用于控制氧气浓缩器的方法和设备与流程
用于控制氧气浓缩器的方法和设备
1.相关申请的交叉引用
2.本公开要求于2019年11月7日提交的美国临时专利申请序列第62/932,125号的优先权,其全部公开内容在此引入作为参考。
技术领域
3.本技术总体上涉及用于治疗呼吸障碍的方法和设备,例如涉及气体吸附或受控压力和/或真空变压吸附的那些。这种方法可以在使用一个或多个筛床的氧气浓缩器中实施。在一些示例中,本技术更具体地涉及用于具有脉冲式氧气输送或需求模式的便携式氧气浓缩器的这种方法和设备,以便调节输送的气体(例如富氧空气)的量或所需的团尺寸。
背景技术:
4.人类呼吸系统及其疾病
5.人体的呼吸系统促进气体交换。鼻和嘴形成患者的气道入口。
6.气道包括一系列分支管,当分支气管穿透更深入肺部时,其变得更窄、更短且更多。肺的主要功能是气体交换,允许氧气从吸入的空气移动到静脉血中并且允许二氧化碳在相反的方向上移动。气管分为左和右主支气管,其最终再分成末端细支气管。支气管构成传导气道,但是并不参与气体交换。气道的进一步分支通向呼吸细支气管,并最终通向肺泡。肺的肺泡区域为发生气体交换的区域,且称为呼吸区。参见2012年由john b.west,lippincott williams&wilkins出版的《呼吸系统生理学(respiratory physiology)》,第9版。
7.存在一系列呼吸疾病。呼吸障碍的示例包括呼吸衰竭,肥胖换气过度综合征(ohs)、慢性阻塞性肺病(copd)、神经肌肉疾病(nmd)和胸壁障碍。
8.呼吸衰竭是呼吸疾病的涵盖性术语,其中肺不能吸入足够的氧气或呼出足够的co2以满足患者的需要。呼吸衰竭可涵盖以下疾病中的一些或全部。
9.患有呼吸功能不全(一种形式的呼吸衰竭)的患者在锻炼时可能经历异常的呼吸短促。
10.肥胖换气过度综合征(ohs)被定义为严重肥胖和清醒时慢性高碳酸血症的组合,不存在其他已知的换气不足的原因。症状包括呼吸困难、晨起头痛和白天过度嗜睡。
11.慢性阻塞性肺疾病(copd)涵盖具有某些共同特征的一组下气道疾病中的任何一种。这些包括空气移动阻力增加、呼吸的呼气阶段延长,以及肺的正常弹性损失。copd的示例为肺气肿和慢性支气管炎。copd由慢性吸烟(主要风险因素)、职业暴露、空气污染和遗传因素引起。症状包括:劳力性呼吸困难、慢性咳嗽和产生痰液。
12.神经肌肉疾病(nmd)是广泛的术语,其涵盖直接通过内在肌肉病理学或间接通过神经病理学损害肌肉功能的许多疾病和病痛。一些nmd患者的特征在于进行性肌肉损伤,其导致行走能力丧失、乘坐轮椅、吞咽困难、呼吸肌无力,并最终死于呼吸衰竭。神经肌肉疾病可分为快速进行性和缓慢进行性:(i)快速进行性疾病:特征在于肌肉损伤历经数月恶化,
且在几年内导致死亡(例如,青少年中的肌萎缩性侧索硬化(als)和杜氏肌肉营养不良症(dmd);(ii)可变或缓慢进行性疾病:特征在于肌肉损伤历经数年恶化,且仅轻微缩短预期寿命(例如,肢带型、面肩肱型和强直性肌肉营养不良症)。nmd的呼吸衰竭的症状包括:渐增的全身虚弱、吞咽困难、运动中和休息时呼吸困难、疲惫、嗜睡、晨起头痛,以及注意力难以集中和情绪变化。
13.胸壁疾病是一组导致呼吸肌与胸廓之间低效联接的胸廓畸形。这些疾病通常特征在于限制性缺陷,并且具有长期高碳酸血症性呼吸衰竭的可能。脊柱侧凸和/或脊柱后侧凸可引起严重的呼吸衰竭。呼吸衰竭的症状包括:运动中呼吸困难、外周水肿、端坐呼吸、反复胸部感染、晨起头痛、疲惫、睡眠质量差以及食欲不振。
14.治疗
15.已经使用各种呼吸疗法来治疗上述呼吸障碍中的一种或多种。
16.呼吸压力治疗
17.呼吸压力治疗是以受控目标压力将空气供应到气道入口的应用,所述受控目标压力在患者的整个呼吸循环中相对于大气名义上是正的(与诸如罐式呼吸机或胸甲的负压治疗相反)。
18.无创通气(niv)通过上气道向患者提供通气支持,以通过进行呼吸功的一些或全部来辅助患者呼吸和/或维持体内足够的氧水平。通气支持经由无创患者接口提供。niv已用于治疗呼吸衰竭,如ohs、copd、nmd和胸壁疾病形式。在一些形式中,可以改善这些治疗的舒适性和有效性。
19.无创通气(iv)为不能够自己有效呼吸的患者提供通气支持,并且可以使用气切管提供。在一些形式中,可以改善这些治疗的舒适性和有效性。
20.流动治疗
21.并非所有呼吸治疗都旨在输送规定的治疗压力。一些呼吸治疗旨在通过在目标持续时间内输送吸气流量分布(可能叠加在正基线压力上)来输送规定的呼吸量。在其他情况下,到患者气道的接口是“开放的”(未密封的)并且呼吸治疗可以仅向患者自身的自主呼吸补充经调节或富集的空气流。在一个示例中,高流量治疗(hft)是通过未密封或打开的患者接口以在整个呼吸循环中保持大致恒定的“治疗流量”向气道的入口提供连续的、加热的、加湿的空气流。治疗流量标称设定为超过患者的峰值吸气流量。hft已经用于治疗呼吸衰竭、copd和其他呼吸障碍。一种作用机制是气道入口处的高流量空气通过从患者的解剖死腔冲洗或冲掉呼出的co2来提高通气效率。因此,hft有时被称为死腔治疗(dst)。其它益处可包括升高的温暖和加湿(可能有益于分泌管理)以及气道压力适度升高的可能性。作为恒定流量的替代方案,治疗流量可遵循随呼吸循环变化的曲线。
22.流动治疗的另一种形式是长期氧疗法(ltot)或补充氧疗法。医生可以规定以特定的氧气浓度(从环境空气中的氧气分数的21%到100%),以特定的流量(例如,每分钟1升(lpm)、2lpm、3lpm等)将富氧空气的连续流输送至患者的气道。
23.呼吸治疗系统
24.这些呼吸治疗可以由呼吸治疗系统或装置提供。此类系统和装置也可以用于筛查、诊断、或监测病症而不治疗它。
25.呼吸治疗系统可以包括氧源、空气回路和患者接口。
26.氧源
27.本领域的专家已经认识到,对呼吸衰竭患者的锻炼提供了长期的益处,其减缓了疾病的进展,改善了生活质量并延长了患者的寿命。然而,大多数固定形式的锻炼如跑步机和固定自行车对于这些患者来说太费力。结果,长期以来认识到对移动性的需要。直到最近,通过使用安装在具有台车车轮的车上的小型压缩氧气罐或气瓶促进了这种流动性。这些罐的缺点是它们含有有限量的氧气并且是重的,在安装时重约50磅。
28.氧气浓缩器已经使用了大约50年来为呼吸治疗提供氧气。传统的氧气浓缩器体积大且笨重,使得普通的流动活动变得困难和不切实际。近来,制造大型固定式氧气浓缩器的公司开始开发便携式氧气浓缩器(poc)。poc的优点是它们可以产生理论上无限量的氧气供应。为了使这些装置的移动性小,需要用于生产富氧空气的各种系统被冷凝。poc寻求尽可能有效地利用其产生的氧,以最小化重量、尺寸和功耗。这可以通过以一系列脉冲或“团”输送氧气来实现,每个团定时为与吸入的开始一致。这种操作模式可以用保存器来实现。治疗模式被称为脉冲氧气输送(pod)或需求模式,与更适合于固定氧气浓缩器的传统连续流输送相反。
29.氧气浓缩器可以实施过程,例如真空变压吸附(vsa)、变压吸附(psa)或真空变压吸附(vpsa)。例如,氧气浓缩器(例如,poc)可以基于变压吸附过程(例如,真空变压吸附vsa、变压吸附psa或真空变压吸附vpsa,其各自在本文中被称为“变压吸附过程”)中的减压(例如,真空操作)和/或加压(例如,压缩机操作)来工作。例如,氧气浓缩器可以控制变压吸附(psa)过程。变压吸附涉及使用压缩机来增加罐内的气体压力,其包含气体分离吸附剂的颗粒,该气体分离吸附剂比氧更强烈地吸引氮气。这种填充有吸附剂的罐称为筛床。环境空气通常包括大约78%的氮气和21%的氧气,余量由氩气、二氧化碳、水蒸气和其它痕量气体组成。如果进料气体混合物例如空气在压力下通过筛床,则部分或全部氮气将被筛床吸附,并且从容器出来的气体将富含氧气。当筛床达到其吸附氮气的能力的终点时,可以通过降低压力使其再生,从而释放所吸附的氮气。然后准备进行另一个生产富氧空气的“psa循环”。通过在双罐系统中交替罐,一个罐可以浓缩氧气(所谓的“吸附阶段”),而另一个罐被净化(“净化阶段”)。这种交替导致氧气与氮气的连续分离。以这种方式,氧气可以连续地从空气中浓缩出来,用于各种用途,包括向用户提供ltot。
30.真空变压吸附(vsa)提供了替代的气体分离技术。vsa通常使用真空(例如被配置成与筛床产生真空的压缩机)将气体抽吸通过筛床的分离过程。真空变压吸附(vpsa)可理解为使用组合的真空和加压技术的混合系统。例如,vpsa系统可以对用于分离过程的筛床加压,并且还施加真空以净化床。
31.空气回路
32.空气回路是被构造和布置为在使用中允许可呼吸气流在诸如氧源和患者接口的呼吸治疗系统的两个部件之间行进的导管或管。在一些情况下,可具有用于吸气和呼气的空气回路的独立分支。在其它情况下,单个分支空气回路用于吸气和呼气。
33.患者接口
34.患者接口可用于将呼吸设备接合到其佩戴者,例如通过向气道的入口提供空气流。空气流可以经由面罩提供到患者鼻和/或嘴里、经由管提供到嘴里,或经由气切管提供到患者的气管中。根据待施加的治疗,患者接口可与例如患者面部的区域形成密封,从而有
利于气体以与环境压力有足够差异的压力(例如,相对于环境压力大约10cmh2o的正压)进行的输送,以实现治疗。对于其他形式的治疗,诸如氧气输送,患者接口可以不包括足以有利于将约10cmh2o的正压下的气体供应输送至气道的密封。对于诸如鼻ltot的流动治疗,患者接口被配置为对鼻孔吹气,但是具体地避免完全密封。这种患者接口的一个示例是鼻套管。
35.氧气浓缩器可以以脉冲或需求模式控制富氧空气的释放。这可以通过以一系列脉冲的形式输送氧气来实现,其中每个脉冲或“团”可以被定时为与吸气一致。这种模式通常通过致动气动阀来控制,该气动阀在固定时间内释放富氧空气。固定时间被校准为与期望或目标团尺寸(例如目标团体积)相关联。然而,这种固定时间团释放过程并不总是实现目标团体积。例如,诸如压缩机可变性以及吸附过程(例如,psa循环、筛床条件、空气过滤器条件等)的系统特性可影响所输送的团尺寸,导致所输送的团尺寸的可变性超过可接受的性能界限。
36.因此,需要用于团释放的方法和设备,其更接近目标体积地调节所输送的团的尺寸。
技术实现要素:
37.本技术的示例可以提供用于氧气浓缩器(例如便携式氧气浓缩器)的受控操作的方法和设备。特别地,该技术提供了用于便携式氧气浓缩器的方法和设备,其具有控制模式以调节释放的富氧空气量,例如通过控制团的释放以更可靠地实现目标团尺寸(例如体积)。在一些形式中,该方法和设备动态地控制释放团的供应阀的致动定时。动态控制使定时适于输送富氧空气的蓄积器的测量压力的变化。动态控制部分地基于供应阀致动定时和蓄积器压力方面的团体积模型。在一些实现中,可以修改动态控制,以基于待输送的富氧空气的温度的测量来实现期望的目标团尺寸。
38.本技术的一些形式可以包括操作氧气浓缩器的方法。该方法可以包括用被配置为感测与由所述氧气浓缩器产生的富氧空气的蓄积相关联的位置处的压力的传感器产生表示所蓄积的富氧空气的测量压力的信号;该方法可以包括用传感器产生指示氧气浓缩器的用户的呼吸的信号。该方法可以包括用被配置为用于接收表示测量压力的信号和指示所述用户的呼吸的所述信号的控制器,响应于指示呼吸的所述信号并且根据目标持续时间来控制阀的致动,所述阀适于用于释放所述蓄积的富氧空气的团,该方法可以包括控制器根据测量压力的值的函数来动态地确定团释放期间的目标持续时间。
39.在一些形式中,控制器可以通过以下来控制阀的致动:(a)在与指示所述用户呼吸的所述信号中的吸气特征的检测相关联的第一时间打开所述阀以启动所述团的释放,以及(b)当从所述第一时间起经过的时间达到或超过所述目标持续时间时关闭所述阀。当从第一时间起经过的时间达到或超过最大时间时,控制器可以关闭阀。控制器可制止关闭阀直到从第一时间起经过的时间达到或超过最小时间。任选地,测量压力的值可以是计算的平均值。所计算的平均值可以是团释放期间的平均压力。在一些形式中,控制器可以(a)在所述团的释放期间重复地更新所述平均压力和所述目标持续时间,以及(b)在所述团的释放期间重复地将所述经过的时间与所述更新的目标持续时间进行比较。
40.在一些形式中,该函数可以包括目标团尺寸。控制器可以计算作为检测到的用户
呼吸速率和与氧气浓缩器的流量设定相关联的流量的函数的目标团尺寸。该方法可以包括用传感器产生指示蓄积的富氧空气的温度的信号。控制器可以根据指示蓄积的富氧空气的温度的信号来调节目标团尺寸。
41.该函数可以包括从校准过程的压力值和阀打开时间导出的模型化表面的多个经验常数。模型化表面可以是双线性的。在一些形式中,所述函数可以包括:其中targetduration可以是目标持续时间,targetbolussize可以是目标团尺寸,p可以是测量压力的值;并且a、b、c和d可以是经验常数。经验常数可以包括与氧气浓缩器的流量设定相关联的经验常数的选定集合。选定集合可以从经验常数的多个离散集合中选择,所述经验常数的多个离散集合分别与氧气浓缩器的多个离散流量设定相关联。
42.在一些形式中,所述控制器可以包括:空闲状态、开始状态、团估计状态和停止状态。当检测到指示用户呼吸的信号中的吸气特征时,控制器可以从空闲状态转换到开始状态。在开始状态中,控制器可产生打开阀的信号,并初始化阀定时器。在开始状态中,控制器可以用取自表示在开始状态中测量压力的信号的样本计算平均压力值。当阀定时器超过最小时间时,控制器可以从开始状态转换到团估计状态。在团估计状态中,控制器可以用平均压力值重复地计算目标持续时间。在团估计状态中,控制器可以用取自表示在团估计状态中的测量压力的信号的样本重复地计算平均压力值。在团估计状态中,控制器可以重复地将目标持续时间与阀定时器进行比较。当(a)阀定时器达到或超过目标持续时间时,或者(b)当阀定时器达到或超过最大时间时,控制器可以转换到停止状态。在停止状态中,控制器可以停止产生打开阀的信号。
