球囊导管的控制手柄、球囊导管及冷冻消融系统的制作方法
[0001]
本发明涉及医疗器械技术领域,尤其涉及一种球囊导管的控制手柄、球囊导管及冷冻消融系统。
背景技术:
[0002]
心房颤动(atrial fibrillation,简称房颤)是临床最常见的心律失常之一,其发病率随着年龄增长而升高,与同年龄非房颤患者相比较,房颤患者生活质量往往较差,且常伴随有高血压、心力衰竭等疾病,故其血栓栓塞并发症及致死均较高。为了解决这一难题,一种消融方式—冷冻球囊消融手术(cryoballoon ablation)开始在临床上得到应用。用于治疗心房颤动的冷冻球囊消融手术已经经过多次的临床试验研究,证实其与射频消融技术具有同样的安全性和有效性,并且具有更少的并发症,从而得以在临床应用中快速的被接纳。
[0003]
与传统的射频消融手术不同,冷冻球囊消融手术是将球囊堵至肺静脉前庭,将过低温能量传递至球囊周围的心脏组织,从而对球囊周边心脏组织造成直接或间接的损伤,以在心脏内的特定位置处形成永久性的电传导阻断,进而达到肺静脉电隔离的目的。
[0004]
目前,实施冷冻球囊消融手术的设备在使用的各个环节没有指示装置,需要助手读取设备屏幕上的内容,并转述给术者,延长了术者指令发送时间,可能造成消融过度或消融不够或操作错误等隐患。
[0005]
冷冻球囊消融手术的设备包括冷冻球囊控制手柄,冷冻球囊控制手柄上设置一推送延伸件的推钮,在冷冻球囊消融手术过程中还会出现术者无法或遗忘推送延伸件推钮,导致球囊在患者体内无法伸直,无法顺利进入鞘管内,导致球囊无法安全取出的问题。
技术实现要素:
[0006]
本发明的目的在于提供一种球囊导管的控制手柄能够自动控制延伸件移动,以控制球囊的收缩状态,并确保球囊在患者体内伸直,以使球囊顺利回撤到鞘管内,改善手术的安全性。
[0007]
为了达到上述目的,本发明提供了一种球囊导管的控制手柄,所述球囊导管包括外管、至少部分位于所述外管内的延伸件和球囊,所述球囊的近端与所述外管的远端连接,所述球囊的远端与所述延伸件的远端连接,所述延伸件与所述外管能够沿轴向相对移动,所述球囊导管的控制手柄包括:推动单元,与所述延伸件固定连接,用于带动所述延伸件沿轴向移动;驱动单元,与所述推动单元相连,用于驱动所述推动单元;控制单元,其接收控制信号控制所述驱动单元的操作。
[0008]
可选的,所述推动单元包括滑轨及滑动设置于所述滑轨上的滑块,所述滑块与所述延伸件固定相连,所述滑轨沿所述延伸件的轴向设置,所述驱动单元驱动所述滑块运动。
[0009]
可选的,所述驱动单元包括气缸,所述气缸与所述滑块相连。
[0010]
可选的,所述推动单元包括传动齿条,所述传动齿条与所述延伸件固定相连且沿所述延伸件轴向延伸,所述驱动元件驱动所述传动齿条运动。
[0011]
可选的,所述驱动单元包括电机、传动轴和传动齿轮,所述传动齿轮与所述传动齿条啮合,所述传动轴的一端连接所述电机的输出轴,另一端连接所述传动齿轮。
[0012]
可选的,所述球囊的控制手柄还包括限位件,所述电机的输出轴上设置有主动件,所述传动轴的所述一端设置有从动件,所述传动轴穿过所述传动齿轮的所述另一端设置有传动件及离合开关,所述传动件与所述离合开关相连,所述限位件能够限制所述传动件转动;所述传动件与所述传动轴转动连接,且能带动所述传动轴沿所述传动齿轮的轴向移动,所述离合开关能够带动所述传动件沿所述传动齿轮的轴向移动,使得所述主动件与所述从动件紧贴或脱离。
[0013]
可选的,所述离合开关与所述传动件螺纹连接,在所述限位件的作用下,通过转动所述离合开关带动所述传动件沿所述传动齿轮的轴向移动。
[0014]
