手术工具的制作方法
手术工具
1.相关申请的交叉引用
2.本国际申请要求2019年10月17在日本专利局提交的日本发明专利申请第2019-190340号的优先权,并且日本发明专利申请第2019-190340号的全部内容通过引用而并入本文。
技术领域
3.本公开涉及用于医疗用机器人的手术工具。
背景技术:
4.近年来,为了减轻手术操作者的负担,并且实现医疗设施的省人力化而提出了使用机器人的医疗处理的方案。在外科领域,提出了一种有关使用具有可供手术操作者远程操作的多自由度臂的多自由度机械手对患者实施处理的医疗用机器人的方案。(例如参照专利文献1。)。
5.专利文献1所记载的技术中公开了一种能够相对于医疗用机器人安装或拆卸用于实施处理的手术工具的结构。并且公开了如下结构:从医疗用机器人向手术工具传递直线运动方向的驱动力,并且驱动力经由在手术工具的内部配置的线材或杆等传递部件而传递给在手术工具的端部配置的把持部等处理部。
6.现有技术文献
7.专利文献
8.专利文献1:日本特开2018-191881号公报
技术实现要素:
9.发明要解决的问题
10.近年来的针对患者实施的处理存在如下倾向:要求实施减小对患者的侵入程度的微创化处理,或要求提高美容性。为了应对这些要求,希望主从式医疗用机器人中的手术工具更加小型化或小径化。
11.另一方面,还要求操作医疗用机器人的手术操作者缩短学习并获取医疗用机器人操作方法的时间,或者使手术工具按照意图稳定顺畅地执行动作。
12.例如,要求基于驱动手术工具的致动器的位置或驱动力等信息来提高对作用在手术工具的外力的大小或方向等进行推定的精度,并将推定出的外力传达给在隔离开的地点进行操作的手术操作者。此外,外力的推定精度与检测外力时的s/n比、对处理部的动作量进行测量时的分辨率有关。其中,在此所述的s/n比也称为信噪比。
13.在此,若手术工具中的如把持部等处理部的尺寸产生变化,即使从医疗用机器人向手术工具传递的驱动力的行程长度相同,处理部的动作量也会产生变化。此外,即使驱动力的大小相同,在处理部产生的力的大小也会产生变化。
14.因此,若安装在医疗用机器人的手术工具的尺寸产生变化,例如,若把持部等处理
部的尺寸产生变化,则上述s/n比或分辨率也会产生变化,从而会对外力的推定精度产生影响。换言之,会产生难以使手术工具按照意图稳定顺畅地执行动作,并且难以抑制外力的推定精度变差的问题。
15.本公开的一个方面优选提供一种能够抑制操作性以及外力的推定精度随着手术工具的尺寸的变化而变差的手术工具。
16.解决问题的技术方案
17.本公开的一个方案涉及一种手术工具,其设置有:从动部,从外部向所述从动部传递用于在直线运动方向上移动的驱动力,由此,所述从动部进行移动;动力传递部,所述动力传递部向实施医疗处理的处理部传递用于在所述直线运动方向上移动的所述驱动力;变换部,所述变换部将所述从动部在所述直线运动方向上的移动量变换并向所述动力传递部传递变换后的移动量;以及主体,所述主体将所述从动部以及所述变换部收纳在所述主体的内部,并且支承所述处理部。
18.根据上述构成,通过设置变换部,能够变换从动部的驱动力的直线运动方向上的移动量的大小并向动力传递部传递变换后的移动量。例如,可以根据处理部等的尺寸来设定通过变换部进行变换的比率。具体而言,处理部的尺寸较小时,设定成使驱动力的移动量缩小的变换比率,当处理部的尺寸较大时,设定成使驱动力的移动量增大的变换比率。
19.因此,即使在处理部等的尺寸产生变化的情况下,也易于保持从外部传递给从动部的移动量与处理部的动作量之间的关系。此外,能够抑制因处理部等的尺寸的变化而导致的s/n比或分辨率的变动,从而能够顺利地控制处理部的动作,并且能够抑制施加给处理部的外力的推定精度变差的情况。
20.其结果为,易于确保使用本公开的一个方案的手术工具的机器人手术的安全性,并易于实现对并发症的抑制。此外,易于提高患者的qol,并易于减轻医生在手术过程中的负担。其中,在此所述的qol是quality of life的简称。而且易于实现对使用本公开的一个方案的手术工具的机器人手术的学习曲线的改善。