43.本技术的一些形式可以包括氧气浓缩器。氧气浓缩器可以包括一个或多个含有气体分离吸附剂的筛床。该氧气浓缩器可以包括压缩系统,其包括马达操作的压缩机,其被配置为将进料气体进料到该一个或多个筛床中。氧气浓缩器可包括被配置为从一个或多个筛床接收富氧空气的蓄积器。该氧气浓缩器可以包括呼吸传感器,其被配置为用于产生指示该氧气浓缩器的用户的呼吸的信号。该氧气浓缩器可以包括压力传感器,其被配置为用于产生表示该蓄积器中的富氧空气的压力测量的信号。该氧气浓缩器可以包括阀,其适于用于从该蓄积器释放该富氧空气团。氧气浓缩器可以包括存储器。氧气浓缩器可以包括控制器,其可以包括一个或多个处理器。该一个或多个处理器可以由存储在存储器中的程序指令配置,以执行根据在此描述的任何一个或多个方法操作氧气浓缩器的方法。
44.本技术的一些形式可以包括其上编码有计算机可读指令的计算机可读介质,所述计算机可读指令在由氧气浓缩器的控制器执行时使得控制器执行根据本文所述的方法中的任何一个或多个的操作氧气浓缩器的方法。
45.本技术的一些形式可以包括氧气浓缩器。氧气浓缩器可以包括一个或多个含有气体分离吸附剂的筛床。氧气浓缩器可以包括压缩系统,例如包括马达操作的压缩机,其被配置为将进料气体进料到一个或多个筛床中。氧气浓缩器可包括从一个或多个筛床接收富氧空气的蓄积器。该氧气浓缩器可以包括压力传感器,其被配置为用于产生表示该蓄积器中的富氧空气的测量压力的信号。该氧气浓缩器可以包括呼吸传感器,其被配置为用于产生指示该氧气浓缩器的用户的呼吸的信号。该氧气浓缩器可以包括阀,其适于用于从该蓄积
器释放该富氧空气团。氧气浓缩器可包括与压力传感器、呼吸传感器和阀连接的控制器。控制器可以被配置为接收表示测量压力的信号。控制器可以被配置为接收指示呼吸的信号。该控制器可以被配置为响应于指示呼吸的信号并且根据目标持续时间来控制该阀的致动以释放该富氧空气团。控制器控制器可以被配置为根据测量压力的值的函数来动态地确定该团的释放期间的目标持续时间。
46.在一些形式中,控制器可以被配置为通过以下来控制阀的致动:(a)在与指示所述用户呼吸的所述信号中的吸气特征的检测相关联的第一时间打开所述阀以启动所述团的释放,以及(b)当从所述第一时间起经过的时间达到或超过所述目标持续时间时关闭所述阀。当从该第一时间起经过的时间达到或超过最大时间时,该控制器可以被配置为关闭该阀。该控制器可以被配置为制止关闭该阀直到从该第一时间起经过的时间达到或超过一个最小时间。测量压力的值可以是计算的平均值。计算的平均值可以是团释放期间的平均压力。所述控制器可以被配置为(a)在所述团释放期间重复地更新所述平均压力和所述目标持续时间,以及(b)在所述团释放期间重复地将所述经过的时间与所述更新的目标持续时间进行比较。该函数可以包括目标团尺寸。该控制器可以被配置为计算作为检测到的用户呼吸速率和与氧气浓缩器的流量设定相关联的流量的函数的目标团尺寸。氧气浓缩器还可包括传感器,该传感器被配置为产生表示蓄积器中的富氧空气的温度的信号。控制器可以被配置为用于根据指示该富氧空气的温度的信号来调节该目标团尺寸。
47.在一些形式中,该函数可以包括从校准过程的压力值和阀打开时间导出的模型化表面的多个经验常数。模型化表面可以是双线性的。该函数可以被确定为:其中:targetduration可以是目标持续时间,targetbolussize可以是目标团尺寸,p可以是测量压力的值;并且a、b、c和d是经验常数。经验常数可以包括与氧气浓缩器的流量设定相关联的经验常数的选定集合。该控制器可以被配置为从经验常数的多个离散集合中选择选定集合,所述经验常数的多个离散集合分别与氧气浓缩器的多个离散流量设定相关联。
48.在一些形式中,为调节团释放,所述控制器可配置有:空闲状态、开始状态、团估计状态和停止状态。控制器可以被配置为在检测到指示用户呼吸的信号中的吸气特征时,从空闲状态转换到开始状态。在开始状态中,控制器可配置为产生打开阀的信号,并初始化阀定时器。在开始状态中,控制器可以被配置为使用取自表示在开始状态中的测量压力的信号的样本来计算平均压力值。当所述阀定时器超过最小时间时,所述控制器可以被配置为从所述开始状态转换到所述团估计状态。在团估计状态中,控制器可以被配置为用平均压力值重复地计算目标持续时间。在团估计状态中,控制器可以被配置为用取自表示团估计状态中的测量压力的信号的样本来重复地计算平均压力值。在团估计状态中,控制器可以被配置为重复地将目标持续时间与阀定时器进行比较。当(a)该阀定时器达到或超过该目标持续时间时,或者(b)该阀定时器达到或超过最大时间时,该控制器可以被配置为转换到该停止状态。在停止状态中,控制器可配置为停止产生打开阀的信号。
49.本技术的一些形式可以包括设备。该设备可以包括用于容纳气体分离吸附剂的床装置。该设备可以包括用于将进料气体进料到床装置中的装置。该设备可包括用于从床装置接收富氧空气的蓄积装置。该设备可包括压力感测装置,其用于产生表示蓄积装置中富
氧空气的测量压力的信号。该设备可以包括呼吸感测装置,其用于产生指示所述设备的用户的呼吸的信号。该设备可以包括释放装置,该释放装置适于从蓄积装置释放富氧空气的团。该设备可以包括控制装置,其与所述压力感测装置、所述呼吸感测装置和所述释放装置联接。控制装置可以用于接收表示测量压力的信号。控制装置可以用于接收指示呼吸的信号。控制装置可以用于响应于指示呼吸的信号并根据目标持续时间来控制释放装置的致动以释放蓄积的富氧空气团。控制装置可以用于根据测量压力的值的函数来动态地确定团释放期间的目标持续时间。
50.当然,这些方面的一部分可以形成本技术的子方面。此外,子方面和/或方面中的各个方面可以各种方式进行组合,并且还构成本技术的其他方面或子方面。
51.考虑到以下详细描述、摘要、附图和权利要求书中包含的信息,本技术的其他特征将变得显而易见。
附图说明
52.受益于以下具体实施方式的详细描述并参考附图,本技术的优点对于本领域技术人员将变得显而易见,其中:
53.图1描绘了根据本技术的一种形式的氧气浓缩器。
54.图2是图1的氧气浓缩器的气动系统的示意图。
55.图3是图1的氧气浓缩器的主要部件的侧视图。
56.图4是图1的氧气浓缩器的压缩系统的透视侧视图。
57.图5是包括热交换导管的压缩系统的侧视图。
58.图6是图1的氧气浓缩器的示例性出口部件的示意图。
59.图7描绘了用于图1的氧气浓缩器的出口管道。
60.图8描绘了用于图1的氧气浓缩器的替代出口管道。
61.图9是用于图1的氧气浓缩器的分解的罐系统的透视图。
62.图10是图9的罐系统的端视图。
63.图11是图10描绘的罐系统端部的装配图。
64.图12是图9的罐系统相对于图10和图11所示的罐系统的相对端的视图。
65.图13是图12描绘的罐系统端部的装配图。
66.图14描绘了用于图1的氧气浓缩器的示例控制面板。
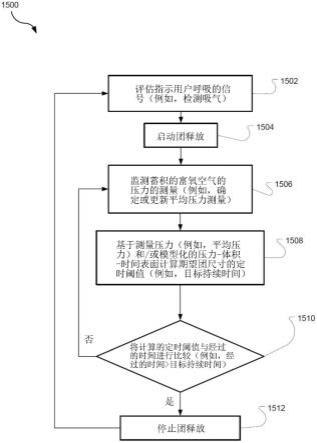
67.图15是例如用图1的氧气浓缩器的控制器来控制团释放的示例方法的流程图。
68.图16是示出了用于确定模型化系数的校准过程的曲线图,模型化系数对于可以利用图15的控制方法实现的团释放控制的应用是有用的。
69.图17是利用图15的方法在图1的氧气浓缩器的控制器中操作的示例状态机。
70.图18是示出了在没有图15的方法的情况下操作的氧气浓缩器的团尺寸随时间变化的曲线图。
71.图19是示出了对于利用图15的方法操作的氧气浓缩器,例如根据在此更详细地描述的技术的示例,随时间变化的团尺寸的曲线图。
具体实施方式
72.涉及氧气浓缩器的本技术的示例吸附装置可参照附图的示例来考虑。本技术的示例可以用以下结构和操作中的任一个来实现。
73.图1至图14示出了氧气浓缩器100的实现。氧气浓缩器100可在空气流中浓缩氧气以向使用者提供富氧空气。氧气浓缩器100可以是便携式氧气浓缩器。例如,氧气浓缩器100可具有允许氧气浓缩器用手和/或在携带箱中携带的重量和尺寸。在一个实现中,氧气浓缩器100具有小于约20磅、小于约15磅、小于约10磅,或小于约5磅的重量。在一个实现中,氧气浓缩器100具有小于约1000立方英寸、小于约750立方英寸、小于约500立方英寸、小于约250立方英寸,或小于约200立方英寸的体积。
74.如本文所述,氧气浓缩器100使用变压吸附(psa)方法(其是循环的)来产生富氧空气。然而,在其他实现中,氧气浓缩器100可以被修改成使得它使用循环真空变压吸附(vsa)方法或循环真空变压吸附(vpsa)方法来产生富氧空气。
75.外壳体
76.图1描绘了氧气浓缩器100的外壳体170的实现。在一些实现中,外壳体170可以由轻质塑料构成。外壳体包括压缩系统入口105、冷却系统被动入口101和位于外壳体170每一端的出口173、出口端口174和控制面板600。入口101和出口173允许冷却空气进入壳体,流过壳体,并离开壳体170的内部,以帮助冷却氧气浓缩器100。压缩系统入口105允许空气进入压缩系统。出口174用于附接导管以向用户提供由氧气浓缩器100产生的富氧空气。
77.气动系统
78.图2是根据实现的氧气浓缩器例如氧气浓缩器100的气动系统的示意图。气动系统可将氧气集中在空气流中,以将富氧空气提供给出口系统(如下所述)。
79.富氧空气可以通过加压罐302和304中的环境空气而从环境空气中产生,罐302和304包含气体分离吸附剂,因此称为筛床。可用于氧气浓缩器中的气体分离吸附剂能够从空气流中至少分离氮气以产生富氧空气。气体分离吸附剂的示例包括能够从空气流中分离氮气的分子筛。可用于氧气浓缩器中的吸附剂的示例包括但不限于沸石(天然)或合成结晶铝硅酸盐,其在升高的压力下在空气流中分离氮气。可使用的合成结晶铝硅酸盐的示例包括但不限于:oxysiv吸附剂,获自iw德斯普兰斯uop llc;sylobead吸附剂,获自马里兰州哥伦比亚市w.r.grace&co;siliporite吸附剂,获自法国巴黎ceca s.a;zeochem吸附剂,获自瑞士zeochem ag,uetikon;和aglilsx吸附剂,获自宾夕法尼亚州阿伦敦air products and chemicals,inc.。
80.如图2所示,空气可以通过空气入口105进入氧气浓缩器。空气可以通过压缩系统200吸入空气入口105。压缩系统200可以从氧气浓缩器的周围吸入空气并压缩空气,迫使压缩空气进入罐302和304中的一个或两个。在一个实现中,入口消音器108可以联接到空气入口105,以减少由压缩系统200吸入氧气浓缩器的空气产生的声音。在一个实现中,入口消音器108可以是湿气和声音吸收消音器。例如,可以使用吸水材料(例如聚合物吸水材料或沸石材料)来从进入的空气中吸收水并降低进入空气入口105的空气的声音。
81.压缩系统200可包括被配置为压缩空气的一个或多个压缩机。由压缩系统200产生的加压空气可被迫进入罐302和304中的一个或两个。在一些实现中,环境空气可以在罐中加压到大约在13-20磅/平方英寸表压(psig)范围内的压力。根据设置在罐中的气体分离吸
附剂的类型,也可以使用其它压力。
82.联接到每个罐302/304的是入口阀122/124和出口阀132/134。如图2所示,入口阀122联接到罐302,入口阀124联接到罐304。出口阀132联接到罐302,出口阀134联接到罐304。入口阀122/124用于控制从压缩系统200到相应罐的空气通道。出口阀132/134用于在排气过程中从各个罐释放气体。在一些实现中,入口阀122/124和出口阀132/134可以是硅柱塞电磁阀。然而,也可以使用其它类型的阀。柱塞阀通过安静和具有低滑动而提供优于其它类型阀的优点。
83.在一些实现中,两级阀致动电压可用于控制入口阀122/124和出口阀132/134。例如,可以将高电压(例如24v)施加到入口阀以打开入口阀。然后可以降低电压(例如,降低到7v)以保持入口阀打开。使用较小的电压来保持阀打开可以使用较小的功率(功率=电压*电流)。这种电压的降低使热积累和功耗最小化,以延长电池的运行时间。当切断对所述阀的所述力时,其通过弹簧作用而关闭。在一些实现中,可以施加作为时间的函数的电压,其不一定是阶跃响应(例如,在初始24v和最终7v之间的弯曲向下电压)。
84.在一种实现中,加压空气被送入罐302或304中的一个,而另一个罐被排气。例如,在使用期间,入口阀122打开而入口阀124关闭。来自压缩系统200的加压空气被迫进入罐302,同时被入口阀124阻止进入罐304。在一个实现中,控制器400电联接到阀122、124、132和134。控制器400包括可操作以执行存储在存储器420中的程序指令的一个或多个处理器410。程序指令配置控制器以执行用于操作氧气浓缩器的各种预定方法,例如在此更详细描述的方法。程序指令可以包括用于彼此异相地操作入口阀122和124的程序指令,即,当入口阀122或124中的一个打开时,另一个阀关闭。在罐302的加压过程中,出口阀132关闭而出口阀134打开。类似于入口阀,出口阀132和134彼此异相地操作。在一些实现中,用于打开输入和输出阀的电压和电压的持续时间可以由控制器400控制。
85.控制器400可包括收发器430,其可与外部装置通信以传输由处理器410收集的数据或从外部计算装置接收用于处理器410的指令。