可选的,所述球囊的控制手柄还包括推钮,所述推钮与所述传动齿条固定相连,用于在所述主动件与所述从动件脱离时带动所述传动齿条移动。
[0015]
可选的,所述传动齿条上设置有限位块,用于限制所述传动齿条的位移量。
[0016]
可选的,所述控制信号包括球囊温度信息、推动单元位置信息、球囊位置信息中的至少一个。
[0017]
可选的,当所述球囊温度信息达到预设的温度阈值时,所述控制单元控制所述驱动单元,以推动所述推动单元。
[0018]
可选的,当所述推动单元的位置信息和所述球囊的位置信息均达到预设的位置阈值时,所述控制单元控制所述驱动单元,以停止推动所述推动单元。
[0019]
可选的,所述球囊的控制手柄还包括指示单元,用于实时指示所述球囊导管的状态。
[0020]
可选的,所述控制单元依据所述推动单元位置信息和所述球囊位置信息判断所述球囊的状态,并实时向所述指示单元发出指示信号。
[0021]
可选的,所述指示单元包括:指示灯,根据所述指示信号发出特定颜色和/或时长的光线;发光元件,用于增强所述指示灯发出的光线;光罩,包裹所述指示灯及所述发光元件。
[0022]
此外,本发明还提供了一种球囊导管,包括所述球囊的控制手柄、所述外管、所述延伸件和所述球囊。
[0023]
可选的,所述球囊导管还包括温度检测模块,用于实时检测所述球囊的温度信息,并将所述温度信息传输给所述控制单元。
[0024]
可选的,所述球囊导管还包括位置检测模块,用于实时检测所述推动单元和/或球囊的位置信息,并将所述位置信息传输给所述控制单元。
[0025]
当所述控制单元同时接收到推动单元和球囊的位置信息时,所述控制单元向所述驱动单元输出停止信号;当所述控制单元未同时接收到推动单元和球囊的位置信息时,所述控制单元输出报警
信号并同时向所述驱动单元输出停止信号。
[0026]
可选的,所述球囊导管包括外管、至少部分位于所述外管内的延伸件、球囊和控制手柄,其特征在于,所述球囊的近端与所述外管的远端连接,所述球囊的远端与所述延伸件的远端连接,所述延伸件与所述外管能够沿轴向相对移动,所述控制手柄与所述外管的近端连接,其中,所述控制手柄包括:推动单元,与所述延伸件固定连接,用于带动所述延伸件沿轴向移动;指示单元,用于实时指示所述球囊导管的状态;控制单元,其接收控制信号控制所述指示单元的指示。
[0027]
可选的,所述指示单元包括:指示灯,根据所述控制信号发出特定颜色和/或时长的光线;发光元件,用于增强所述指示灯发出的光线;光罩,包裹所述指示灯及所述发光元件。
[0028]
可选的,所述控制信号包括球囊温度信息、推动单元位置信息、球囊位置信息中的至少一个。
[0029]
此外,本发明还提供了一种冷冻消融系统,包括所述的球囊导管。
[0030]
在本发明提供的一种球囊导管的控制手柄中,所述推动单元与所述延伸件固定相连,用于带动所述延伸件沿轴向移动。所述驱动单元与所述推动单元相连,用于带动所述推动单元,控制单元其接收控制信号控制所述驱动单元的驱动状态。进而控制所述球囊的收缩状态。球囊导管的控制手柄能够自动带动所述延伸件沿轴向移动,在完成后冷冻消融后,自动推送延伸件移动以使所述球囊在患者体内充分延展伸直,以使所述球囊能够顺利回撤到鞘管内,同时,也避免了所述球囊在人体内多次反复推送或抽真空,对非靶组织的损伤风险降到最低,改善手术的安全性。
[0031]
此外,所述球囊导管的控制手柄与所述球囊导管的近端相连,所述球囊导管的远端设置有球囊,所述位置检测模块能够检测所述球囊的位置信息,所述控制单元根据所述球囊位置信息。可以进一步确定所述球囊的收缩状态。防止球囊未充分延展伸直的状态下被回撤到鞘管内,进而导致球囊回收失败。