21.此外,在本公开的其他方案中,优选设置有连接部,所述连接部配置在所述动力传递部与所述变换部之间,并将从所述变换部传递的驱动力传递给所述动力传递部。
22.如上所述,通过设置连接部,与向动力传递部直接传递驱动力的情况相比,易于从变换部向动力传递部传递驱动力。而且,易于将直线运动方向上的移动量的变换设定成预定的变换量。
23.在上述构成中,所述变换部优选形成为长条形状,优选所述长条形状中的第1端部被支承为能够相对于所述从动部转动,优选所述长条形状中的第2端部被支承为能够相对于支承所述变换部的支承部转动,所述连接部优选以能够转动的方式被支承在所述变换部中的所述第1端部与所述第2端部之间。
24.通过如上所述地设定变换部的形状,而易于进行以预定的变换率缩小直线运动方向上的移动量的设定。即,通过改变以下两个距离的比率而能够改变直线运动方向上的移动量的变换率,其中,所述两个距离为:从被支承为能够相对于从动部转动的位置到被支承为使得连接部能够转动的位置的距离、以及从被支承为能够相对于支承部转动的位置到被支承为使得连接部能够转动的位置的距离。
25.在上述构成中,所述变换部优选形成为长条形状,优选所述长条形状中的第1端部
被支承为能够相对于所述从动部转动,优选所述长条形状中的第2端部被支承为能够相对于所述连接部转动,优选所述变换部中的位于所述第1端部与所述第2端部之间的部分被支承为能够相对于支承所述变换部的支承部转动。
26.通过如上所述地设定变换部的形状,而易于进行以预定的变换率缩小或增大直线运动方向上的移动量的设定。即,通过改变以下两个距离的比率而能够改变直线运动方向上的移动量的变换率,其中,所述两个距离为:从被支承为能够相对于从动部转动的位置到被支承为能够相对于支承部转动的位置的距离、以及从被支承为能够相对于连接部转动的位置到被支承为能够相对于支承部转动的位置的距离。
27.在上述构成中,优选所述变换部中的第1距离大于所述变换部中的第2距离,其中,所述第1距离是所述变换部中的从被支承为能够相对于所述从动部转动的位置到被支承为使得所述支承部能够相对于所述变换部转动的位置的距离,所述第2距离是所述变换部中的从被支承为能够相对于所述连接部转动的位置到被支承为使得所述支承部能够相对于所述变换部转动的位置的距离。
28.如上所述,通过使变换部中的第1距离大于第2距离,而能够将从动部在直线运动方向上的移动量变小,并将其传递给动力传递部。并且驱动力的力的大小被变大而被传递给动力传递部。
29.在上述构成中,优选所述变换部中的第1距离小于所述变换部中的第2距离,其中,所述第1距离是所述变换部中的从被支承为能够相对于所述从动部转动的位置到被支承为使得所述支承部能够相对于所述变换部转动的位置的距离,所述第2距离是所述变换部中的从被支承为能够相对于所述连接部转动的位置到被支承为使得所述支承部能够相对于所述变换部转动的位置的距离。
30.如上所述,通过使变换部中的第1距离小于第2距离,而能够将从动部在直线运动方向上的移动量变大,并将其传递给动力传递部。并且驱动力的力的大小被变小而被传递给动力传递部。
31.发明的效果
32.根据本公开的手术工具,通过设置变换部,从动部的驱动力的直线运动方向上的移动量的大小被变换,而向动力传递部传递,由此实现如下效果:能够抑制操作性以及外力的推定精度随着手术工具的尺寸的变化而变差的情况。
附图说明
33.图1是说明本公开的第1实施方式的手术工具的整体结构的图。
34.图2是说明图1的手术工具的主体的装卸面的结构的图。
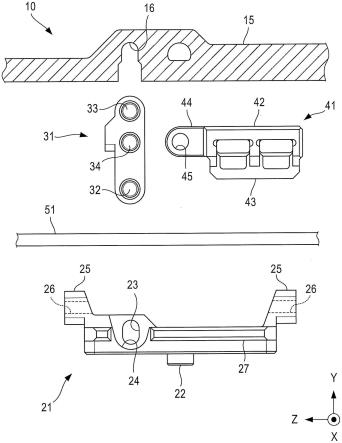
35.图3是说明从动部、连接部、变换部以及动力传递部的结构的图。
36.图4是说明图3的从动部、连接部、变换部以及动力传递部的结构的立体图。
37.图5是说明图3的连接部的结构的图。
38.图6是说明通过图3的从动部、连接部、变换部以及动力传递部传递驱动力的图。
39.图7是说明通过图3的从动部、连接部、变换部以及动力传递部传递驱动力的另一附图。
40.图8是说明本公开的第2实施方式的手术工具的从动部、连接部、变换部以及动力
传递部的结构的图。
41.图9是说明图8的连接部的结构的图。
42.附图标记的说明
43.1、101