86.止回阀142和144分别联接到罐302和304。止回阀142和144可以是单向阀,其其由罐被加压和排气时产生的压差被动地操作,或者可以是主动阀。止回阀142和144联接到罐,以允许在每个罐的加压过程中产生的富氧空气流出罐,并阻止富氧空气或任何其它气体回流到罐中。以这种方式,止回阀142和144用作单向阀,允许富氧空气在加压过程中离开相应的罐。
87.这里使用的术语“止回阀”是指允许流体(气体或液体)沿一个方向流动并阻止流体回流的阀。适合使用的止回阀的示例包括但不限于:球形止回阀;隔膜止回阀;蝶形止回阀;摆动止回阀;鸭嘴阀;伞形阀;以及提升止回阀。在压力下,加压环境空气中的氮分子被加压罐中的气体分离吸附剂吸附。当压力增加时,更多的氮气被吸附,直到罐中的气体富含氧气。当压力达到足以克服联接到罐的止回阀的阻力的点时,未吸附的气体分子(主要是氧气)流出加压罐。在一个实现中,止回阀在向前方向上的压降小于1psig。反方向的破裂压力大于100psig。然而,应当理解,一个或多个部件的修改将改变这些阀的操作参数。如果前向流压力增加,通常富氧空气产量减少。如果用于反向流动的破裂压力降低或设定得太低,则通常存在富氧空气压力的降低。
88.在示例性实现中,罐302由压缩系统200中产生的压缩空气加压并通入罐302中。在
罐302的加压期间,入口阀122打开,出口阀132关闭,入口阀124关闭且出口阀134打开。当出口阀132关闭时,出口阀134打开,以允许罐302被加压时允许罐304基本上同时排放到大气中。罐302被加压直到罐中的压力足以打开止回阀142。在罐302中产生的富氧空气通过止回阀排出,并且在一种实现中,被收集在蓄积器106中。
89.在一段时间之后,气体分离吸附剂将变得被氮气饱和并且将不能从进入的空气中分离大量的氮气。这一点通常在富氧空气产生的预定时间之后达到。在上述实现中,当罐302中的气体分离吸附剂达到该饱和点时,停止压缩空气的流入,并将罐302排气以除去氮气。在排气期间,入口阀122关闭,而出口阀132打开。当罐302被排气时,罐304以与上述相同的方式被加压以产生富氧空气。罐304的加压通过关闭出口阀134和打开入口阀124来实现。富氧空气通过止回阀144离开罐304。
90.在罐302的排气期间,出口阀132打开,允许加压气体(主要是氮气)通过浓缩器出口130离开罐到大气。在一个实现中,排出的气体可以被引导通过消音器133,以减少由从罐释放加压气体而产生的噪音。当气体从罐302释放时,罐302中的压力下降,允许氮气从气体分离吸附剂解吸。释放的氮气通过出口130离开罐,将罐复位到允许氮气从空气流中重新分离的状态。消音器133可包括开孔泡沫(或其它材料)以消音离开氧气浓缩器的气体的声音。在一些实现中,用于空气输入和富氧空气输出的组合消声部件/技术可以提供在低于50分贝的声级下的氧气浓缩器操作。
91.在罐的排气过程中,有利的是除去至少大部分氮气。在一个实现中,在罐中的至少约50%,至少约60%,至少约70%,至少约80%,至少约90%,至少约95%,至少约98%,或基本上所有的氮气在再用于从空气中分离氮之前被除去。在一些实现中,可以使用从另一个罐引入罐中的富氧空气流进一步清除罐中的氮气。
92.在示例性实现中,当罐304被排出氮气时,一部分富氧空气可以从罐302转移到罐304。在罐304排气期间将富氧空气从罐302转移到304有助于进一步从罐中吹扫氮气(和其它气体)。在一个实现中,富氧空气可以通过两个罐之间的限流器151、153和155。限流器151可以是滴流限流器。限流器151例如可以是0.009d限流器(例如,限流器具有小于其内部的管道的直径的半径0.009”)。限流器153和155可以是0.013d的限流器。也可以考虑其它限流器类型和尺寸,并且可以根据用于联接罐的具体配置和管道来使用。在一些实现中,限流器可以是压配合限流器,其通过在其相应的管中引入较窄的直径来限制气流。在一些实现中,压配合限流器可由蓝宝石、金属或塑料(也可考虑其它材料)制成。
93.还通过使用阀152和阀154来控制富氧空气在罐之间的流动。阀152和154可以在排气过程中短暂地打开(并且可以以其它方式关闭),以防止过多的氧气从吹扫罐损失。也可以考虑其它持续时间。在示例性实现中,罐302被排气,并且希望通过将罐304中产生的一部分富氧空气通入罐302中来吹扫罐302。在罐302的排气过程中,在罐304加压时,一部分富氧空气将通过限流器151进入罐302。另外的富氧空气从罐304通过阀154和限流器155进入罐302。阀152可以在转移过程中保持关闭,或者如果需要额外的富氧空气则可以打开。选择合适的限流器151和155,结合阀154的受控打开,允许受控量的富氧空气从罐304输送到罐302。在一个实现中,富氧空气的受控量是足以吹扫罐302并使通过罐302的通气阀132的富氧空气损失最小化的量。虽然该实现描述了罐302的通气,但是应当理解,使用限流器151、阀152和限流器153,相同的过程可用于使罐304通气。
94.该对平衡/排气阀152/154与限流器153和155一起工作,以优化两个罐之间的气流平衡。这可以允许对罐中的一个罐排放来自罐中的另一个罐的富氧空气的更好的流量控制。它还可以在两个罐之间提供更好的流动方向。已经发现,尽管流量阀152/154可以作为双向阀操作,但是通过这种阀的流速根据流过阀的流体的方向而变化。例如,从罐304流向罐302的富氧空气通过阀152的流速比从罐302流向罐304的富氧空气通过阀152的流速快。如果使用单个阀,最终将在罐之间输送太多或太少的富氧空气,并且随着时间的过去,罐将开始产生不同量的富氧空气。在平行的空气通道上使用相对的阀和限流器可以平衡两个罐之间的富氧空气的流动模式。使流量相等可以允许用户在多个循环中获得稳定量的富氧空气,并且还可以允许可预测量的富氧空气吹扫另一个罐。在一些实现中,空气通道可以不具有限流器,而是可以具有带有内置阻力的阀,或者空气通道本身可以具有窄的半径以提供阻力。
95.有时,氧气浓缩器可以关闭一段时间。当氧气浓缩器关闭时,罐内的温度可能由于来自压缩系统的绝热热量损失而下降。当温度下降时,由罐内气体占据的体积将下降。罐的冷却可导致罐中的负压。通向和来自罐的阀(例如,阀122、124、132和134)被动态地密封而不是气密地密封。因此,外部空气可以在关闭之后进入罐以适应压力差。当外部空气进入罐时,来自外部空气的湿气可被气体分离吸附剂吸附。罐内水的吸附可导致气体分离吸附剂的逐渐降解,稳定地降低气体分离吸附剂产生富氧空气的能力。
96.在一个实现中,在氧气浓缩器关闭之后,通过在关闭之前对两个罐加压,可以阻止外部空气进入罐。通过在正压力下存储罐,阀可通过罐中空气的内部压力而被迫进入气密关闭位置。在一个实现中,在关闭时,罐中的压力应该至少大于环境压力。如本文所用,术语“环境压力”是指氧气浓缩器所处的环境的压力(例如室内、室外、平面内等的压力)。在一个实现中,在关闭时,罐中的压力至少大于标准大气压(即,大于760mmhg(托)、1at、101,325pa)。在一个实现中,在关闭时,罐中的压力比环境压力大至少约1.1倍;比环境压力大至少约1.5倍;或比环境压力大至少约2倍。
97.在一个实现中,罐的加压可以通过将加压空气从压缩系统引导到每个罐中并且关闭所有阀以将加压空气捕集在罐中来实现。在示例性实现中,当启动关闭序列时,入口阀122和124打开而出口阀132和134关闭。因为入口阀122和124通过公共导管连接在一起,所以罐302和304都可以被加压,因为来自一个罐的空气和/或富氧空气可以被转移到另一个罐。当压缩系统和两个入口阀之间的通道允许这种转移时,可能发生这种情况。因为氧气浓缩器以交替加压/通气模式操作,所以至少一个罐在任何给定时间都应该处于加压状态。在一个替代实现中,可以通过压缩系统200的操作来增加每个罐中的压力。当入口阀122和124打开时,罐302和304之间的压力将均衡,然而,任一罐中的均衡压力可能不足以阻止空气在关闭期间进入罐。为了确保阻止空气进入罐,压缩系统200可以运行足够的时间以将两个罐内的压力增加到至少大于环境压力的水平。不管罐的加压方法如何,一旦罐被加压,入口阀122和124关闭,将加压空气截留在罐内,这在关闭期间阻止空气进入罐。
98.参照图3,示出了氧气浓缩器100的实现。氧气浓缩器100包括压缩系统200、罐系统300和设置在外壳体170内的电源180。入口101位于外壳体170中,以允许来自环境的空气进入氧气浓缩器100。入口101可允许空气流入隔室以帮助冷却隔室中的部件。电源180为氧气浓缩器100提供电源。压缩系统200通过入口105和消音器108吸入空气。消音器108可以降低
由压缩系统吸入的空气的噪音,并且还可以包括干燥剂材料以从进入的空气中去除水。氧气浓缩器100还可包括风扇172,用于通过出口173从氧气浓缩器排出空气和其它气体。
99.压缩系统
100.在一些实现中,压缩系统200包括一个或多个压缩机。在另一实现中,压缩系统200包括单个压缩机,其联接到罐系统300的所有罐。转到图4和图5,示出了包括压缩机210和马达220的压缩系统200。马达220联接到压缩机210并向压缩机提供操作力以操作压缩机构。例如,马达220可以是提供旋转部件的马达,该旋转部件引起压缩空气的压缩机部件的循环运动。当压缩机210是活塞式压缩机时,马达220提供使压缩机210的活塞往复运动的操作力。活塞的往复运动使压缩机210产生压缩空气。压缩空气的压力部分地由压缩机运行的速度(例如,活塞往复运动的速度)估计。因此,马达220可以是变速马达,其可在各种速度下操作以动态地控制由压缩机210产生的空气的压力。
101.在一种实施方式中,压缩机210包括具有活塞的单头摆动型压缩机。可以使用其它类型的压缩机,例如隔膜压缩机和其它类型的活塞压缩机。马达220可以是dc或ac马达,并向压缩机210的压缩部件提供工作功率。在一种实现中,马达220可以是无刷dc马达。马达220可以是变速马达,其被配置为以变速操作压缩机210的压缩部件。如图2中所描绘的,马达220可以联接到控制器400,其向马达发送操作信号以控制马达的操作。例如,控制器400可以向马达220发送信号以:打开马达,关闭马达,并设定马达的运行速度。因此,如图2所示,压缩系统可包括速度传感器201。速度传感器可以是用于确定马达220的旋转速度和/或压缩系统200的其它往复操作的马达速度转换器。例如,可以将来自马达速度转换器的马达速度信号提供给控制器400。速度传感器或马达速度转换器例如可以是霍尔效应传感器。控制器400可基于氧气浓缩器的速度信号和/或任何其它传感器信号,例如压力传感器(例如,蓄积器压力传感器107),经由马达220操作压缩系统。因此,如图2所示,控制器400接收传感器信号,例如来自速度传感器201的速度信号和来自蓄积器压力传感器107的蓄积器压力信号。利用这样的信号,控制器可以实现一个或多个控制回路(例如,反馈控制),用于基于传感器信号(例如蓄积器压力和/或马达速度)操作压缩系统,如在此更详细描述的。
102.压缩系统200固有地产生大量的热量。热量由马达220的功率消耗和功率到机械运动的转换引起。由于被压缩的空气对压缩机部件移动的阻力增加,压缩机210产生热量。由于压缩机210对空气的绝热压缩,也固有地产生热量。因此,空气的持续加压在外壳中产生热量。另外,电源180可在向压缩系统200供电时产生热量。此外,氧气浓缩器的用户可以在无条件的环境(例如,户外)中在可能比户内更高的环境温度下操作该装置,因此进入的空气将已经处于加热状态。
103.在氧气浓缩器100内产生的热量可能是有问题的。锂离子电池由于其长寿命和轻重量而通常用作氧气浓缩器的电源。然而,锂离子电池组在高温下是危险的,并且如果检测到危险的高电源温度,则在氧气浓缩器100中采用安全控制来关闭系统。另外,当氧气浓缩器100的内部温度增加时,由浓缩器产生的氧气量可能减少。这部分是由于在较高温度下在给定体积的空气中减少的氧气量。如果产生的氧气量降到预定量以下,则氧气浓缩器100可自动关闭。
104.由于氧气浓缩器的紧凑特性,散热可能是困难的。解决方案通常包括使用一个或多个风扇来产生通过外壳的冷却空气流。然而,这样的解决方案需要来自电源的额外电力,
因此缩短了氧气浓缩器的便携式使用时间。在一种实现中,可以使用利用由马达220产生的机械动力的被动冷却系统。参考图4和图5,压缩系统200包括具有外部旋转电枢230的马达220。具体地,马达220(例如dc马达)的电枢230缠绕在驱动电枢的静磁场周围。由于马达220是整个系统的热的主要贡献者,所以将热从马达带走并将其扫出外壳是有帮助的。在外部高速旋转的情况下,马达的主要部件与其所存在的空气的相对速度非常高。电枢的表面积在外部安装时比在内部安装时更大。由于热交换的速率与表面积和速度的平方成比例,使用安装在外部的较大表面积的电枢增加了从马达220散热的能力。通过将电枢安装在外部而获得冷却效率,允许消除一个或多个冷却风扇,从而减少重量和功耗,同时将氧气浓缩器的内部保持在适当的温度范围内。另外,外部安装的电枢的旋转产生靠近马达的空气移动,以产生额外的冷却。
105.此外,外部旋转电枢可以有助于马达的效率,允许产生更少的热量。具有外部电枢的马达以类似于飞轮在内燃机中工作的方式工作。当马达驱动压缩机时,在低压下旋转阻力低。当压缩空气的压力较高时,马达的旋转阻力较高。结果,马达不能保持一致的理想旋转稳定性,而是根据压缩机的压力要求而波动和减速。马达喘振然后减速的这种趋势是低效的,因此产生热量。外部电枢的使用给马达增加了更大的角动量,这有助于补偿马达所经受的可变电阻。由于马达不必用力工作,因此可以减少马达产生的热量。