[0032]
此外,球囊导管的控制手柄还包括指示单元,用于实时显示球囊的状态。如此,可以方便术者实时了解手术进展情况,防止因手术情况的信息传递延时,造成消融过度、消融不够或操作错误等问题,降低手术风险。
[0033]
相应的,本发明还提供了一种冷冻消融系统。
附图说明
[0034]
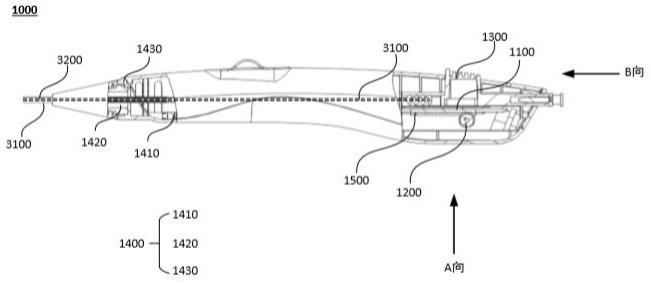
图1为本发明实施例中的实施例中的一种冷冻消融系统的结构示意图;图2为本发明实施例中的球囊导管的控制手柄的结构示意图;图3为本发明实施例中的球囊导管的控制手柄的a向局部视图;图4为本发明实施例中的球囊导管的控制手柄的b向局部视图;图5为本发明实施例中的传动轴的剖视图;图6为本发明实施例中的控制单元的信息流示意图;其中,附图标记如下:
1000-球囊导管的控制手柄;1100-推动单元;1110-传动齿条;1200-驱动单元;1210-电机;1211-主动件;1220-传动轴;1221-从动件;1230-传动齿轮;1240-传动件;1241-第一传动件;1242-第二传动件;1300-推钮;1400-指示单元;1410-指示灯;1420-发光元件;1430-光罩;1500-第一位置传感器:1600-离合开关:2000-鞘管;3000-球囊导管;3100-延伸件;3200-外管;3300-内管;4000-球囊。
具体实施方式
[0035]
下面将结合示意图对本发明的具体实施方式进行更详细的描述。根据下列描述,本发明的优点和特征将更清楚。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。
[0036]
本文中“近端”和“远端”的定义为:“近端”通常指该医疗设备在正常操作过程中靠近操作者的一端,而“远端”通常是指该医疗设备在正常操作过程中首先进入患者体内的一端。
[0037]
用于治疗心房颤动的冷冻球囊消融手术具有较高的安全性和有效性,而且还具有较少的并发症,使得冷冻球囊消融手术得以在临床应用中快速的被接纳。在冷冻球囊消融手术中,通过一个球囊堵至肺静脉前庭,之后向所述球囊内充入低温流体,所述球囊内的低温流体将低温能量传递至所述球囊周围,从而对所述球囊周边心脏组织造成直接或间接的损伤,在心脏内的特定位置处必须形成永久性的电传导阻断。进而达到肺静脉电隔离的目的。由冷冻球囊消融手术形成的消融灶的永久性都是最重要的。靶组织必须被完全且永久性地影响,这防止被治疗的病症的复发。在包括心房颤动(af)的某些形式的心律失常的处理中,因此,必须形成连续的透壁消融灶,从而确保靶组织中的所有心肌细胞都被破坏。具体地,通过若干机制由冷冻性损伤快速杀死肌细胞,这些机制可包括由于结冰、渗透压失衡、脱水、线粒体损害和凋亡过程延迟导致的细胞膜破裂。冷冻消融技术是基于冷冻消融系统而实施的一种手术。
[0038]
图1为本实施例中的一种冷冻消融系统的结构示意图。如图1所示,所述冷冻消融系统包括球囊导管3000及鞘管2000,所述球囊导管3000包括球囊导管的控制手柄1000、球囊4000、外管3200、内管3300和延伸件3100。所述球囊导管的控制手柄1000位于所述球囊导管3000的近端,所述外管3200套设于所述内管3300及延伸件3100外,且所述延伸件3100与所述外管3200能够沿轴向相对移动。所述球囊导管3000套置在所述鞘管2000内,所述鞘管2000内设置有供球囊4000及球囊导管3000穿过的通道。所述球囊4000的远端与所述延伸件3100的远端固定相连,所述球囊4000的近端与所述外管3200的固定相连,所述球囊导管的控制手柄1000控制所述延伸件3100沿轴向移动,以控制球囊4000的收缩状态。
