置在介入设备上的传感器的电连接。
[0009]
由此,提供了一种包括传感器互连区域的介入设备,所述传感器互连区域适于与
设置在介入设备上的传感器进行电接触。介入设备包括:导电细长杆,其具有纵轴;以及传感器条带,其包括所述传感器、第一电导体、第二电导体、第一聚合物层、第二聚合物层和电屏蔽层。所述第一电导体、所述第二电导体和所述传感器被设置在所述第一聚合物层和所述第二聚合物层之间并且在所述第一聚合物层的第一侧上。所述电屏蔽层被设置在所述第一聚合物层的第二侧上。所述第一电导体和所述第二电导体与所述传感器电接触并且在包括所述传感器的传感器区域与窗口之间沿着所述传感器条带的长度方向延伸,在所述窗口内,所述第一聚合物层和所述电屏蔽层被移除,以暴露所述第一电导体和所述第二电导体。所述电屏蔽层在所述传感器区域与邻近于所述窗口的电屏蔽接触部分之间沿着所述传感器条带的所述长度方向延伸。所述传感器条带以螺旋的形式被缠绕在所述细长杆周围,使得所述电屏蔽层面向外,并且使得所述第一电导体和所述第二电导体两者在所述窗口内沿着所述纵轴延伸,并且使得邻近于所述窗口的所述电屏蔽接触部分、所述窗口和所述导电细长杆超出被缠绕的传感器条带的暴露部分提供了所述传感器互连区域。
[0010]
窗口内的电导体、被缠绕的传感器条带的电屏蔽接触部分以及导电细长杆因此提供了传感器的电互连区域。有利地,电互连区域的制造相对简单,因为其被提供为螺旋缠绕的传感器条带的结果。此外,螺旋缠绕的传感器条带提供了都在窗口内沿纵轴延伸的第一电导体和第二电导体的暴露部分。在其中电导体同样以螺旋的形式围绕细长杆缠绕的该延伸部简化了电导体与外部配合连接器的对应的接触部的对准,因为沿着纵轴的对准可以通过简单地绕其纵轴旋转细长杆并且从而沿纵轴轴向调节在第一电导体和第二电导体的暴露部分中的每个上的接触点来实现。
[0011]
根据一方面,电屏蔽层包括最靠近传感器区域的远端端部和邻近于窗口的近端端部。近端端部相对于传感器条带的长度方向以锐角倾斜,使得当传感器条缠绕在细长杆周围时,邻近于窗口的电屏蔽层的近端端部位于垂直于细长杆的纵轴的平面内。这样做,当介入设备旋转时,电屏蔽层的邻近于窗口的近端端部不沿着细长杆的纵轴移动。因此,沿着纵轴在固定位置处提供了用于电屏蔽层的参考接触点。因为电屏蔽层提供了旋转不变的接触点,因此这简化了电屏蔽层与外部配合连接器的对应接触部的对准。
[0012]
根据另一方面,传感器条带在最靠近传感器区域的远端端部和最靠近窗口的近端端部之间延伸。传感器条带的近端端部相对于传感器条带的长度方向以锐角倾斜,使得当传感器条带以螺旋的形式围绕细长杆缠绕时,传感器条带的近端端部位于垂直于细长杆的纵轴的平面内。这样做,被缠绕的传感器条带的近端端部在一平面中终止,从而限定了导电细长杆的邻接的暴露部分,其同样在平面中终止并且不会随着介入设备旋转而沿着细长杆的纵轴移动。因此,沿着纵轴在固定位置处提供用于导电细长杆的参考接触点。因为导电细长杆提供了旋转不变的接触点,因此这简化了导电细长杆与外部配合连接器的对应的接触部的对准。
[0013]
根据另一方面,介入设备包括互连基板。互连基板包括第一接触垫、第二接触垫和防护环。第一接触垫和第二接触垫沿着互连轴间隔一间距,以用于与窗口内的第一电导体和第二电导体进行电接触。防护环围绕第一接触垫和第二接触垫,并在接触垫的两侧上沿着互连轴延伸,以将防护环与邻近于窗口的导电屏蔽接触部分和导电细长杆的暴露部分对准。此外,互连轴平行于纵轴布置,使得第一接触垫和第二接触垫分别与窗口内的第一电导体和第二电导体进行电接触,并且使得防护环与邻近于窗口的电屏蔽接触部分和导电细长
杆的暴露部分两者进行电接触。
[0014]
因此,防护环将介入设备的导电细长杆电连接到互连基板上的电屏蔽层。结合电屏蔽层,防护环降低了传感器对电磁干扰,即emi的敏感性。就此而言,甚至已经利用平面防护环实现了足够的emi性能,其消除了用电屏蔽件将互连区域完全可旋转地围绕纵轴的需要。此外,将介入设备的导电细长杆经由防护环连接到互连基板上的电屏蔽层提供了一种实现良好的emi性能的简单的手段,而不必在介入设备本身上进行此类电连接。此外,由于发现由这样的结构提供了足够的电屏蔽,其中,导电细长杆和电屏蔽层经由互连基板的防护环电短路在一起,因此在将互连基板连接到电子电路的线缆中可以使用单个电屏蔽层。在这样的线缆中使用单个电屏蔽层,而不是为导电细长杆和电屏蔽层中的每个使用单个电屏蔽层,减小其重量并提供了增加的柔性。