106.在一种实现中,可以通过将空气传送装置240联接到外部旋转电枢230来进一步提高冷却效率。在一种实现中,空气传送装置240被联接到外部电枢230上,这样使得该外部电枢的旋转致使该空气传送装置产生经过该马达的至少一部分的空气流。在一种实现中,空气传送装置包括联接到该电枢上的一个或多个风扇叶片。在一种实现中,多个风扇叶片可以被布置在环形圈中,这样使得该空气传送装置充当叶轮,该叶轮通过该外部旋转电枢的移动而旋转。如图4和图5所示,空气传送装置240可安装到外部电枢230的外表面上,与马达对准。将空气传送装置安装到电枢上允许空气流指向外部旋转电枢的主要部分,从而在使用期间提供冷却效果。在一种实现中,空气传送装置引导气流,使得外部旋转电枢的大部分在气流路径中。
107.此外,参见图4和图5,由压缩机210加压的空气在压缩机出口212处离开压缩机210。压缩机出口导管250联接到压缩机出口212以将压缩空气传送到罐系统300。如前所述,空气的压缩导致空气温度的升高。这种温度的升高可能对氧气浓缩器的效率有害。为了降低加压空气的温度,压缩机出口导管250设置在由空气传送装置240产生的气流路径中。压缩机出口导管250的至少一部分可定位成靠近马达220。因此,由空气传送装置产生的空气流可接触马达220和压缩机出口导管250。在一种实现中,压缩机出口导管250的大部分被定位成靠近马达220。在一种实现中,压缩机出口导管250盘绕在马达220周围,如图5所示。
108.在一种实现中,压缩机出口导管250由热交换金属构成。热交换金属包括但不限于铝、碳钢、不锈钢、钛、铜、铜-镍合金或由这些金属的组合形成的其它合金。因此,压缩机出口导管250可用作热交换器,以除去由空气压缩固有产生的热量。通过从压缩空气中除去热量,在给定压力下给定体积中的分子数增加。结果,可以增加在每个变压循环期间由每个罐产生的氧气量。
109.这里描述的散热机制是被动的或利用氧气浓缩器100所需的元件。因此,例如,可以在不使用需要额外功率的系统的情况下增加热的耗散。通过不需要额外的功率,电池组
的运行时间可以增加,并且氧气浓缩器的尺寸和重量可以最小化。同样,可以不使用附加的箱式风扇或冷却单元。消除这种附加特征降低了氧气浓缩器的重量和功耗。
110.如上所述,空气的绝热压缩导致空气温度升高。在罐系统300中的罐的排气期间,从罐释放的气体的压力降低。罐中气体的绝热减压导致气体的温度在排出时下降。在一种实现中,来自罐系统300的冷却的排出的气体327被导向电源180和压缩系统200。在一种实现中,罐系统300的基座315接收来自罐的排出的气体。排出的气体327通过基座315导向基座的出口325和电源180。如上所述,排出的气体由于气体的减压而被冷却,并因此被动地对电源提供冷却。当压缩系统工作时,空气传送装置将收集冷却的排出的气体并将气体引向压缩系统200的马达。风扇172还可以帮助引导排出的气体穿过压缩系统200并且离开壳体170。以这种方式,可以获得额外的冷却不需要来自电池的任何进一步的功率要求。
111.罐系统
112.氧气浓缩器100可包括至少两个罐,每个罐包括气体分离吸附剂。氧气浓缩器100的罐可以由模制壳体形成。在一种实现中,罐系统300包括两个壳体部件310和510,如图9所示。在各种实现中,氧气浓缩器100的壳体部件310和510可以形成限定两个罐302和304以及蓄积器106的两部分模制的塑料框架。壳体部件310和510可以单独形成,然后连接在一起。在一些实现中,壳体部件310和510可以是注射模制的或压缩模制的。壳体部件310和510可以由热塑性聚合物制成,例如聚碳酸酯、亚甲基碳化物、聚苯乙烯、丙烯腈丁二烯苯乙烯(abs)、聚丙烯、聚乙烯或聚氯乙烯。在另一种实现中,壳体部件310和510可以由热固性塑料或金属(例如不锈钢或轻质铝合金)制成。轻质材料可用于降低氧气浓缩器100的重量。在一些实现中,两个壳体310和510可以使用螺钉或螺栓紧固在一起。或者,壳体部件310和510可以溶剂焊接在一起。
113.如图所示,阀座322、324、332和334以及导管330和346的空气通道可以集成到壳体部件310中,以减少氧气浓缩器100的整个空气流中所需的密封连接的数量。
114.壳体部件310和510中的不同部分之间的空气通道/管道可以采用模制管道的形式。用于空气通道的模制通道形式的导管可以占据壳体部件310和510中的多个平面。例如,模制空气管道可以形成在外壳部件310和510中的不同深度和不同x、y、z位置。在一些实现中,这些导管中的大部分或基本上全部可以被整合到壳体部件310和510中以减少潜在的泄漏点。
115.在一些实现中,在将壳体部件310和510联接在一起之前,可以将o形环放置在壳体部件310和510的不同点之间以确保壳体部件被适当地密封。在一些实现中,部件可以单独地集成和/或联接到外壳部件310和510。例如,管道、限流器(例如,压配合限流器)、氧传感器、气体分离吸附剂、止回阀、插头、处理器、电源等可以在壳体部件联接在一起之前和/或之后联接到壳体部件310和510。
116.在一些实现中,通向壳体部件310和510外部的孔口337可用于插入诸如限流器的装置。也可以使用孔口来提高可模塑性。一个或多个孔口可以在模制后被塞住(例如,用塑料塞)。在一些实现中,限流器可以在插入插塞之前插入通道中以密封通道。压配合限流器可具有允许压配合限流器与其相应孔口之间的摩擦配合的直径。在一些实现中,可以将粘合剂添加到压配合限流器的外部,以在插入后将压配合限流器保持在适当位置。在一些实现中,插塞可以与其相应的管具有摩擦配合(或者可以具有施加到其外表面的粘合剂)。压
配合限流器和/或其他部件可以使用窄尖端工具或杆(例如,直径小于相应孔口的直径)插入并压入它们相应的孔口中。在一些实现中,压配合限流器可以插入它们各自的管中,直到它们邻接管中的特征以停止它们的插入。例如,该特征可以包括半径的减小。也可以考虑其它特征(例如,在管的侧面的凸起、螺纹等)。在一些实现中,压配合限流器可以被模制到壳体部件中(例如,作为窄管段)。
117.在一些实现中,弹簧挡板139可以被放置在壳体部件310和510的对应的罐接纳部分中,其中挡板139的弹簧侧面向罐的出口。弹簧挡板139可以向罐中的气体分离吸附剂施加力,同时还有助于防止气体分离吸附剂进入出口孔口。使用弹簧挡板139可以保持气体分离吸附剂紧凑,同时还允许膨胀(例如热膨胀)。保持气体分离吸附剂紧凑可以防止气体分离吸附剂在氧气浓缩器100的运动期间破裂。
118.在一些实现中,过滤器129可以被放置在壳体部件310和510的面向相应罐的入口的相应罐接纳部分中。过滤器129从进入罐的进料气流中除去颗粒。
119.在一些实现中,来自压缩系统200的加压空气可以进入空气入口306。空气入口306联接到入口导管330。空气通过入口306进入壳体部件310,经过导管330,然后到达阀座322和324。图10和图11描绘了壳体310的端视图。图10描绘了在将阀装配到壳体310之前的壳体310的端视图。图11描绘了壳体310的端视图,其中阀装配到壳体310上。阀座322和324被配置为分别接纳入口阀122和124。出口阀122联接到罐302,出口阀124联接到罐304。壳体310还包括被配置为分别接收出口阀132和134的阀座332和334。出口阀132联接到罐302,出口阀134联接到罐304。入口阀122/124用于控制从导管330到相应罐的空气通道。
120.在一种实现中,加压空气被送入罐302或304中的一个,而另一个罐被排气。例如,在使用期间,入口阀122打开而入口阀124关闭。来自压缩系统200的加压空气被迫进入罐302,同时被入口阀124阻止进入罐304。在罐302的加压过程中,出口阀132关闭而出口阀134打开。类似于入口阀,出口阀132和134彼此异相地操作。阀座322包括穿过壳体310进入罐302的开口323。类似地,阀座324包括穿过壳体310进入罐302的开口375。如果相应的阀322和324打开,来自导管330的空气通过开口323或375,并进入罐。
121.止回阀142和144(见图9)分别联接到罐302和304。止回阀142和144是单向阀,其可由罐被加压和排气时产生的压差被动地操作。在罐302和304中产生的富氧空气从罐进入壳体部件510的开口542和544。通道(未示出)链接开口542和544分别连接到导管342和344。当罐中的压力足以打开止回阀142时,罐302中产生的富氧空气从罐通过开口542进入导管342。当止回阀142打开时,富氧空气通过导管342流向壳体310的端部。类似地,当罐中的压力足以打开止回阀144时,罐304中产生的富氧空气从罐通过开口544进入导管344。当止回阀144打开时,富氧空气通过导管344流向壳体310的端部。
122.来自任一罐的富氧空气穿过导管342或344并进入形成在壳体310中的导管346。导管346包括将导管连接到导管342、导管344和蓄积器106的开口。因此,在罐302或304中产生的富氧空气行进到导管346并进入蓄积器106。如图2所示,蓄积器106内的气体压力可以由传感器测量,例如用蓄积器压力传感器107测量。(另见图6)因此,蓄积器压力传感器提供表示蓄积的富氧空气的压力的信号。合适的压力转换器的示例是来自honeywell asdx系列的传感器。另一种合适的压力转换器是来自general electric的npa系列的传感器。在一些形式中,压力传感器可以替代地测量蓄积器106外部的气体的压力,例如在蓄积器106与阀(例
如,供应阀160)之间的输出路径中的压力,该阀控制富氧空气的释放以便以团输送至用户。
123.在一段时间之后,气体分离吸附剂将变得被氮气饱和并且将不能从进入的空气中分离大量的氮气。当罐中的气体分离吸附剂达到该饱和点时,停止压缩空气的流入并将罐排气以除去氮气。罐302通过关闭入口阀122和打开出口阀132而排气。出口阀132将排出的气体从罐302释放到由壳体310的端部限定的容积中。泡沫材料可以覆盖壳体310的端部,以减少由从罐释放气体而产生的声音。类似地,通过关闭入口阀124和打开出口阀134使罐304排气。出口阀134将排出的气体从罐304释放到由壳体310的端部限定的容积中。
124.当罐302被排气时,罐304以与上述相同的方式被加压以产生富氧空气。罐304的加压通过关闭出口阀134和打开入口阀124来实现。富氧空气通过止回阀144离开罐304。
125.在示例性实现中,当罐304被排出氮气时,一部分富氧空气可以从罐302转移到罐304。在罐304排气期间将富氧气体从罐302转移到罐304有助于进一步从罐中吹扫氮气(和其它气体)。如图2所示,使用限流器和阀控制富氧空气在罐之间的流动。在导管形成在壳体部件510中,用于在罐之间传送富氧空气。如图12所示,导管530将罐302联接到罐304。限流器151(未示出)设置在导管530中,在罐302和罐304之间,以在使用期间限制富氧空气的流动。导管532还将罐302联接到304。导管532与容纳阀152的阀座552联接,如图13所示。限流器153(未示出)设置在罐302和304之间的导管532中。导管534还将罐302联接到304。导管534与容纳阀154的阀座554联接,如图13所示。限流器155(未示出)设置在罐302和304之间的导管534中。该对平衡/排气阀152/154与限流器153和155一起工作,以优化两个罐之间的气流平衡。
126.蓄积器106中的富氧空气通过供应阀160进入形成在壳体部件510中的膨胀室162。壳体部件510中的开口(未示出)将蓄积器106联接到供应阀160。在一种实现中,膨胀室162可以包括被配置为估计穿过该室的气体的氧气浓度的一个或多个装置。
127.出口系统
128.连接到一个或多个罐的出口系统包括一个或多个用于向用户提供富氧空气的管道。在一个实现中,在罐302和304中的任一个中产生的富氧空气分别通过止回阀142和144被收集在蓄积器106中,如图6中示意性描绘的。离开罐的富氧空气可在被提供给用户之前被收集在氧气蓄积器106中。在一些实现中,管可以联接到蓄积器106以向用户提供富氧空气。富氧空气可通过气道输送装置提供给用户,该气道输送装置将富氧空气输送到用户的嘴和/或鼻子。在一种实现中,出口可以包括将氧气引向用户的鼻子和/或嘴的管,该管可以不直接联接到用户的鼻子上。
129.转到图6,示出了用于氧气浓缩器的出口系统的实现的示意图。供应阀160可联接到出口管以控制富氧空气从蓄积器106向用户的释放。在一种实现中,供应阀160是电磁致动的柱塞阀。供应阀160由控制器400致动,以控制向用户输送富氧空气。供应阀160的致动不与变压吸附过程定时或同步。相反,致动与用户的呼吸同步,如下所述。在一些实现中,供应阀160可以具有连续值的致动,以建立用于提供富氧空气的临床有效振幅轮廓。
130.如图6所示,蓄积器106中的富氧空气通过供应阀160进入膨胀室162。在一种实现中,膨胀室162可以包括被配置为估计穿过膨胀室162的气体的氧气浓度的一个或多个装置。膨胀室162中的富氧空气通过由供应阀160从蓄积器106释放气体而短暂地形成,然后通过小孔限流器175排放到流速传感器185,然后到颗粒过滤器187。限流器175可以是0.025d
的限流器。可以使用其它限流器类型和尺寸。在一些实现中,可以限制壳体中的空气通道的直径以产生受限的气流。可选的流速传感器185可以是被配置为产生表示流过导管的气体速率的信号的任何传感器。颗粒过滤器187可用于在向用户输送富氧空气之前过滤细菌、灰尘、颗粒等。富氧空气通过过滤器187到达连接器190,连接器190通过输送导管192将富氧空气输送给用户并到达压力传感器194。