[0039]
球囊4000的远端通过胶水粘接或焊接的方式固定于延伸件3100远端,球囊4000的近端通过胶水粘接或焊接的方式固定于外管3200的远端,所述延伸件3100和所述外管3200可在轴向相对移动。由于所述球囊4000径向尺寸小于轴向尺寸(呈椭圆形),在没有注入填充流体时,通过推送所述延伸件3100可将所述球囊4000充分延展以降低外径,有利于所述球囊4000穿过鞘管2000内的通道。所述球囊4000处于收缩状态时,由于所述延伸件3100远
端与所述球囊4000固定相连,若所述延伸件3100移动的位移量不够,将会导致所述球囊4000未充分延展而起褶皱,这将造成收缩状态下的球囊4000的外径较大,不利于所述球囊4000穿过鞘管2000内的导丝通道,继而导致球囊4000无法被安全取出,这是我们不希望的。
[0040]
所述球囊导管的控制手柄1000还包括推钮1300和推动单元1100,所述推动单元1100与所述延伸件3100固定相连,用于带动所述延伸件3100沿轴向移动,所述推钮1300与所述推动单元1100固定相连,能够带动所述推动单元1100移动,继而带动所述延伸件3100沿轴向移动以控制所述球囊4000的收缩状态。
[0041]
目前的冷冻消融系统中,若术者在消融手术后遗忘推送推钮1300,导致延伸件3100没有拉伸球囊400,继而导致所述球囊4000未在患者体内充分延展伸直,球囊4000可能无法顺利进入鞘管2000内,最终导致球囊4000无法被安全取出。
[0042]
基于此,本发明提供了一种球囊导管的控制手柄1000,能够自动控制延伸件3100移动,以控制球囊4000的在患者体内充分延展伸直,确保球囊4000收缩后能够顺利回撤到鞘管2000内,改善手术的安全性。
[0043]
图2为本实施例中的球囊导管的控制手柄的结构示意图。如图2所示,所述球囊导管的控制手柄1000用于控制套置于所述外管3200内的延伸件3100沿轴向移动,以控制球囊4000的收缩状态,所述球囊导管的控制手柄1000包括推动单元1100、驱动单元1200、和控制单元。其中,所述推动单元1100与所述延伸件3100固定相连,用于带动所述延伸件3100沿轴向移动。所述驱动单元1200,与所述推动单元1100相连,用于驱动所述推动单元1100。所述控制单元,根据接收控制信号控制所述驱动单元1200的驱动状态。
[0044]
所述控制信号包括球囊温度信息、推动单元位置信息、球囊位置信息中的至少一个。当所述球囊温度信息达到预设的温度阈值时,所述控制单元控制所述驱动单元1200,以推动所述推动单元1100。当所述推动单元位置信息或所述球囊位置信息达到预设的位置阈值时,所述控制单元控制所述驱动单元1100,以停止推动所述推动单元1100。优选的,当所述推动单元位置信息和所述球囊位置信息均达到预设的位置阈值时,所述控制单元控制所述驱动单元,以停止推动所述推动单元。
[0045]
所述球囊导管3000还包括温度检测模块,用于实时检测所述球囊的温度信息,并将所述温度信息传输给所述控制单元。所述球囊导管还包括位置检测模块,用于实时检测所述推动单元位置信息和/或球囊位置信息,并将所述推动单元位置信息和/或球囊位置信息传输给所述控制单元。
[0046]
具体的,所述温度检测模块包括温度传感器,所述温度传感器位于所述球囊导管3000的远端,用于获取球囊温度信息。
[0047]