[0015]
根据另一方面,介入设备包括各向异性导电弹性层。各向异性导电弹性层设置在互连基板和传感器互连区域之间,以用于在第一接触垫与第一电导体之间,在第二接触垫与第二电导体之间,以及在防护环与邻近于窗口的电屏蔽接触部分和导电细长杆超出被缠绕的传感器条带的暴露部分之间,相对于细长轴在径向方向上提供电传导。这样做,通常用于将平面基板附接到平面基板的各向异性导电弹性层此处被用于提供将互连基板附接到传感器互连区域的耐振设备。
[0016]
根据另一方面,传感器是超声传感器,并且提供了包括介入设备的基于超声的位置确定系统。该系统受益于介入设备的前述优点。
[0017]
参考所附权利要求描述了其他方面及其优点。来自所描述的发明的额外优点对于技术人员而言也将是显而易见的。
附图说明
[0018]
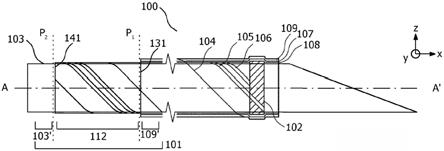
图1图示了介入设备100的截面视图,该介入设备100包括传感器102和用于与传感器进行电接触的传感器互连区域101。
[0019]
图2图示了包括传感器102的传感器条带104的各种视图。
[0020]
图3图示了互连基板350,该互连基板350包括第一接触垫351、第二接触垫352和防护环353。
[0021]
图4图示了包括介入设备100的基于超声的位置确定系统400。
具体实施方式
[0022]
为了说明本发明的原理,特别参考示例性位置跟踪应用来描述医学针形式的介入设备,其中,传感器是用于跟踪介入设备相对于波束形成超声成像探头的超声场的位置的超声传感器。
[0023]
然而,应意识到,介入设备也可以在采用传感器的其他医学应用领域中使用,包括血流感测和测温。因此也预期将本发明与除超声传感器之外的传感器一起使用,包括温度、声音、光学、压力等。此外,本发明还与除医学针以外的其他介入设备一起应用,所述介入设备一般包括但不限于导管、导丝、活检设备、起搏器引线、静脉内线或手术工具。介入设备可用于多种医学流程中,例如从常规的用于区域麻醉的针插入到癌的活检和经皮消融以及更高级的介入流程。
[0024]
图1图示了介入设备100的截面视图,该介入设备100包括传感器102和用于与传感器进行电接触的传感器互连区域101。介入设备100包括具有纵轴a
‑
a’的导电细长杆103,以及传感器条带104,传感器条带104包括传感器102、第一电导体105、第二电导体106、第一聚合物层107、第二聚合物层108和电屏蔽层109。参考图2,其图示了包括传感器102的传感器条带104的各种视图;第一电导体105、第二电导体106和传感器102被设置在第一聚合物层107和第二聚合物层108之间并且在第一聚合物层107的第一侧上。电屏蔽层109被设置在第一聚合物层的第二侧(即相对侧)上。在图2中,在图2a中图示了传感器条带104的平面视图,并且在图2b、2c和2d中分别图示了在b
‑
b’、c
‑
c’和d
‑
d’处穿过传感器条带104的截面。在图2b’和2c’中分别图示了在b
‑
b’和c
‑
c’处穿过传感器条带104的分解截面。尤其是参考图2a和2c,第一电导体105、第二电导体106和传感器102设置在包括传感器102的传感器区域111中的第一聚合物层107和第二聚合物层108之间并且在第一聚合物层107的第一侧。第一侧在图2中位于最下面,并且在缠绕在细长杆103周围时,第一侧相对于第一聚合物层107的相对的第二侧为最内侧。电屏蔽层109设置在第一聚合物层107的第二侧上,即相对侧上。特别是如在图2c中看到的,第一电导体105和第二电导体106与传感器102电接触,并且特别是如在图2a和图2d中看到的,在包括传感器102的传感器区域111和窗口112之间沿着传感器条带的长度方向110延伸,在窗口112内第一聚合物层107和电屏蔽层109被移除以暴露第一电导体105的一部分和第二电导体106的一部分。特别是如在图2a中看到的,电屏蔽层109沿着传感器条带104的长度方向110在传感器区域111与邻近于窗口112的电屏蔽接触部分109’之间延伸。术语邻近于是指邻接或最接近。此外,参考图1,传感器条带104以螺旋的形式缠绕在细长杆103周围,使得电屏蔽层109面向外,并且第一电导体105和第二电导体106两者在窗口112内沿着纵轴a