131.与供应阀160的编程致动相联接的出口通道的流体动力学可导致在正确的时间提供氧气团,并具有确保快速输送到用户肺中而没有过多废物的振幅分布。
132.膨胀室162可以包括一个或多个氧传感器,其适于确定通过该室的气体的氧气浓度。在一种实现中,使用氧传感器165来估计穿过膨胀室162的气体的氧气浓度。氧传感器是配置为测量气体中氧气浓度的装置。氧传感器的示例包括但不限于超声氧传感器、电氧传感器、化学氧传感器和光学氧传感器。在一种实现中,氧传感器165是包括超声发射器166和超声接收器168的超声氧传感器。在一些实现中,超声发射器166可以包括多个超声发射器,并且超声接收器168可以包括多个超声接收器。在具有多个发射器/接收器的实现中,多个超声发射器和多个超声接收器可以轴向对准(例如,穿过可以垂直于轴向对准的气体流动路径)。
133.在使用中,来自发射器166的超声波可以通过设置在腔室162中的富氧空气被引导到接收器168。超声波氧传感器165可以被配置为检测通过富氧空气的声速以确定富氧空气的成分。声速在氮气和氧气中是不同的,并且在两种气体的混合物中,通过混合物的声速可以是与混合物中每种气体的相对量成比例的中间值。在使用中,接收器168处的声音与从发射器166发出的声音稍微异相。该相移是由于与通过导线的电脉冲的相对较快的速度相比,通过气体介质的声速相对较慢。然后,相移与发射器和接收器之间的距离成比例,并与通过膨胀室162的声速成反比。腔室中气体的密度影响声音通过膨胀腔室的速度,并且密度与膨胀腔室中氧气与氮气的比成比例。因此,相移可用于测量膨胀室中的氧气浓度。以这种方式,蓄积器中的氧的相对浓度可以被估计为通过蓄积器传播的检测到的声波的一个或多个特性的函数。
134.在一些实现中,可以使用多个发射器166和接收器168。来自发射器166和接收器168的读数可以被平均以减少湍流系统中固有的误差。在一些实现中,其他气体的存在还可以通过测量传输时间并且将所测量的传输时间与其他气体和/或气体混合物的预定传输时间进行比较来检测。
135.可以通过增加发射器166和接收器168之间的距离来增加超声传感器系统的灵敏度,例如以允许在发射器166和接收器168之间出现几个声波周期。在一些实现中,如果存在至少两个声音周期,则可以通过在两个时间点测量相对于固定参考的相移来减小转换器的结构变化的影响。如果从较后的相移中减去较早的相移,则可以减小或消除由膨胀室162的热膨胀引起的偏移。由发射器166和接收器168之间的距离变化引起的偏移在测量间隔处可以大致相同,而由于氧气浓度变化引起的变化可以是累积的。在一些实现中,在稍后时间测量的偏移可以乘以居间周期的数目并且与两个相邻周期之间的偏移进行比较。关于感测膨胀室中的氧气的更多细节可以在例如2009年3月12日公开的题为“氧气浓缩器装置和方法(oxygen concentrator apparatus and method)”的美国公开专利申请第2009-0065007号中找到,其通过引用并入本文。
136.流量传感器185可用于确定流过出口系统的气体的流速。可以使用的流速传感器包括但不限于:膜片/波纹管流量计;旋转流量计(例如霍尔效应流量计);涡轮流量计;孔口流量计;以及超声波流量计。流速传感器185可以联接到控制器400。流过出口系统的气体的流速可以是用户的呼吸体积的指示。流过出口系统的气体的流速的变化也可用于确定用户的呼吸率。控制器400可产生控制信号或触发信号以控制供应阀160的致动。这种对供应阀的致动的控制可以基于由流速传感器185估计的用户的呼吸速率和/或呼吸体积。
137.在一些实现中,超声传感器165和例如流速传感器185可以提供对所提供的氧气的实际量的测量。例如,流速传感器185可以测量所提供的气体的体积(基于流速),超声传感器165可以提供所提供的气体的氧气浓度。这两个测量值一起可由控制器400用来确定提供给用户的实际氧气量的近似值。
138.富氧空气通过流速传感器185到达过滤器187。过滤器187在向用户提供富氧空气之前除去细菌、灰尘、颗粒等。过滤后的富氧空气通过过滤器187到达连接器190。连接器190可以是将过滤器187的出口连接到压力传感器194和输送导管192的“y”连接器。压力传感器194可用于监测通过导管192到达用户的气体的压力。在一些实现中,压力传感器194被配置为产生与施加到感测表面的正压力或负压力的量成比例的信号。由压力传感器194感测到的压力变化可用于确定用户的呼吸速率以及吸入的开始(也称为触发时刻),如下所述。控制器400可以基于用户的呼吸速率和/或吸气的开始来控制供应阀160的致动。在一种实现中,控制器400可以基于由流速传感器185和压力传感器194之一或二者提供的信息来控制供应阀160的致动。
139.富氧空气可通过导管192提供给用户。在一种实现中,导管192可以是硅树脂管。导管192可以使用如图7和图8所示的气道输送装置196联接到用户。气道输送装置196可以是能够向鼻腔或口腔提供富氧空气的任何装置。气道输送装置的示例包括但不限于:鼻罩、鼻枕、鼻插、鼻套管和吸嘴。图7中描绘了鼻套管气道输送装置196。气道输送装置196被定位在用户的气道附近(例如,在用户的嘴和/或鼻附近),以允许向用户输送富氧空气,同时允许用户从周围环境呼吸空气。
140.在一个替代实现中,可以使用吸嘴向用户提供富氧空气。如图8所示,吸嘴198可以联接到氧气浓缩器100。吸嘴198可以是用于向用户提供富氧空气的唯一装置,或者吸嘴可以与鼻气道输送装置196(例如鼻套管)结合使用。如图8所示,富氧空气可通过鼻气道输送装置196和吸嘴198提供给用户。
141.吸嘴198可移动地定位在用户的嘴中。在一种实现中,吸嘴198可移除地联接到用户口中的一个或多个牙齿。在使用过程中,富氧空气通过吸嘴被导入用户的口中。吸嘴198可以是模制的夜用防护吸嘴,以符合用户的牙齿。或者,吸嘴可以是下颌复位装置。在一种实现中,至少大部分吸嘴在使用期间位于用户的嘴中。
142.在使用期间,当在吸嘴附近检测到压力变化时,可以将富氧空气引导到吸嘴198。在一种实现中,吸嘴198可以联接到压力传感器194。当用户通过其嘴吸入空气时,压力传感器194可检测吸嘴附近的压降。氧气浓缩器100的控制器400可以控制在吸入开始时向用户释放富氧空气团。
143.在个体的典型呼吸过程中,吸入通过鼻、通过嘴或通过鼻和嘴两者发生。此外,呼吸可以根据各种因素从一个通道改变到另一个通道。例如,在更活跃的活动期间,用户可以
从通过他们的鼻呼吸切换到通过他们的嘴呼吸,或者通过他们的嘴和鼻呼吸。如果停止通过被监测通道的呼吸,则依赖于单一输送模式(鼻或口腔)的系统可能不能正常工作。例如,如果使用鼻套管向用户提供富氧空气,则将吸入传感器(例如,压力传感器或流速传感器)联接到鼻套管以确定吸入的开始。如果用户停止通过他们的鼻子呼吸,并切换到通过他们的嘴呼吸,则氧气浓缩器100可能不知道何时提供富氧空气,因为没有来自鼻套管的反馈。在这种情况下,氧气浓缩器100可以增加流速和/或增加提供富氧空气的频率,直到吸入传感器检测到用户吸入。如果用户经常在呼吸模式之间切换,则提供富氧空气的默认模式可能导致氧气浓缩器100工作更困难,限制了系统的便携式使用时间。
144.在一种实现中,如图8所示,接口198与鼻气道输送装置196(例如,鼻套管)结合使用以向用户提供富氧空气。吸嘴198和鼻气道输送装置196都联接到吸入传感器。在一种实现中,吸嘴198和鼻气道输送装置196联接到同一吸入传感器。在一个替代实现中,吸嘴198和鼻气道输送装置196联接到不同的吸入传感器。在任一实现中,吸入传感器可以检测从嘴或鼻吸入的开始。氧气浓缩器100可被配置为向输送装置(即吸嘴198或鼻气道输送装置196)提供富氧空气,在输送装置附近检测到吸入的开始。或者,如果在任一输送装置附近检测到吸入的开始,则可将富氧空气提供给吸嘴198和鼻气道输送装置196。如图8所示的双输送系统的使用对于用户在睡眠时特别有用,并且可以在鼻呼吸和口呼吸之间切换而无需有意识的努力。
145.控制器系统
146.氧气浓缩器100的操作可以使用联接到氧气浓缩器100的各种部件的内部控制器400自动执行,如本文所述。控制器400包括一个或多个处理器410和内部存储器420,如图2所示。用于操作和监测氧气浓缩器100的方法可以通过存储在内部存储器420或联接到控制器400的外部存储介质中的程序指令来实现,并由一个或多个处理器410执行。存储介质可以包括各种类型的存储装置或储存装置中的任何一种。术语“存储介质”旨在包括安装介质,例如压缩式光盘只读存储器(cd-rom)、软盘或磁带装置;计算机系统存储器或随机存取存储器,例如动态随机存取存储器(dram)、双倍数据速率随机存取存储器(ddrram)、静态随机存取存储器(sram)、扩展数据输出随机存取存储器(edoram)、随机存取存储器(ram)等;或非易失性存储器,例如磁介质,例如硬盘驱动器或光存储器。存储介质也可以包括其它类型的存储器或其组合。此外,存储介质可以位于执行程序的控制器400附近,或者可以位于通过诸如因特网的网络连接到控制器400的外部计算装置中。在后一种情况下,外部计算装置可以向控制器400提供用于执行的程序指令。术语“存储介质”可包括可驻留在不同位置(例如,在通过网络连接的不同计算装置中)的两个或更多个存储介质。
147.在一些实现中,控制器400包括处理器410,处理器410包括例如一个或多个现场可编程门阵列(fpga)、微控制器等,其包括在设置在氧气浓缩器100中的电路板上。处理器410被配置为执行存储在存储器420中的编程指令。在一些实现中,编程指令可以内置到处理器410中,使得处理器410外部的存储器可以不单独访问(即,存储器420可以在处理器410内部)。
148.处理器410可以联接到氧气浓缩器100的各种部件,包括但不限于压缩系统200,用于控制通过系统的流体流的一个或多个阀(例如,阀122、124、132、134、152、154、160)、氧气传感器165、压力传感器194、流速传感器185、温度传感器(未示出)、风扇172,以及可以电控
制的任何其他部件。在一些实施例中,单独的处理器(和/或存储器)可以联接到一个或多个部件。
149.控制器400被配置为(例如,通过程序指令编程)操作氧气浓缩器100,并且还被配置为监测氧气浓缩器100,例如用于故障状态或其它过程信息。例如,在一个实现中,控制器400被编程为如果系统正在操作并且在预定时间量内用户没有检测到呼吸,则触发警报。例如,如果控制器400在75秒的时间段内没有检测到呼吸,则可以点亮警报led和/或可以发出声音警报。如果用户确实停止了呼吸,例如在睡眠呼吸暂停事件期间,警报可能足以唤醒用户,导致用户恢复呼吸。呼吸动作可足以使控制器400重置该警报功能。可替换地,如果当输送导管192从用户移除时系统意外地保持打开,则警报器用作提醒用户关闭氧气浓缩器100。
150.控制器400还联接到氧气传感器165,并可被编程用于连续或定期监测通过膨胀室162的富氧空气的氧气浓度。可以将最小氧气浓度阈值编程到控制器400中,使得控制器点亮led视觉警报和/或听觉警报以警告用户低的氧气浓度。
151.控制器400还联接到内部电源180,并且可以被配置为监测内部电源的充电水平。可以将最小电压和/或电流阈值编程到控制器400中,使得控制器点亮led视觉警报和/或听觉警报以警告用户低功率状态。当电池接近零可用电荷时,可以间歇地并且以增加的频率激活警报。
152.在本公开的其它部分中详细描述了可以由控制器400实现的其它功能。
153.例如,并且如在此包括以下详细部分更详细地讨论的,poc的控制器可以实施压缩机控制以调节系统中的压力。因此,poc可以配备有压力传感器,例如在筛床下游的蓄积器中。poc中的控制器400可以例如在一个或多个模式中使用来自压力传感器以及马达速度传感器的信号来控制压缩机速度的调节。在这点上,控制器可以实现双控制模式,指定为粗压力调节模式和细压力调节模式。粗压力调节模式可以用于在poc的不同流量设定(或“流量设定”)之间改变和用于启动/初始激活。然后,精细压力调节模式可以在粗略压力调节模式的每个操作完成时接管。
154.在粗压力调节模式中,根据操作的先前状态将马达速度设定/控制成上升或下降。在倾斜过程中,控制器使用来自压力传感器的测量结果在筛床中产生传感器上游的估计压力。在一些实现中,在测试中使用估计压力来终止倾斜,例如当估计压力达到在制造时产生的预定压力目标时,该预定压力目标与poc的选定流量设定相关联。可通过使用来自压力传感器的数据执行回归(例如,线性)来计算压力估计值,借此控制器从传感器信号样本确定回归参数(例如,线的斜率和截距参数)。利用回归参数和已知的系统响应延迟来计算压力估计。
155.在精细压力调节模式中,使用来自压力传感器的信号设定/控制马达以维持系统的压力。在完成粗略压力调节模式时,停止马达速度倾斜变化(即,将速度维持在基本速度),并且可以用两个控制器(例如pid(比例、积分、微分)控制器)来替代地实现由粗略模式引起的对基本马达速度的任何进一步改变。在精细压力调节模式期间,将目标压力与合格的压力估计进行比较以产生第一误差信号,该第一误差信号被施加到第一控制器(例如,pid控制器)以通过将pid控制器的pid输出与马达的基本速度求和来产生用于使用第二控制器(例如,pid控制器)控制马达的马达速度设定。使用回归计算第一pid控制器的合格压