…
手术工具;10
…
主体;21、121
…
从动部;31、131
…
变换部;51
…
动力传递部;70
…
钳子(处理部);d21
…
第1距离;d22
…
第2距离
具体实施方式
44.〔第1实施方式〕
45.以下参照图1~图7对本公开的第1实施方式的手术工具1进行说明。本实施方式的手术工具1用于主从式手术机器人。在本实施方式中,设置在从主体10延伸的轴60的前端处的末端执行器为钳子70。
46.如图1以及图2所示,在手术工具1设置有主体10、轴60以及钳子70,其中,主体10的内部具有收纳空间,轴60从主体10呈棒状延伸,钳子70配置在轴60中的位于主体10相反侧的端部。此外,钳子70对应于作为处理部的构成的一例。
47.此外,在本实施方式中,为了易于说明,将轴60的轴线l的方向设为z轴,并将从主体10趋向钳子70的方向设为z轴正方向而加以说明。并且,将与z轴正交且与图1的纸面平行的方向设为x轴,并将朝向z轴正方向时的右侧方向设为x轴正方向而加以说明。将与x轴以及z轴正交的方向设为y轴,并将从图1的纸面趋向近前的方向设为y轴正方向而加以说明。
48.主体10是手术工具1中的相对于主从式手术机器人被安装或拆卸的部分,并且主体10还是支承轴60的部分。如图2所示,主体10中的装卸面11设置有从动槽12,其中,装卸面11是主体10中的相对于手术机器人进行安装或拆卸的面,从动槽12是在z轴方向上延伸的长孔。在本实施方式中,位于y轴负方向一侧的面是装卸面11。
49.后述从动部21以能够相对于主体10沿z轴方向进行相对直线运动的方式配置在从动槽12。在本实施方式中,三个从动槽12在x轴方向上空开间隔地排列配置。此外,三个从动槽12在z轴方向上的长度可以相同,也可以是两个从动槽12在z轴方向上的长度相同,而另一个不同,还可以是三个从动槽12在z轴方向上的长度全不相同。并且,设置在主体10的从动槽12的数量可以大于三个,也可以小于三个。
50.如图3以及图4所示,主体10的内部具备:在用于驱动钳子70等的驱动力的传递中所使用的从动部21、变换部31、连接部41、以及动力传递部51。
51.驱动钳子70等的驱动力从手术机器人传递给从动部21。如图2所示,从动部21配置成,能够按照从手术机器人传递的驱动力而在从动槽12的内部沿z轴方向进行直线运动(参照。)。
52.在从动部21设置有突出部22、从动孔部23、导引部25以及滑动引导部27。
53.突出部22是从从动部21朝y轴负方向突出的呈柱状的部分,当从动部21被配置到从动槽12中时,突出部22是比装卸面11朝y轴负方向突出的部分。突出部22与手术机器人的设置在传递驱动力的构件处的凹部卡合,通过该卡合,向从动部21传递用于在z轴方向上直线运动的驱动力。
54.如图3所示,从动孔部23以可供变换部31进行转动的方式与变换部31连接。从动孔部23是供变换部31的从动轴部32插通的沿x轴方向延伸的通孔。从动孔部23的截面,换言
之,以与x轴正交的面将从动孔部23切断后的截面具有呈椭圆形的形状,该椭圆形具有沿y轴方向延伸的长轴。此外,从动部21的从动孔部23的周围可以形成有容许变换部31转动的切口部24。
55.如图3以及图4所示,导引部25是具有供动力传递部51插通的通孔26的部分。通孔26与动力传递部51之间形成有间隙,从动部21和动力传递部51能够沿着z轴方向进行相对移动。在本实施方式中,从动部21在z轴正方向的端部以及在z轴负方向的端部设置有朝y轴正方向突出的导引部25。
56.滑动引导部27具有从从动部21朝x轴正方向以及负方向突出且沿z轴方向延伸的呈垄状的形状。滑动引导部27与设置在从动槽12的沿z轴方向延伸的槽或者台阶形状卡合,从而进行引导以使得从动部21沿着从动槽12移动。
57.变换部31构成将传递到从动部21的驱动力传递给连接部41的连杆机构或杠杆机构。包含本实施方式的变换部31的连杆机构或杠杆机构将从动部21在z轴方向即直线运动方向上的移动量缩小而传递给连接部41,并且将从动部21的驱动力的大小增大而传递给连接部41。