‑
a’延伸,并且使得邻近于窗口112的电屏蔽接触部分109’、窗口112和导电细长杆103’超出被缠绕的传感器条带的暴露部分提供传感器互连区域101。
[0025]
如上所述,窗口112内的电导体105、106、被缠绕的传感器条带的电屏蔽接触部分109’以及导电细长杆103’的暴露部分因此提供了用于传感器102的电互连区域。有利地,电互连区域101对于制造是相对简单的,因为其提供为螺旋缠绕的传感器条带104的结果。此外,螺旋缠绕的传感器条带104提供了都在窗口112内沿纵轴a
‑
a’延伸的第一电导体105和第二电导体106的暴露部分。由于电导体105、106平行于传感器条带长度方向110延伸,因此该延伸采取螺旋的形式,即如图1所图示的对角线方向。如本文所使用的,术语平行指的是在完全平行的+/
‑
5度内的角度。换句话说,电导体106、106与传感器条带106一样以螺旋的形式缠绕在细长杆103周围。这简化了电导体105、106与外部配合连接器的对应接触部的对准,因为沿纵轴a
‑
a’的对准可以通过简单地使细长杆103绕其纵轴旋转并且从而沿纵轴轴向调节第一电导体和第二电导体的暴露部分中的每个暴露部分上的接触点来实现。
[0026]
导电细长杆103例如可以通常由所图示的医学针或由导管、活检设备、导丝、起搏器引线、静脉内线或手术工具提供。在一些实施方式中,细长杆103可以在垂直于纵轴a
‑
a’的平面内具有圆形横截面。在一些实施方式中,导电细长杆103可以由金属形成,优选地,适合于手术应用的金属,例如但不限于316型不锈钢。
[0027]
传感器102可以选自一系列传感器,包括超声、温度、压力、流量传感器、光学传感器等。在图1和图2中图示了带形式的平面传感器,尽管传感器102的几何结构不限于此。预期使用薄膜、厚膜、微机电结构(即mems)或电容式微机械超声换能器(即cmut)传感器,以及
多个传感器,以及使用多个传感器,即传感器的阵列。这些可以以如图1所图示的带形式,或者以在离散位置中附接的(一个或多个)个体传感器的形式缠绕。在一个实施方式中,传感器102可以是压电传感器,其任选地由均聚物聚偏二氟乙烯(即,pvdf)形成,或者由聚(偏二氟乙烯(vdf)
‑
三氟乙烯(trfe))共聚物形成,或者由锆钛酸铅(即,pzt)形成,并且用于检测超声。
[0028]
电导体105、106可以由包括金、铜、银和铝的一系列材料形成。在一些实施方式中,预期导线形式的导体,并且在其他实施方式中,预期平面材料条带。预期将电导体105、106与传感器102电接触的各种技术,包括压力接触、导线键合,导电粘合剂等。优选地,如图2所图示的,这种接触是压力接触,并且可以包括电极113、114以促进这种接触。电屏蔽层109同样可以由包括金、铜、银和铝的一系列材料制成。
[0029]
传感器条带104中使用的聚合物层107、108可以由一系列聚合物形成,包括但不限于聚对苯二甲酸乙二醇酯、pet、聚酰亚胺、pi或聚酰胺、pa。此外,聚合物层107、108可在它们的表面中的一个或两个上包括粘合剂涂层,任选地压敏粘合剂涂层,这些在图2中被图示为粘合剂层124、125、126、127。粘合剂用于将聚合物层中的每个结合在一起。粘合剂层127可用于将传感器条带104附接到细长杆103。压敏粘合剂是在施加压力后形成粘合剂结合的一类材料。美国3m公司是合适的压敏粘合剂的一个供应商。这些可以供应为psa涂覆的聚合物片材。可以使用在一个或两个表面上具有psa的聚合物层。psa涂覆的聚合物片材通常提供有可移除释放层,将其剥离以揭露粘合剂涂层并且从而保护粘合剂层,直到需要其粘合性能。由聚合物层107、108提供的传感器条带104优选地具有大于其宽度的长度。
[0030]
尤其是参考图2a,电屏蔽层109包括最靠近传感器区域111的远端端部130和邻近于窗口112的近端端部131。任选地,近端端部131可以相对于传感器条带104的长度方向110以锐角α倾斜,使得当传感器条带104围绕细长杆103缠绕时,电绝缘层109的邻近于窗口112的近端端部131位于垂直于细长杆103的纵轴a