力估计。在这点上,来自压力信号的样本可以应用于最佳拟合算法(例如,线性回归)以确定吸附循环期间来自压力信号的数据的回归参数(例如,线的斜率和截距)。如果斜率是正的,则这些参数(斜率和截距,而不是来自压力传感器的压力样本)可以随变压吸附循环的给定吸附阶段的特定时间施加,以从线性回归确定回归线的峰值。如果斜率为负,则可以将截距参数作为峰值。然后,可以将来自回归信息的峰值应用保持最近峰值(例如,六个或更多)的平均值的移动平均缓冲器。然后,平均峰值可以用作控制器的合格压力估计。在2019年9月24日提交的美国临时专利申请第62/904,858号或2020年9月24日提交的专利合作条约申请第pct/au2020/051015号中更详细地讨论了这种方法的形式,其全部公开内容在此引入作为参考。
156.另外,如在此更详细地讨论的,poc的控制器可以被配置为实施团控制以调节系统中的团尺寸,这可以任选地在不使用poc的流速传感器的情况下实现。例如,poc可以配备有压力传感器,例如在筛床下游的蓄积器中,并且作为压力的函数调节由poc产生的团尺寸。这种团尺寸的调节可以是压力和阀定时的函数。这种操作控制的示例在下面例如关于图15、图16、图17和图19更详细地描述。
157.控制面板
158.控制面板600用作用户和控制器400之间的接口,以允许用户启动氧气浓缩器100的预定操作模式并监测系统的状态。图14描绘了控制面板600的实现。用于对内部电源180充电的充电输入端口605可以设置在控制面板600中。
159.在一些实现中,控制面板600可以包括按钮以激活氧气浓缩器100的各种操作模式。例如,控制面板可包括电源按钮610、流量设定按钮620至626、活动模式按钮630、睡眠模式按钮635、高度按钮640和电池检查按钮650。在一些实现中,这些按钮中的一个或多个可以具有相应的led,该led可以在该相应的按钮被按下时点亮,并且可以在该相应的按钮被再次按下时断电。电源按钮610可以打开或关闭系统。如果启动电源按钮以关闭系统,则控制器400可以启动关闭序列以将系统置于关闭状态(例如,两个罐都被加压的状态)。流量设定按钮620、622、624和626允许选择富氧空气的流量(例如,按钮620选择0.2lpm,按钮622选择0.4lpm,按钮624选择0.6lpm,按钮626选择0.8lpm)。高度按钮640可以在用户将要处于比用户定期使用氧气浓缩器100的高度更高的位置时被激活。
160.电池检查按钮650启动氧气浓缩器100中的电池检查例程,这导致控制面板600上的相对电池剩余功率led 655被点亮。
161.如果用户相对不活动(例如,睡着、坐着等),则用户可以具有低呼吸速率或深度,如通过将检测到的呼吸速率或深度与阈值进行比较所估计的。如果相对活动(例如,行走、锻炼等),则用户可以具有高呼吸速率或深度。可以自动估计活动/睡眠模式和/或用户可以通过按下活动模式的按钮630或睡眠模式的按钮635来手动指示活动模式或睡眠模式。
162.操作poc的方法
163.下面描述的操作和监测poc 100的方法可以由诸如控制器400的一个或多个处理器410的一个或多个处理器来执行,所述一个或多个处理器由存储在诸如poc 100的存储器420的存储器中的程序指令来配置,所述程序指令诸如包括如前所述的一个或多个功能和/或与其对应的关联数据。或者,所述方法的一些或所有步骤可类似地由控制器经由收发器430连接到的外部计算装置的一个或多个处理器执行。在后一种实现中,处理器410可以由
存储在poc 100的存储器420中的程序指令来配置,以向外部计算装置发送执行要在外部计算设备处执行的那些步骤所需的测量和参数。
164.氧气浓缩器100的主要用途是向用户提供补充氧气。可以在氧气浓缩器100的控制面板600上选择一个或多个流量设定,然后其将控制操作以根据所选择的流量设定实现富氧空气的产生。在一些形式中,可以实现多个流量设定(例如,五个流量设定)。如在此更详细地描述的,控制器可以实现pod(脉冲氧气输送)或需求操作模式,以调节一个或多个释放的团的尺寸,从而根据选定的流量设定实现富氧空气的输送。
165.为了使输送的富氧空气的效果最大化,控制器400可以被编程为使每个富氧空气团的释放与用户的吸入同步。当用户吸气时将一团富氧空气释放给用户可以通过例如当用户呼气时不释放氧气来防止氧气的浪费。对于在pod模式下操作的浓缩器,控制面板600上的流量设定可以对应于输送氧气的分钟量(团体积乘以每分钟的呼吸速率),例如0.2lpm、0.4lpm、0.6lpm、0.8lpm、1.1lpm。
166.由氧气浓缩器100产生的富氧空气储存在氧气存储器106中,并且在pod模式下,在用户吸气时释放给用户。由氧气浓缩器100提供的富氧空气的量部分地由供应阀160控制。在一种实现中,供应阀160被致动(打开)足够长的时间以向用户提供由控制器400估计的适当量的富氧空气。为了使氧气的浪费最小化,富氧空气可以在检测到用户吸气开始之后立即作为团提供。例如,可以在用户吸入的最初几毫秒内提供富氧空气团。
167.在一种实现中,压力传感器194可用于确定用户吸入的开始。例如,可以通过使用压力传感器194来检测用户的吸气。在使用中,用于提供富氧空气的导管192通过鼻气道输送装置196和/或吸嘴198联接到用户的鼻和/或吸嘴。导管192中的压力因此代表用户的气道压力,并因此指示用户呼吸。在吸入开始时,用户开始通过鼻和/或嘴将空气吸入到他们的身体中。当吸入空气时,在导管192的端部产生负压,部分地由于被抽吸穿过导管端部的空气的文丘里作用。控制器400分析来自压力传感器194的压力信号以检测指示吸入开始的压力下降。在检测到吸入开始时,供应阀160打开以从蓄积器106释放一团富氧空气。压力的正变化或上升指示用户的呼气,此时富氧空气的释放停止。在一种实现中,当感测到正压力变化时,供应阀160关闭,直到检测到下一次吸入开始。可替代地,供应阀160可以在被称为团持续时间的预定间隔之后关闭。通过测量吸入的相邻开始之间的间隔,可以估计用户的呼吸速率。通过测量吸气开始和随后呼气开始之间的间隔,可以估计用户的吸气时间。因此,可以利用来自压力传感器和/或流速传感器的信号来检测用户的呼吸速率或呼吸率。
168.在其他实现中,压力传感器194可以位于与用户气道气动连通但与输送导管192分开的感测导管中。在这种实现中,来自压力传感器194的压力信号因此也表示用户的气道压力。
169.在一些实现中,压力传感器194的灵敏度可能受到压力传感器194距用户的物理距离的影响,特别是如果压力传感器194位于氧气浓缩器100中并且通过将氧气浓缩器100联接到用户的导管192来检测压差时。在一些实现中,压力传感器194可以被放置在用于向用户提供富氧空气的气道输送装置196中。来自压力传感器194的信号可以经由电线或通过遥测技术(例如通过蓝牙
tm
或其它无线技术)电子地提供给氧气浓缩器100中的控制器400。
170.在一些实现中,如果用户的当前活动水平(例如使用检测到的用户的呼吸速率估计的当前活动水平)超过预定阈值,则控制器400可以实现警报(例如,视觉和/或音频)以警
告用户当前呼吸速率正在超过氧气浓缩器100的输送能力。例如,阈值可以设置为每分钟40次呼吸(bpm)。
171.团尺寸调节
172.如前所述,氧气浓缩器可采用保存器或控制器可例如通过以脉冲或按需治疗模式控制富氧空气释放来实现保存器。这可以通过以一系列脉冲的形式输送氧气来实现,其中每个脉冲或“团”可以被定时为与吸气一致。这种模式通常通过在固定时间内致动供应阀160来控制,其中固定时间开始于供应阀160的打开以允许释放团,并且当供应阀160关闭时结束,从而停止释放团。固定时间被校准为与期望或目标团尺寸(例如目标团体积)相关联。然而,这种固定时间过程并不总是实现目标团体积。例如,系统特性如压缩机可变性以及吸附过程(例如,psa循环、筛床条件、空气过滤器条件等)可干扰所输送的团体积。因此,本技术的示例可以提供pod模式中的团释放的改进控制,以允许释放的团尺寸的更大一致性和/或准确性。如在此更详细地讨论的,可以用动态定时参数(例如,定时阈值)而不是固定时间来实现团释放控制,该动态定时参数可以考虑在团释放期间改变的系统条件,使得团控制可以更准确地实现期望的尺寸。因此,用于停止团释放的定时阈值可以在团释放期间根据系统条件(例如,压力)而改变。这种技术的示例可以结合图15到图17和图19更详细地理解。例如,团的释放可以通过控制器应用来自压力传感器(例如蓄积器压力传感器)的测量压力信号的值的函数来实现,以获得团的阀打开的目标持续时间。控制器可以例如利用该函数动态地确定、计算(或重新计算)团释放期间的目标持续时间。此外,该函数可以包括模型压力-时间-体积表面的一个或多个参数(例如,经验常数),该模型压力-时间-体积表面是从利用测量压力、团体积和阀致动时间的校准过程导出的。这种模型化表面的参数可以任选地通过最佳拟合过程(例如利用校准测量的回归)导出。
173.可以结合图15的流程图考虑这种动态控制的团释放的示例,其示出了可以由poc 100的控制器400实现的方法1500。在1502处,控制器可以评估来自传感器(例如,压力传感器194)的指示用户呼吸的信号(例如,检测吸气的开始)以检测吸气特征,所述传感器被配置为产生指示呼吸的信号。如前所述,这可以包括检测与用户吸气的开始相关的压力下降。响应于指示呼吸的信号(例如,基于压力下降的这种检测),在1504处,控制器可以打开供应阀160以启动团的释放。在1506处,控制器然后可以在团释放期间监测一个或多个系统特性,诸如对蓄积的富氧空气的压力的测量。例如,控制器可以确定或更新平均蓄积器压力,例如通过对来自蓄积器压力传感器107的信号的样本求和,其中该平均特别涉及团释放的周期,即当供应阀打开用于团释放时。在1508处,控制器然后可以计算(或重新计算)用于致动供应阀160的定时阈值(例如,目标持续时间)以便确定它何时可以被关闭。定时阈值可以被确定或计算以实现目标或期望的团尺寸,并且可以基于测量压力(例如,平均压力)和/或基于体积、压力和阀打开时间的模型化表面,诸如使用在此更详细描述的函数。在1510处,控制器可以将所计算的定时阈值与对应于供应阀160已经打开以用于释放团的时间量的经过的时间(例如,经过的时间》目标持续时间和/或经过的时间=目标持续时间)进行比较,该经过的时间例如来自定时器。基于该比较(例如,“是”),控制器可以在1512继续关闭供应阀以停止团释放,诸如如果已经达到目标持续时间。可替代地,基于该比较(例如,“否”),该控制器可以返回到监测该系统特性以便在该供应阀160保持打开时用来自蓄积器压力传感器的额外样本来更新该平均压力,这样使得该过程重复1506、1508和1510。这种重复允许动
态调节定时阈值。随着供应阀在1512处的关闭,根据期望的体积已经释放团,并且过程1500可以返回到1502。
174.在一些实现中,通过由步骤1506、1508和1510形成的循环的迭代速率足够快,使得所得到的供应阀打开时间的分辨率足以允许团尺寸可靠地接近目标尺寸。例如,迭代速率可以是1000赫兹(hz),给予供应阀打开时间
±
0.5毫秒(ms)的分辨率。对于150毫秒(ms)的典型供应阀打开时间,这表示精度小于1%。在一些实现中,不是步骤1506的每次迭代都提供压力的更新测量。在这样的实现中,可以在步骤1506的迭代中使用先前的压力测量,其中压力测量未被更新。
175.因此,在如先前所讨论的这些示例中的一些中,控制器可以实现用于控制团的释放的函数,使得团被调节以实现期望的团尺寸,例如体积。该函数可以包括使用模型化系数的模型化表面。模型化表面可以例如在校准过程中凭经验导出。该函数可以被导出以将压力(例如,平均压力)和阀打开时间映射到团尺寸,例如对于便携式氧气浓缩器100的一个或多个流量设定,并且可以包括一个或多个模型化系数(经验常数)。关于图16可以考虑适用于本技术的一些形式的示例函数。图16绘制了表示在团输送期间的平均压力和供应阀打开时间与输送的团体积相关的经验确定值的点。如图所示,每组点1640-1、1640-2、1640-3、1640-4、1640-5可以相对于便携式氧气浓缩器100的不同供应阀打开时间来确定。利用由poc输送的团体积的测量值(在图16中显示为点),可以从数据导出模型化表面或将其拟合到数据,例如通过回归或最佳拟合分析,以导出表面的参数(例如,模型化系数或常数)。在使用一系列团体积的压力和阀打开时间的示例中,数据的适当函数可以如下:
176.bolussize=a*p+b*p*ftime+c*ftime+d
ꢀꢀꢀ
等式1
177.其中:
178.bolussize是以毫升为单位的团的体积;
179.p是测量压力的值,例如团释放期间的平均压力,或初始团释放时的压力测量值;
180.f
time
是在团释放期间供应阀打开的持续时间或时间段;以及
181.a、b、c和d是从应用于图16所示的校准过程测量的表面拟合过程导出的经验常数。因此,模型化表面可以是双线性或其它合适的形状。可以单独地对每个poc 100进行校准,在这种情况下,经验常数对于每个poc可以是不同的,或者对于代表具有类似出口气动特性的多个poc的单个poc,在这种情况下,多个poc可以共享一组共同的经验常数。
182.所导出的函数然后可以被编程到控制器中,用于在pod模式中调节团尺寸。例如,如关于本文中的示例所讨论的,该函数可以应用于通过对等式1的等式求逆来动态确定或计算用于输送期望尺寸的团的定时阈值(例如,目标持续时间)以获得以下函数:
[0183][0184]
其中:
[0185]
targetduration是可以实现为团输送的定时阈值的目标持续时间(即,从团开始到团结束的供应阀打开时间或团释放的经过的时间);