58.变换部31是至少沿y轴方向延伸的形成为长条状的部件。变换部31的处在y轴负方向一侧的端部,换言之,处在从动部21侧的端部设置有沿x轴方向延伸的圆柱状的从动轴部32。变换部31的处在y轴正方向一侧的端部设置有支承变换部31且沿x轴方向延伸的圆柱状的支承轴部33。在变换部31,在从动轴部32与支承轴部33之间设置有沿x轴方向延伸的圆柱状的连接轴部34。
59.变换部31的处在从动部21侧的端部具有在x轴方向上空开间隔且朝y轴负方向延伸的分叉成两股的形状。从动部21中的设置有从动孔部23以及切口部24的部分配置在该分叉成两股的端部之间。变换部31中设置有连接轴部34的区域处设置有凹部,该凹部是供连接部41的局部配置的部分,并且朝z轴负方向开口。
60.如图5所示,变换部31中的从支承轴部33的中心到连接轴部34的中心的距离为第1距离d11。并且变换部31中的从从动轴部32的中心到连接轴部34的中心的距离为第2距离d12。
61.如图4所示,支承轴部33以比变换部31朝x轴正方向以及负方向突出的方式而配置。如图3所示,支承轴部33配置在主体10所包含的支承部15的支承槽16中。支承槽16是在y轴负方向的一侧具有开口且沿x轴方向延伸的槽。
62.如图3以及图4所示,连接部41将从变换部31传递的驱动力传递给动力传递部51。此外,连接部41设置有第1连接部42、第2连接部43、以及固定部44。
63.第1连接部42以及第2连接部43还是将动力传递部51夹在该两者之间而进行固定的部位。固定部44是使第1连接部42和第2连接部43一体化的部件,在本实施方式中,固定部44是螺钉。此外,固定部44可以是如上所述的螺钉,还可以是其他用于固定的结构。
64.在第1连接部42设置有凸部45,凸部45插入到在变换部31的设置有连接轴部34的区域处设置的凹部中。凸部45设置有连接孔部46,连接孔部46是沿x轴方向延伸的通孔。变换部31的连接轴部34以能够转动的方式插入到连接孔部46中。
65.动力传递部51将从连接部41传递的驱动力传递给钳子70。动力传递部51以从主体10的内部起经由轴60的内部并延伸到钳子70的方式而配置。
66.在本实施方式中,动力传递部51是索状体的线材。此外,动力传递部51可以整体由线材形成,也可以由形成为圆柱状或圆筒状的一部分杆和线材组合而成,其详细结构没有限定。
67.如图1所示,轴60是从主体10沿z轴方向延伸配置且形成为筒状的部件。轴60中处在z轴正方向的端部配置有钳子70。此外,轴60中的位于钳子70附近处设置有关节部61。
68.关节部61具有能够改变钳子70的朝向的结构,并具有能够以x轴方向以及y轴方向作为转动轴线进行转动的结构。关节部61例如具有通过由动力传递部51传递的驱动力而进行转动的结构。此外,关节部61的结构没有特别限定。
69.钳子70配置在轴60的处在z轴正方向的端部。钳子70具有通过由动力传递部51传递的驱动力而进行开闭的结构。钳子70进行开闭的结构没有特别限定。
70.接下来,参照图6以及图7对具备上述结构的手术工具1的动作进行说明。首先,参照图6说明从动部21朝z轴正方向移动时的动作,然后,参照图7说明从动部21朝z轴负方向移动时的动作。
71.如图6所示,若从动部21通过从手术机器人传递的驱动力而朝z轴正方向进行直线运动,则从动部21的动作被传递给变换部31。具体而言,变换部31以支承轴部33为中心并且以使得位于从动部21侧的端部朝z轴正方向移动的方式进行转动。变换部31的从动轴部32因转动而朝y轴正方向的移动的移动量被从动部21的从动孔部23吸收。
72.若变换部31进行转动,则变换部31的动作被传递给连接部41以及动力传递部51。具体而言,变换部31的转动经由变换部31的连接轴部34以及连接部41的连接孔部46被转换成连接部41以及动力传递部51朝z轴正方向的移动而传递给连接部41以及动力传递部51。
73.此时,连接部41以及动力传递部51朝z轴正方向的移动量减少到如下值,即,用从动部21朝z轴正方向的移动量乘以d11所得的值再除以d11+d12后所得的值。此外,朝z轴正方向对连接部41以及动力传递部51作用的驱动力的大小增大到如下值,即,用朝z轴正方向对从动部21作用的驱动力的大小乘以d11+d12所得的值再除以d11后所得的值。