‑
a’的平面p1内。
[0031]
参考图2a,这可以通过适当地设置锐角α和传感器条带104的宽度尺寸w来实现。传感器条带104包括第一边缘121和相对的第二边缘122,这些边缘由宽度尺寸w分开。第一边缘121和第二边缘122各自沿着换能器条带104的长度方向110延伸。长度方向110与测量宽度尺寸w的方向正交。传感器条带104可以围绕纵轴a
‑
a’缠绕,其中,电屏蔽层109的近端端部131垂直于细长轴a
‑
a’,以便提供电屏蔽层109的邻近于窗口112的近端端部131位于垂直于细长杆103的纵轴a
‑
a’的平面p1内。缠绕可以使得邻近缠绕匝彼此邻接,刚好交叠或彼此之间具有间隙。为了使螺旋线的连续匝彼此邻接,即恰好触摸,应该满足以下公式:
[0032]
w=π
·
d
·
sin(α)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
公式1
[0033]
其中,α是相对于长度方向110在上面定义的锐角,并且d是圆形横截面细长杆103的直径。通过布置为w超过上述值,螺旋的连续匝彼此交叠。同样,通过布置为w小于该值,可以在螺旋的连续匝之间提供小的间隙。如上所述,通过布置为电屏蔽层109的邻近于窗口112的近端端部131位于垂直于细长杆103的纵轴a
‑
a’的平面p1内,当介入设备100绕纵轴a
‑
a’旋转时,电屏蔽层109的邻近于窗口109的近端端部131不会沿着细长杆103的纵轴(a
‑
a’)移动。因此,沿着纵轴a
‑
a’在固定位置处提供了用于电屏蔽层109的参考接触点。因为电屏蔽层提供了旋转不变的接触点,因此这简化了电屏蔽层与外部配合连接器的对应的接触部的轴向对准。
[0034]
参考图2a和图1,任选地,传感器102可以采取细长条带的形式,其以锐角α跨传感器条带104的宽度尺寸w延伸。这样做,可以以带的形式围绕细长杆103提供传感器。
[0035]
尤其是参考图2a,传感器条带104在最靠近传感器区域111的远端端部140和最靠近窗口112的近端端部141之间延伸。任选地,传感器条带104的近端端部141可以相对于传感器条带104的长度方向110以锐角α倾斜,使得当传感器条带104以螺旋的形式缠绕在细长杆103周围时,传感器条带104的近端端部141位于垂直于细长杆103的纵轴a
‑
a’的平面p2内。
[0036]
如上所述,这样做,被缠绕的传感器条带104的近端端部141在平面p2内终止,从而限定了导电细长杆103的邻接暴露部分,其也在平面p2内终止并且当介入设备100绕纵轴a
‑
a’旋转时不沿着细长杆103的纵轴a
‑
a’移动。因此,在沿纵轴a
‑
a’的固定位置处提供了用于导电细长杆103的参考接触点。因为导电细长杆103提供了旋转不变的接触点,因此这简化了导电细长杆103与外部配合连接器的对应的接触部的轴向对准。
[0037]
在一些实施方式中,介入设备100可以提供有用于与传感器互连区域101进行电接触的互连基板。由此,图3图示了互连基板350,该互连基板350包括第一接触垫351、第二接触垫352和防护环353。任选地,互连基板350可以是平面的。互连基板350可以例如由印刷电路板提供,该印刷电路板具有第一接触垫351、第二接触垫352和设置在其表面之一上的防护环353。参考图3,第一接触垫351和第二接触垫352沿着互连轴e
‑
e’以间距354分开,该间距354适于与窗口112内的第一电导体105和第二电导体106电接触。防护环353设置在互连基板350的表面上并且围绕第一接触垫351和第二接触垫352,并且还沿着互连轴e
‑
e’在接触垫351、352的两侧上延伸,以将防护环353与邻近于窗口112的电屏蔽接触部分109’和导电细长杆103’的暴露部分对准。此外,互连轴e
‑
e’平行于纵轴a
‑
a’布置,使得第一接触垫351和第二接触垫352分别与窗口112内的第一电导体105和第二电导体106电接触,并且使得防护环353与邻近于窗口112的电屏蔽接触部分109’和导电细长杆103’的暴露部分进行电接触。
[0038]