所述位置检测模块包括第一位置传感器1500,所述第一位置传感器1500设置于球囊导管的控制手柄1000内,用于获取推动单元位置信息。优选的,所述位置检测模块还包括第二位置传感器,设置于所述球囊导管3000的远端,用于获取球囊位置信息。
[0048]
进一步的,用于检测所述球囊位置信息的第二位置传感器设置于所述球囊导管3000的远端,所述第二位置传感器将检测结果发送至所述控制单元中。应知道,通过推动单元1100的位置以确定延伸件3100的移动情况,进而确定所述球囊4000是否在患者体内充分延展伸直,可能会存在误判的情况发生。为了保证球囊4000在患者体内充分延展伸直,以确保使球囊4000顺利回撤到鞘管2000内,在所述球囊导管3000的远端设置第二位置传感器,
通过获取球囊位置信息。结合传动齿条1110上的第一位置传感器获取的推动单元位置信息,控制单元可以更加准确的判定所述球囊4000是否在患者体内充分延展伸直。
[0049]
本发明的球囊导管的控制手柄1000能够自动带动所述延伸件3100沿轴向移动,在完成冷冻消融后,驱动单元1200自动推送延伸件3100移动以使所述球囊4000在患者体内充分延展伸直,以使所述球囊4000能够顺利回撤到鞘管2000内,同时,也避免了所述球囊4000在人体内多次反复推送或抽真空,对非靶组织的损伤风险降到最低,改善手术的安全性。
[0050]
应理解,第一位置传感器1500和控制单元通过推动单元1100的位置以确定延伸件3100的移动情况,进而确定所述球囊4000的收缩状态。当所述延伸件3100向远端移动一设定距离,所述第一位置传感器1500反馈一检测信号,则所述控制单元通过检测信号判定所述延伸件3100将所述球囊4000充分延展,此时球囊4000处于收缩状态。反之,则判定所述延伸件3100将所述球囊4000未充分延展,此时球囊4000未处于收缩状态。
[0051]
驱动单元1200的驱动状态包括正向驱动和反向驱动,在本实施例的一个实施方案中,所述驱动单元1200正向驱动时,驱动单元1200驱动推动单元1100及延伸件3100向远端移动,所述驱动单元1200反向驱动时,驱动单元1200驱动推动单元1100及延伸件3100向近端移动。所述驱动单元1200的驱动状态还包括驱动力调节,在本实施例的一个实施方案中,所述驱动单元1200带动推动单元1100及延伸件3100向远端移动的过程中,可以改变驱动力。应知道,所述驱动单元1200的驱动力较大,则有利于推动所述延伸件3100将球囊4000拉伸以充分延展。
[0052]
在本实施例的一种实施方案中,推动单元1100包括滑轨及滑动设置于所述滑轨上的滑块,所述滑块与所述延伸件3100固定相连,所述滑轨沿所述延伸件的轴向设置,使得所述滑块可沿所述延伸件3100轴向移动。所述驱动单元1200为气缸,用于带动所述滑块移动。应理解,所述驱动单元1200还可以是电动推杆或者其他能够实现伸缩功能的伸缩杆。
[0053]
图3为本实施例中的球囊导管的控制手柄的a向局部视图。如图2和图3所示,在本实施例的另一种实施方案中,推动单元1100包括一可沿所述延伸件3100轴向移动的传动齿条1110,所述传动齿条1110与所述延伸件3100固定相连且沿所述延伸件3100轴向延伸,所述驱动单元1200驱动所述传动齿条1110移动。所述传动齿条1110可以设置一通孔,通过所述通孔与所述延伸件3100过盈配合以使所述传动齿条1110与所述延伸件3100固定相连。为了加强固定所述延伸件3100与所述传动齿条1110,还可以将所述通孔的内壁与所述延伸件3100的外壁通过胶粘固定。所述传动齿条1110与所述延伸件3100的固定方式还可以根据本领域技术人员的经验进行选择,在此不做限定。
[0054]