74.如图7所示,若从动部21通过从手术机器人传递的驱动力而朝z轴负方向进行直线运动,则变换部31以支承轴部33为中心并且以使得位于从动部21侧的端部朝z轴负方向移动的方式进行转动。变换部31的转动经由变换部31的连接轴部34以及连接部41的连接孔部46被转换成连接部41以及动力传递部51朝z轴负方向的移动而传递给连接部41以及动力传递部51。
75.此时的连接部41以及动力传递部51朝z轴负方向的移动量以及朝负方向对连接部41以及动力传递部51作用的驱动力的大小的变化与图6示出的情况相同,因此对其省略详细的说明。
76.根据上述构成的手术工具1,通过设置变换部31,能够变换从动部21在直线运动方向上的移动量的大小并向动力传递部51传递变换后的移动量。例如,可以根据钳子70等的尺寸来设定通过变换部31进行变换的比率。具体而言,根据钳子70的尺寸变小的程度,而设定成使从从动部21向动力传递部51传递的移动量变小的变换比率。
77.因此,即使在钳子70等的尺寸产生变化的情况下,也易于保持从手术机器人传递给从动部21的移动量与钳子70的动作量之间的关系。此外,在手术机器人设置有用于检测施加给钳子70的外力的传感器或用于检测钳子70的驱动量的编码器等传感器的情况下,能
够抑制因钳子70等的尺寸的变化而导致的s/n比或分辨率的变动,从而能够顺利地控制钳子70的动作,并且能够抑制施加给钳子70的外力的推定精度变差的情况。
78.其结果为,易于确保使用本实施方式的手术工具1的机器人手术的安全性,并易于实现对并发症的抑制。此外,易于提高患者的qol(quality of life),并易于减轻医生在手术过程中的负担。而且易于实现对使用本实施方式的手术工具1的机器人手术的学习曲线的改善。
79.通过设置连接部41,与从变换部31向动力传递部51直接传递驱动力的情况相比,易于向动力传递部51传递驱动力。而且,易于将直线运动方向上的移动量的变换设定成预定的变换量。
80.通过以本实施方式所述的方式设定变换部31的形状,而易于以预定的变换率缩小直线运动方向上的移动量。即,通过改变第1距离d11和第2距离d12的比率而能够改变直线运动方向上的移动量的变换率,其中,第1距离d11是变换部31中的从被支承为能够相对于支承部15转动的位置到被支承为使得连接部41能够相对于变换部31转动的位置的距离;第2距离d12是变换部31中的从被支承为能够相对于从动部21转动的位置到被支承为使得连接部41能够相对于变换部31转动的位置的距离。
81.〔第2实施方式〕
82.接下来,参照图8以及图9对本公开的第2实施方式的手术工具进行说明。本实施方式的手术工具的基本结构与第1实施方式相同,不过,变换部及其周边结构不同于第1实施方式。因此,本实施方式参照图8以及图9对变换部及其周边结构进行说明,并省略其他结构的说明。
83.如图8所示,本实施方式的手术工具101的主体10设置有从动部121、变换部131、连接部141、以及动力传递部51。与第1实施方式的不同之处在于,在本实施方式中,连接部141配置在变换部131的位于y轴正方向的端部。
84.从动部121设置有突出部22、从动孔部23、以及滑动引导部27。此外,从动部121形成有切口部24。此外,在本实施方式中,从动部121未设置导引部25。不过,不限定于从动部121不设置导引部25的结构,从动部121也可以设置导引部25。
85.变换部131构成将传递到从动部121的驱动力传递给连接部141的连杆机构或杠杆机构。包含本实施方式的变换部131的连杆机构或杠杆机构将从动部121在z轴方向即直线运动方向上的移动量缩小或扩大而传递给连接部141,并且将从动部121的驱动力的大小增大或减小而传递给连接部141。
86.变换部131是至少沿y轴方向延伸的形成为长条状的部件。变换部131的处在y轴负方向一侧的端部,换言之,处在从动部121侧的端部设置有沿x轴方向延伸的圆柱状的从动轴部32。变换部131的处在y轴正方向一侧的端部设置有沿x轴方向延伸的圆柱状的连接轴部34。