防护环353因此将介入设备100的导电细长杆103电连接到互连基板上的电屏蔽层109。与电屏蔽层109结合,防护环353降低了传感器102对emi的敏感性。已经甚至利用平面的防护环353获得了足够的emi性能,这消除了用电屏蔽件将互连区域101完全可旋转地围绕纵轴a
‑
a’的需要。此外,通过经由防护环353将介入设备102的导电细长杆103连接到互连基板350上的电屏蔽层109,提供了一种用于实现良好emi性能的简单手段,而不必在介入设备100本身上进行此类电连接。
[0039]
任选地,如图3所图示,介入设备100可以包括各向异性导电的弹性层355。合适的层由美国fujipoly销售,为“zebra弹性体连接器”。各向异性导电弹性层355设置在互连基板350与传感器互连区域101之间,以用于在第一接触垫351和第一导电体105之间,第二接触垫352和第二导电体106之间,以及防护环353与邻近于窗口112的电屏蔽接触部分109’和导电细长杆103’超出被缠绕的传感器条带104的暴露部分之间,提供相对于细长轴a
‑
a’的径向方向上的导电。各向异性导电弹性层355也可以任选地借助于在层355中使用导电柱相对于通过细长杆103的横截面相切地提供电隔离。当细长杆103在垂直于纵轴a
‑
a’的平面内具有圆形横截面时,这些布置特别有用。如上所述,这样做,通常用于将平面基板附接到平面基板的各向异性导电弹性层355在此处被用于提供将互连基板350附接到传感器互连区
域101的耐振模块。当传感器互连区域101具有弯曲表面时,例如由圆形横截面细长杆103提供的弯曲表面时,这特别有用。
[0040]
互连基板350可以任选地提供有未图示的电缆。电缆包括第一导线、第二导线和电屏蔽件。电屏蔽件围绕第一导线和第二导线布置以提供电屏蔽。第一导线与第一接触垫351电接触,第二导线与第二接触垫352电接触。电屏蔽件与防护环353电接触。已经发现,通过以下构造提供足够的电屏蔽:其中,导电细长杆103和电屏蔽层109经由互连基板350的防护环353电短路在一起。这允许在将互连基板连接到外部电子电路的线缆中使用单个电屏蔽层。在这样的线缆中使用单个电屏蔽层,而不是为导电细长杆和电屏蔽层中的每个使用单个电屏蔽层,减轻了其重量并提供了增加的柔性。
[0041]
上述介入设备100在医学领域的许多领域中得到应用。现在参考图4描述一个特定的应用,图4图示了基于超声的位置确定系统400,其包括介入设备100。基于超声的位置确定系统400还包括波束形成超声成像探头460、图像重建单元462和位置确定单元463。图4中的传感器102是超声传感器。如上所述的压电传感器或cmut设备是合适的超声传感器的非限制性示例。波束形成超声成像探头460被配置为生成超声场461。图像重建单元462被配置为提供与波束形成超声成像探头460的超声场461相对应的重建超声图像。位置确定单元463被配置为基于在波束形成超声成像探头460和超声传感器102之间传送的超声信号计算介入设备100的超声传感器102相对于超声场461的位置,并基于超声传感器102的计算位置在重建超声图像中提供图标。如图4所图示,还可以包括任选的显示器464、成像系统接口465和成像系统处理器466。各个单元之间的链接图示了它们相应的通信链接。
[0042]
单元460、462、464、465和466一起形成常规超声成像系统。单元462、464、465和466通常位于与波束形成超声成像探头460有线或无线通信的控制台中。单元462、464、465和466中的一些可以备选地并入在波束形成超声成像探头460内,如例如在philips lumify超声成像系统中。波束形成超声成像探头460生成超声场461。在图4中,图示了2d波束形成超声成像探头460,其包括线性超声收发器阵列,该线性超声收发器阵列在超声场461内发射和接收超声能量,该超声场461拦截感兴趣区域roi。超声场在图4中是扇形,并包括多个超声波束b
1..k
,其一起提供所图示的图像平面。注意,尽管图4图示了扇形波束,但是本发明不限于与特定形状的超声场一起使用,或者实际上不限于平面超声场。波束形成超声成像探头460还可以包括未示出的电子驱动器和接收器电路,其被配置为放大和/或调节其发射或接收的信号的相位,以便生成和检测超声波束b