[0186]
targetbolussize是目标团体积,例如与用户的呼吸速率和poc的流量设定相关联的目标体积;
[0187]
p为团释放期间测量压力的值,对应于校准期间使用的测量压力的值,例如团释放
期间的平均压力;以及
[0188]
a、b、c和d是来自模型化表面的经验常数。在一些实现中,这些常数的确定的集合可以与氧气浓缩器的每个流量设定相关联。因此,当控制器在pod模式中应用该函数时,控制器可以访问与poc的当前应用的流量设定相关联的常数的特定集合。因此,控制器可以具有用于表面的经验常数的多个离散集合,其分别与氧气浓缩器的不同流量设定相关联。在一些这样的实现中,经验常数的每个离散集合与一组流量设定相关联,例如流量设定1至3。这种相关联的组可以包括一个或多个流量设定。在其他实现中,可以导出经验常数的单个集合并将其应用于所有流量设定。
[0189]
在可替换的实现中,该函数可以基于具有不同参数的其它模型化表面,以适合于在校准期间获取的数据。一种这样的替代实现使用二阶模型化表面,其被定义为:
[0190]
bolussize=a*p2*ftime+b*p2+c*p*ftime+d*ftime
ꢀꢀꢀ
等式3
[0191]
如前所述,这样的函数可以在poc控制器(例如,控制器400)中实现,以动态地调节团释放持续时间以实现期望的团尺寸。举例来说,poc的控制器可被配置为实现状态机,所述状态机用于实现pod操作模式以动态地调节一个或多个团到所需体积的释放。可以关于图17的状态图来考虑这种状态机1700的示例。用于调节团尺寸(例如,体积)的控制器可以配置有空闲状态1702、开始状态1704、团估计状态1706和停止状态1708中的任何一个、多个或全部。在空闲状态1702中,控制器400可以被配置为检测或评估用户吸气的特性,例如来自指示患者呼吸的信号。可选地,处于空闲状态1702的控制器可以等待用于开始团释放的触发信号。
[0192]
如前所述,在检测到用于激活团释放的条件时,控制器可以从空闲状态1702转换到开始状态1704。在状态机1700中,控制器可以操作定时器以确定自供应阀打开以来经过的时间。为此,控制器可以在转换到开始状态1704时初始化定时器。可选地,在使用压力信号的值例如平均压力的情况下,控制器可以将平均压力的值初始化为例如零。在开始状态1704中,控制器还可以确定或计算目标团尺寸。例如,目标团尺寸可以确定为poc的当前流量设定(例如,分钟量)和用户的当前呼吸速率的函数。如前所述,这种呼吸速率可以用诸如压力传感器194的呼吸传感器来确定。在该示例中,可以通过将分钟量除以呼吸速率(例如,以每分钟呼吸(bpm)计)来确定目标团尺寸。
[0193]
在一些实现中,可以根据当前呼吸速率来调节与当前流量设定相关联的分钟量vm。在一种这样的实现中,可以与当前呼吸速率偏离参考呼吸速率(例如20bpm)的量成比例地调节分钟量vm。然后可以通过将调节的分钟量除以当前呼吸速率来确定目标团尺寸。在一个这样的实现中,调节后的分钟量可以被计算为
[0194][0195]
其中bpm
ref
是参考呼吸速率,并且k是比例常数。例如,如果k是正的,则当患者以快于参考呼吸速率的速率呼吸时,该调节的效果是减小目标团尺寸。
[0196]
然后,在开始状态1704中,控制器400可以产生信号以打开供应阀160。然后,定时器可以开始递增,以建立从该信号产生开始的经过的时间。然后,控制器可以开始对测量压力的样本求和,例如对来自蓄积器压力传感器107的测量压力的样本求和,以确定求和样本的平均值。因此,控制器可以保持用于计算平均值的样本的累积总和和总数。控制器在开始
状态1704中的这些保持操作可以持续预定的最小时间段。在这点上,一旦从供应阀160打开用于团的经过的时间超过最小时间段,例如通过比较定时器的经过的时间和表示最小时间段的阈值,控制器可以从开始状态1704转换到团估计状态1706。因此,在从开始状态1704到团估计状态1706的转换处,平均压力的计算可能已经进行了最小时间段,并且供应阀可能已经打开了该最小时间段。换言之,控制器至少制止关闭供应阀直到经过的时间达到或超过最小时间段。
[0197]
在团估计状态1706中,控制器将供应阀160保持在打开状态。此外,当处于团估计状态时,控制器可以继续使用测量压力的样本来重复地更新平均压力。为此,可以重复地将压力样本与累积总和相加,然后将其除以样本的总数。控制器然后可以动态地确定或计算目标持续时间(定时阈值),例如通过使用测量压力的值的函数(例如等式2),例如在供应阀打开时确定的平均压力,用于释放团(例如,从起始状态1704和团估计状态1706的组合),以便确保释放适当的团尺寸。然后,控制器可以将目标持续时间与在开始状态1704中初始化的定时器的经过的时间进行比较。当经过的时间等于或超过动态确定的目标持续时间时,控制器可以转换到停止状态1708,从而确保释放期望的团尺寸。在这点上,在团估计状态1706中,控制器可以重复地更新平均压力和目标持续时间,用于重复比较,直到当达到目标持续时间时转换到停止状态1708。可选地,如果经过的时间超过最大时间,控制器也可以转换到停止状态1708。在停止状态1708中,控制器关闭供应阀160以停止团释放,例如通过中断用于打开供应阀160的信号。然后,控制器可以转换到空闲状态1702,以等待下一个周期用于团释放。
[0198]
用于调节团尺寸的控制器的这些示例过程可以改善氧气治疗随时间的一致性。这种一致性可以相对于图18和图19的曲线图来考虑。这些图各自示出了随时间变化的团尺寸(在这种情况下的体积)的轨迹。图18示出了利用固定定时阈值的poc的操作。如图所示,轨迹1802随时间的变化示出了具有这种阀控制的poc可以产生不一致的团尺寸,这可能是系统特性变化的结果。图19示出了利用动态确定的目标持续时间来控制如在前述示例中描述的供应阀的poc的操作,例如在调节团尺寸中使用平均压力。如在具有与图18相同的垂直比例的图19的曲线图中看到的,轨迹1902随时间的变化示出具有这种阀控制的poc可以产生团尺寸的更大一致性,而不管系统特性的变化。
[0199]
在一些实现中,可以实现根据状态机1700计算的阀打开时间以补偿可能使所输送的团尺寸偏离所希望的团尺寸的一个或多个影响。一种这样的效应是温度。如果富氧气体的温度与校准期间产生模型化的压力-时间-体积表面的经验常数的温度显著不同,则对于给定的平均压力和供应阀打开时间,模型化表面将是团粒尺寸的较不精确的预测器。
[0200]
为了补偿系统温度,可以通过如前所述的温度传感器来测量出口系统中(例如蓄积器106内部)的气体温度。可以将函数应用于测量的温度和目标团尺寸(例如,在状态机1700的开始状态1704期间)以产生温度调节的目标团尺寸。在这种温度调节的一个实现中,目标团体积可以与绝对温度相对于执行校准时存在的温度的变化成比例地变化。例如,由于执行了校准,目标团体积可以与绝对温度的增加成比例地增加。然后在步骤1508,可以通过应用使用温度调节的目标团尺寸的函数来计算定时阈值。
[0201]
术语表
[0202]
为了实现本技术公开内容的目的,在本技术的某些形式中可应用下列定义中的一
个或多个。本技术的其他形式中,可应用另选的定义。
[0203]
空气:在本技术的某些形式中,空气可以是指由78%氮气(n2)、21%氧气(o2)和1%水蒸气、二氧化碳(co2)、氩气(ar)和其它痕量气体组成的大气空气。
[0204]
富氧空气:氧气浓度大于大气空气(21%)的空气,例如至少约50%氧气、至少约60%氧气、至少约70%氧气、至少约80%氧气、至少约90%氧气、至少约95%氧气、至少约98%氧气或至少约99%氧气。“富氧空气”有时被缩短为“氧气”。
[0205]
医用氧气:医用氧气定义为氧气浓度为80%或更高的富氧空气。
[0206]
环境:在本技术的某些形式中,术语环境可具有以下含义(i)治疗系统或用户的外部,和(ii)直接围绕治疗系统或用户。
[0207]
流量:每单位时间输送的空气体积(或质量)。流量可以指瞬时量。在一些情况下,对流量的参考将是对标量的参考,即仅具有量值的量。在其他情况下,对流量的参考将是对向量的参考,即具有量值和方向两者的量。流量可以符号q给出。“流量”有时简单地缩写成“流”或“空气流”。
[0208]
患者:人,不论他们是否患有呼吸障碍。
[0209]
压力:每单位面积的力。压力可以表达为单位范围,包括cmh2o、g-f/cm2、百帕斯卡。1cmh2o等于1g-f/cm2且约为0.98百帕(1百帕=100pa=100n/m2=1毫巴~0.001大气压)。在本说明书中,除非另有说明,否则压力以cm h2o为单位给出。
[0210]
一般注解
[0211]
这里使用的术语“联接”是指一个或多个对象或部件之间的直接连接或间接连接(例如,一个或多个中间连接)。短语“连接”是指对象或部件之间的直接连接,使得对象或部件彼此直接连接。如本文所用,短语“获得”装置是指购买或构造所述装置。
[0212]
在本公开中,某些美国专利、美国专利申请和其它材料(例如,制品)已通过引用并入本文。然而,这样的美国专利、美国专利申请和其他材料的正文仅在这样的正文与本文阐述的其他陈述和附图之间不存在冲突的程度上通过引用并入本文。在这种冲突的情况下,在通过引用并入本文的美国专利、美国专利申请和其它材料中的任何这种冲突的文本没有具体地通过引用并入本文。
[0213]
鉴于本说明书,本技术的各个方面的进一步修改和替代实现对于本领域技术人员而言是显而易见的。因此,本说明书应被解释为仅是说明性的,并且用于教导本领域技术人员实现该技术的一般方式。应当理解,在此示出和描述的技术的形式被视为实现。可以用元件和材料代替本文所示和所述的那些元件和材料,可以颠倒部分和方法,并且可以独立地利用本技术的某些特征,所有这些对于受益于本技术说明书的本领域技术人员来说是显而易见的。在不脱离所附权利要求中描述的技术的精神和范围的情况下,可以对这里描述的元件进行改变。
[0214]
标签列表
[0215]
氧气浓缩器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
[0216]
冷却系统被动入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
[0217]
空气入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105
[0218]
蓄积器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
106
[0219]
蓄积器压力传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
107
[0220]
消音器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
108
[0221]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
[0222]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
[0223]
过滤器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
129
[0224]
出口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
130
[0225]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
[0226]
消音器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
133
[0227]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
134
[0228]
挡板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
139
[0229]
止回阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
142
[0230]
止回阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
144
[0231]
限流器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
151
[0232]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
152
[0233]
限流器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
153
[0234]
阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
154
[0235]
限流器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
155
[0236]
供应阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
160
[0237]
膨胀室
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