图4为本实施例中的球囊导管的控制手柄的b向局部视图。如图2至图4所示,驱动单元1200包括电机1210、传动轴1220和传动齿轮1230,所述传动齿轮1230与所述传动齿条1110啮合,能够带动所述传动齿条1110移动。所述传动轴1220的一端连接所述电机1210的输出轴,另一端贯穿并伸出所述传动齿轮1230,所述传动轴1220与所述传动齿轮1230固定相连。所述电机1210的输出轴带动所述传动轴1220转动以带动所述传动齿轮1230。
[0055]
在本实施例的一种实施方案中,传动轴1220与传动齿轮1230是一个整体。在本实施例的又一种实施方案中,所述传动轴1220与所述传动齿轮1230是分别独立的部件,通过过盈配合连接形成一个整体。
[0056]
传动轴1220、传动齿轮1230和传动齿条1110可以是金属制成,包括采用铝或者铝
合金。所述传动轴1220、所述传动齿轮1230和所述传动齿条1110还可以是塑料制成,包括采用pe或pvc。应知道,采用铝、铝合金、pe或者pvc材质制成的所述传动轴1220、所述传动齿轮1230和所述传动齿条1110在保持结构刚性的同时,保持较轻的重量,有利于球囊导管的控制手柄1000的轻量化,进而方便术者使用所述球囊导管的控制手柄1000。
[0057]
图5为本实施例中的传动轴的剖视图。如图2至图5所示,所述电机1210的输出轴上设置有主动件1211,所述传动轴1220的所述一端设置有从动件1221,所述传动轴1220的所述另一端设置有传动件1240及离合开关1600,所述传动件1240与所述离合开关1600相连,控制手柄还包括限位件,所述限位件包括设置在传动件1240上能够限制其转动的第一限位件(图中未标出)。其中,所述传动件1240与所述传动轴1220转动连接,且能带动所述传动轴1220沿所述传动齿轮1230的轴向移动。所述驱动单元1200与所述传动齿轮1230通过所述主动件1211与所述从动件1221相连,所述离合开关1600能够带动所述传动件1240沿所述传动齿轮1230的轴线的方向移动,使得所述主动件1211与所述从动件1221紧贴或脱离。
[0058]
应知道,球囊导管的控制手柄包括壳体,所述限位件(图中未标出)还包括设置在壳体上与所述第一限位件配合的第二限位件(图中未标出)。优选的,第一、第二限位件(图中未标出)分别包括一个平面,两个平面相配合,以限制传动件1240的旋转;可替换的,第二限位件(图中未标出)可以是滑槽或凸起,相配合的,第一限位件可以是与该滑槽或凸起相匹配的凸起或滑槽。所述第一、第二限位件(图中未标出)的外形与设置位置可以依据本领域技术人员的经验进行设置,在此不做限定。
[0059]
作为一种优选的实施方式,继续参照图5,传动件1240由第一传动件1241和第二传动件1242组成。使得所述传动件1240与所述传动轴1220能够更加的便于配合安装。应知道,所述传动件1240的外形与结构可以依据本领域技术人员的经验进行配置,在此不做限定。
[0060]
请参照图2至图5,球囊导管的控制手柄1000的推钮1300与所述传动齿条1110固定相连,能够带动所述传动齿条1110移动。所述推钮1300可以与所述传动齿条1110卡接固定,还可以与所述传动齿条1110以焊接或胶粘接的方式固定。所述球囊导管的控制手柄1000的壳体开设有腰孔,所述推钮1300贯穿所述腰孔并可在所述腰孔内滑动。应知道,推钮1300及所述球囊导管的控制手柄1000的壳体可以由塑料制成。如此,在保证球囊导管的控制手柄1000结构强度的同时,还可以降低球囊导管的控制手柄1000的重量,使得球囊导管的控制手柄1000更为轻便,方便握持使用。