87.在变换部131中,在从动轴部32与连接轴部34之间设置有支承变换部131且沿x轴方向延伸的圆柱状的支承轴部133。支承轴部133被保持为能够相对于主体10的支承部15进行转动。
88.如图9所示,变换部131中的从从动轴部32的中心到支承轴部133的中心的距离为第1距离d21。并且变换部131中的从支承轴部133的中心到连接轴部134的中心的距离为第2
距离d22。
89.如图8所示,连接部141将从变换部131传递的驱动力传递给动力传递部51。对比于第1实施方式的连接部41,连接部141仅在以能够转动的方式与变换部131的连接轴部34连接这一点上有所不同,其他结构均与第1实施方式相同,因此省略详细的说明。
90.接下来,参照图8对具备上述结构的手术工具101的动作进行说明。
91.若从动部121通过从手术机器人传递的驱动力而朝z轴正方向进行直线运动,则从动部121的动作被传递给变换部131。具体而言,变换部131以支承轴部133为中心并且以使得位于从动部121侧的端部朝z轴正方向移动的方式进行转动。
92.若变换部131进行转动,则变换部131的动作被传递给连接部141以及动力传递部51。具体而言,变换部131的转动被转换成连接部141以及动力传递部51朝z轴负方向的移动而传递给连接部141以及动力传递部51。
93.此时,连接部141以及动力传递部51朝z轴负方向的移动量的绝对值为如下值,即,用从动部121朝z轴正方向的移动量的绝对值乘以d22所得的值再除以d21后所得的值。此外,朝z轴正方向对连接部41以及动力传递部51作用的驱动力的大小为如下值,即,用朝z轴正方向对从动部21作用的驱动力的大小乘以d21所得的值再除以d22后所得的值。
94.在此,当第1距离d21>第2距离d22时,连接部141以及动力传递部51朝z轴负方向的移动量的绝对值小于从动部121朝z轴正方向的移动量的绝对值。朝z轴正方向对连接部41以及动力传递部51作用的驱动力的大小大于朝z轴正方向对从动部21作用的驱动力的大小。
95.当第1距离d21<第2距离d22时,连接部141以及动力传递部51朝z轴负方向的移动量的绝对值大于从动部121朝z轴正方向的移动量的绝对值。朝z轴正方向对连接部41以及动力传递部51作用的驱动力的大小小于朝z轴正方向对从动部21作用的驱动力的大小。
96.从动部121通过从手术机器人传递的驱动力而朝z轴负方向进行直线运动时,变换部131、连接部141以及动力传递部51的动作与上述的动作呈相反的方向,因此对其省略详细的说明。此外,连接部141以及动力传递部51在z轴方向上的移动量以及驱动力的大小的变化也与上述相同,因此对其省略详细的说明。
97.根据上述构成,通过以本实施方式所述的方式设定变换部131的形状,而易于进行以预定的变换率缩小或增大直线运动方向上的移动量的设定。即,通过改变第1距离d21和第2距离d22的比率而能够改变直线运动方向上的移动量的变换率,其中,第1距离d21是变换部131中的从被支承为能够相对于从动部121转动的位置到被支承为能够相对于支承部15转动的位置的距离,第2距离d22是变换部131中的从被支承为能够相对于连接部141转动的位置到被支承为能够相对于支承部15转动的位置的距离。
98.通过使变换部131中的第1距离d21大于第2距离d22,而能够将从动部121在直线运动方向上的移动量变小,并将其传递给动力传递部51。并且驱动力的力的大小被变大而被传递给动力传递部51。
99.通过使变换部131中的第1距离d21小于第2距离d22,而能够将从动部121在直线运动方向上的移动量变大,并将其传递给动力传递部51。并且驱动力的力的大小被变小而被传递给动力传递部51。
100.此外,本公开的技术范围不限于上述实施方式,在不脱离本公开的主旨的范围内
能够施加各种变更。例如在上述实施方式中,在轴60的前端设置的末端执行器为钳子70。不过,末端执行器不限于钳子70,也可以是在内窥镜手术等中使用的其他器械。
101.此外,变换部31、131的具体形状不限于上述实施方式示出的形状,可以使用具有达到同样效果的形状的变换部,无特别限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1