1..k
中的超声信号。
[0043]
在使用中,上述常规超声成像系统以以下方式操作。操作者可以经由成像系统接口465规划超声流程。一旦选择了操作流程,成像系统接口465就触发成像系统处理器466执行专用程序,所述专用程序生成并解释传送到波束形成超声成像探头460并由其检测到的信号。未示出的存储器可以用于存储这样的程序。存储器可以例如存储超声波束控制软件,该超声波束控制软件被配置为控制由波束形成超声成像探头460发射和/或接收的超声信号的序列。图像重建单元462提供与波束形成超声成像探头460的超声场461相对应的重建超声图像。因此,图像重建单元462提供与由超声场461所定义的图像平面相对应的图像,并且其拦截感兴趣区域roi。图像重建单元462的功能可以备选地由成像系统处理器466执行。图像可以随后显示在显示器464上。重建图像可以例如是超声亮度模式“b模式”图像,否则称为“2d模式”图像、“c模式”图像或多普勒模式图像,或者实际上是任何超声图像。
[0044]
在图4中还示出了介入设备100,其以包括超声传感器102的医学针为例。在该示例性应用中,介入设备102或更具体地设置在其上的超声传感器102可以基于由位置确定单元463提供的信号来相对于超声场461跟踪。位置确定单元与单元460、462、464、465和466通信,即与常规超声成像系统通信,如互连链路所图示。位置确定单元463还与超声传感器102通信,该通信可以例如是有线或无线的。位置确定单元463的功能在一些实施方式中可以由常规超声成像系统的处理器来执行。
[0045]
在使用中,超声传感器102的位置由位置确定单元463基于在波束形成超声成像探头460和超声传感器102之间传送的超声信号来相对于超声场461计算。超声传感器102检测与波束b
1..k
相对应的超声信号。位置确定单元463基于i)由超声传感器102检测到的与每个波束b
1..k
相对应的超声信号的幅度,并且基于ii)在每个波束b
1..k
的发射与其由超声传感器102检测到之间的时间延迟(即飞行时间),来识别超声传感器102的位置。位置确定单元463随后基于所计算的超声传感器102的位置在重建超声图像中提供图标。该图标例如可以指示所计算的超声传感器102的位置。该图标还可以任选地指示位置范围,介入设备的一部分,例如它的远端端部可能位于其内。更具体地,通过基于检测到的超声信号找到超声传感器102相对于超声场461的最佳配合位置来计算位置。
[0046]
这可以如下所图示。当超声传感器102在超声场461附近时,从波束b
1..k
中最接近的波束到传感器的超声信号将以相对较大的幅度被检测到,而距离较远的波束将以相对较小的幅度被检测到。通常,以最大幅度检测到的波束被识别为最靠近超声传感器102的波束。该波束定义了波束形成超声成像探头460和超声传感器102之间的平面内角度θ
ipa
。对应的范围取决于在最大幅度波束b
1..k
的发射与其随后检测之间的时间延迟,即飞行时间。因此可以通过将时间延迟乘以超声波传播的速度来确定范围。因此,以最大幅度检测到的波束的范围和对应的平面内角度θ
ipa
可以被用于识别超声传感器102相对于超声场461的最佳配合位置。
[0047]
下面列举了本公开的各种示例:
[0048]
示例1、一种包括传感器互连区域(101)的介入设备(100),所述传感器互连区域用于与被设置在所述介入设备上的传感器(102)进行电接触;所述介入设备包括:
[0049]
导电细长杆(103),其具有纵轴(a
‑
a’);以及
[0050]
传感器条带(104),其包括所述传感器(102)、第一电导体(105)、第二电导体(106)、第一聚合物层(107)、第二聚合物层(108)和电屏蔽层(109);
[0051]
其中,所述第一电导体(105)、所述第二电导体(106)和所述传感器(102)被设置在所述第一聚合物层(107)和所述第二聚合物层(108)之间并且在所述第一聚合物层(107)的第一侧上;并且其中,所述电屏蔽层(109)被设置在所述第一聚合物层(107)的第二侧上;
[0052]