162
[0238]
氧传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
165
[0239]
发射器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
166
[0240]
超声接收器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
168
[0241]
外壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
170
[0242]
风扇
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
172
[0243]
出口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
173
[0244]
出口端口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
174
[0245]
限流器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
175
[0246]
电源
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
180
[0247]
流量传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
185
[0248]
颗粒过滤器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
187
[0249]
连接器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
190
[0250]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
192
[0251]
压力传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
194
[0252]
鼻气道输送装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
196
[0253]
吸嘴
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
198
[0254]
压缩系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
[0255]
速度传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201
[0256]
压缩机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210
[0257]
压缩机出口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212
[0258]
马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
220
[0259]
外部电枢
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
230
[0260]
空气传送装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
240
[0261]
压缩机出口导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
250
[0262]
罐系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
[0263]
罐
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302
[0264]
罐
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
304
[0265]
空气入口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
306
[0266]
壳体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310
[0267]
基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
315
[0268]
阀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
322
[0269]
开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
323
[0270]
阀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
324
[0271]
出口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
325
[0272]
气体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
327
[0273]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
330
[0274]
阀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
332
[0275]
孔口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
337
[0276]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
342
[0277]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
344
[0278]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
346
[0279]
开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
375
[0280]
控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400
[0281]
处理器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410
[0282]
存储器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
420
[0283]
收发器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
430
[0284]
壳体部件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
510
[0285]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
530
[0286]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
532
[0287]
导管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
534
[0288]
链接开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
542
[0289]
开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
544
[0290]
阀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
552
[0291]
阀座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
554
[0292]
控制面板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
600
[0293]
输入端口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
605
[0294]
电源按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
610
[0295]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
620
[0296]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
622
[0297]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
624
[0298]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
626
[0299]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
630
[0300]
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
635
[0301]
高度按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
640
[0302]
电池检查按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
650
[0303]
led
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
655
[0304]
方法
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1500
[0305]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1502
[0306]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1504
[0307]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1506
[0308]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1508
[0309]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1510
[0310]
步骤
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1512
[0311]
点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1640-1
[0312]
点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1640-2
[0313]
点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1640-3
[0314]
点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1640-4
[0315]
点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1640-5
[0316]
状态机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1700
[0317]
空闲状态
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1702
[0318]
开始状态
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1704
[0319]
团估计状态
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1706
[0320]
停止状态
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1708
[0321]
轨迹
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1802
[0322]
轨迹
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1902
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1