其中,所述第一电导体(105)和所述第二电导体(106)与所述传感器(102)电接触并且在包括所述传感器(102)的传感器区域(111)与窗口(112)之间沿着所述传感器条带的长度方向(110)延伸,在所述窗口内,所述第一聚合物层(107)和所述电屏蔽层(109)被移除,以暴露所述第一电导体(105)和所述第二电导体(106);并且
[0053]
其中,所述电屏蔽层(109)在所述传感器区域(111)与邻近于所述窗口(112)的电屏蔽接触部分(109’)之间沿着所述传感器条带(104)的所述长度方向(110)延伸;并且
[0054]
其中,所述传感器条带(104)以螺旋的形式被缠绕在所述细长杆(103)周围,使得
所述电屏蔽层(109)面向外,并且使得所述第一电导体(105)和所述第二电导体(106)两者在所述窗口(112)内沿着所述纵轴(a
‑
a’)延伸,并且使得邻近于所述窗口(112)的所述电屏蔽接触部分(109’)、所述窗口(112)和所述导电细长杆(103’)超出被缠绕的传感器条带的暴露部分提供了所述传感器互连区域(101)。
[0055]
示例2、根据示例1所述的介入设备(100),所述电屏蔽层(109)包括最靠近所述传感器区域的远端端部(130)和邻近于所述窗口(112)的近端端部(131),其中,所述近端端部(131)相对于所述传感器条带(104)的所述长度方向(110)以锐角(α)倾斜,使得当所述传感器条带被缠绕在所述细长杆(103)周围时,所述电屏蔽层(109)的邻近于所述窗口的所述近端端部(131)位于垂直于所述细长杆(103)的所述纵轴(a
‑
a’)的平面(p1)中。
[0056]
示例3、根据示例1所述的介入设备(100),其中,所述传感器条带(104)在最靠近所述传感器区域(111)的远端端部(140)与最靠近所述窗口(112)的近端端部(141)之间延伸;其中,所述传感器条带的所述近端端部相对于所述传感器条带的长度方向(110)以锐角(α)倾斜,使得当所述传感器条带以螺旋的形式被缠绕在所述细长杆(103)周围时所述传感器条带的所述近端端部(141)位于垂直于所述细长杆(103)的所述纵轴(a
‑
a’)的平面(p2)中。
[0057]
示例4、根据示例1所述的介入设备,还包括互连基板(350),所述互连基板包括:
[0058]
第一接触垫(351);
[0059]
第二接触垫(352);以及
[0060]
防护环(353);
[0061]
其中,所述第一接触垫(351)和所述第二接触垫(352)沿着互连轴(e
–
e’)以间距(354)被间隔开,以与所述窗口(112)内的所述第一电导体(105)和所述第二电导体(106)进行电接触;
[0062]
其中,所述防护环(353)围绕所述第一接触垫(351)和所述第二接触垫(352)并且在所述接触垫(351、352)的两侧沿着所述互连轴(e
–
e’)延伸,以将所述防护环(353)与邻近于所述窗口(112)的所述电屏蔽接触部分(109’)和所述导电细长杆(103’)的所述暴露部分对准;
[0063]
其中,所述互连轴(e
–
e’)被布置为平行于所述纵轴(a
‑
a’),使得所述第一接触垫(351)和所述第二接触垫(352)分别与所述窗口(112)内的所述第一电导体(105)和所述第二导电体(106)进行电接触,并且使得所述防护环(353)与邻近于所述窗口(112)的所述电屏蔽接触部分(109’)和所述导电细长杆(103’)的所述暴露部分进行电接触。
[0064]
示例5、根据示例4所述的介入设备,还包括各向异性导电弹性层(355);
[0065]
其中,所述各向异性导电弹性层(355)被设置在所述互连基板(350)与所述传感器互连区域(101)之间,以用于在所述第一接触垫(351)与所述第一电导体(105)之间,在所述第二接触垫(352)与所述第二电导体(106)之间,并且在所述防护环(353)与邻近于所述窗口(112)的所述电屏蔽接触部分(109’)和所述导电细长杆(103’)超出被缠绕的传感器条带的所述暴露部分之间,在相对于所述细长轴(a
‑
a’)的径向方向上提供电传导。
[0066]
示例6、根据示例4或示例5所述的介入设备,还包括电缆,所述电缆包括第一导线、第二导线和电屏蔽件;并且
[0067]
其中,所述电屏蔽件被布置为围绕所述第一导线和所述第二导线以提供电屏蔽;
[0068]
其中,所述第一导线与所述第一接触垫(351)电接触;
[0069]
其中,所述第二导线与所述第二接触垫(352)电接触;
[0070]
其中,所述电屏蔽件与所述防护环(353)电接触。
[0071]
示例7、根据示例1所述的介入设备,其中,所述传感器(102)是超声传感器。
[0072]
示例8、根据示例1所述的介入设备,其中,所述细长杆(103)由医学针提供。
[0073]
示例9、一种基于超声的位置确定系统(400),包括:
[0074]
根据示例1所述的介入设备(100),其中,所述传感器(102)是超声传感器;
[0075]
波束形成超声成像探头(460),其被配置为生成超声场(461);
[0076]
图像重建单元(462),其被配置为提供与所述波束形成超声成像探头(460)的所述超声场(461)相对应的重建超声图像;
[0077]
位置确定单元(463),其被配置为基于在所述波束形成超声成像探头(460)与所述超声传感器(102)之间传送的超声信号来计算所述介入设备(100)的所述超声传感器(102)相对于所述超声场(461)的位置,并且基于所计算的所述超声传感器(102)的位置在所述重建超声图像中提供图标。
[0078]
尽管以上已经参考了平面超声成像探头,但是应意识到,例示性波束形成超声成像探头460仅是其中可以使用介入设备100的波束形成超声成像探头的一个示例。介入设备100还在包括其他类型的2d或3d波束形成超声成像探头的基于超声的位置确定系统中得到应用。这些可以包括例如“trus”经直肠超声探头、“ivus”血管内超声探头、“tee”经食道探头,“tte”经胸探头,“tne”经鼻探头,“ice”心内探头。此外,应意识到,介入设备100还在医学领域中除位置跟踪之外的其他超声感测应用中得到应用。
[0079]
本文公开的任何方法步骤,特别是关于位置确定单元463的处理器所描述的那些,可以以指令的形式记录,该指令当在处理器上执行时使处理器执行这样的方法步骤。指令可以存储在计算机程序产品上。该计算机程序产品可以由专用硬件以及能够与适当的软件相关联地执行软件的硬件提供。当由处理器提供时,功能可以由单个专用处理器、单个共享处理器或多个个体处理器(其中一些可以共享)提供。此外,术语“处理器”或“控制器”的明确使用不应解释为专门指能够执行软件的硬件,并且可以隐含地包括但不限于数字信号处理器“dsp”硬件、用于存储软件的只读存储器“rom”、随机存取存储器“ram”、非易失性存储等。此外,本发明的实施例可以采用可从计算机可用或计算机可读存储介质访问的计算机程序产品的形式,其提供用于由计算机或任何指令执行系统使用或与之结合使用的程序代码。为了该描述的目的,计算机可用或计算机可读存储介质可以是可以包括、存储、通信、传播或传送程序以用于由指令执行系统、装置或设备使用或与其结合使用的任何装置。介质可以是电子、磁性、光学、电磁、红外或半导体系统或装置或设备或传播介质。计算机可读介质的示例包括半导体或固态存储器、磁带、可移除计算机磁盘、随机存取存储器“ram”、只读存储器“rom”、刚性磁盘和光盘。光盘的当前示例包括压缩盘
–
只读存储器“cd
‑
rom”、压缩盘
–
读/写“cd
‑
r/w”、blu
‑
raytm和dvd。
[0080]
总之,已经提供了一种介入设备,其包括传感器互连区域101,以用于与设置在介入设备上的传感器102进行电接触。介入设备包括导电细长杆、传感器条带104、电导体105、106和电屏蔽层109。电导体105、106在传感器区域111与窗口112之间沿着传感器条带延伸,在窗口112内,电导体105、106被暴露。传感器条带104以螺旋缠绕在细长杆103周围,使得电导体105、106在窗口112内沿着纵轴a
‑
a’延伸,并且使得邻近于窗口112的电屏蔽接触部分
109’、窗口112和导电细长杆103’超出被缠绕的传感器条带的暴露部分提供了传感器互连区域101。
[0081]
已经关于介入设备描述了各种实施例和选择,并且注意,可以将各种实施例组合以实现进一步的有益效果。权利要求中的任何附图标记不应被解释为对本发明的范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1