[0061]
请结合图5,离合开关1600与所述传动件1240螺纹连接,在限位件(图中未标出)的作用下,转动所述离合开关1600能够带动所述传动件1240沿所述传动齿轮1230的轴向移动。所述传动齿轮1230的轴线与所述传动件1240及所述从动件1221的轴线重合,由此,所述离合开关1600能够带动所述传动件1240沿所述传动齿轮1230的轴线的方向移动,以带动所述主动件1211与所述从动件1221脱离。
[0062]
如图4和图5所示,离合开关1600与传动件1240螺纹连接,所述离合开关1600与所述传动件1240连接处设置有螺纹,由此,所述离合开关1600相对于所述传动件1240发生转动时,所述离合开关1600可以带动所述传动件1240沿所述传动齿轮1230的轴线的方向移动,且所述传动件1240与所述传动轴1220转动连接,但通过限位件(图中未标出)限制传动件1240旋转。也即,所述传动件1240可以相对于传动轴1220及传动齿轮1230转动,如此,即使传动轴1220及传动齿轮1230转动,所述传动件1240的位置不会发生变动。当需要切换到
手动操作推钮1300时,旋转离合开关1600,在限位件(图中未标出)的作用下,所述传动件1240便沿着所述传动齿轮1230的轴线的方向移动,由于传动齿条1110足够宽,传动齿轮1230可在传动齿条1110的宽度方向(也即所述传动齿轮1230的轴线方向)移动。在本实施例的一个实施方案中,所述限位件(图中未标出)设置于壳体上。
[0063]
传动件1240带动传动轴1220沿所述传动齿轮1230的轴线的方向移动,进而带动齿轮及从动件1221朝离合开关1600的方向移动,以使所述从动件1221与主动件1211脱离。此时,电机1210及所述主动件1211不能再驱动所述传动轴1220转动,且术者可以手动推动推钮1300以实现延伸件3100的移动,进而控制球囊4000收缩状态。由于所述传动轴1220与所述传动件1240可转动连接,在推钮1300带动所述传动齿条1110时,所述传动齿条1110会带动所述传动齿轮1230和传动轴1220的转动,但不会带动所述传动件1240及离合开关1600转动。
[0064]
在本实施例的一个实施方案中,传动件1240与从动件1221可以是一对互相配合的锥齿轮,并且所述传动件1240与所述从动件1221沿轴向移动以形成啮合状态和分离状态,当所述传动件1240与所述从动件1221啮合时,所述传动件1240便可带动所述从动件1221,当所述传动件1240与所述从动件1221分离时,从动件1221可以单独运转。
[0065]
可选的,传动齿条1110上设置有限位块,用于限制所述传动齿条1110的行程。应理解,所述传动齿条1110与传动齿轮1230啮合,使得传动齿轮1230能够带动所述传动齿条1110移动,若所述传动齿轮1230与所述传动齿条1110脱离,会导致传动失效,这是我们不希望的。因此,在所述传动齿条1110上设置有限位块,防止所述传动齿轮1230与所述传动齿条1110脱离。
[0066]
可选的,球囊导管的控制手柄1000还包括指示单元1400,用于实时指示所述球囊导管3000的状态。进一步的,所述控制单元依据所述推动单元位置信息和所述球囊位置信息判断所述球囊的状态,并实时向所述指示单元发出指示信号。如此,可以方便术者实时了解手术进展情况,防止因手术情况的信息传递延时,造成消融过度、消融不够或操作错误等问题,降低手术风险。
[0067]
请参照图2,控制单元实时判断球囊导管3000的状态并实时向所述指示单元1400输出指示信号。所述指示单元1400包括光罩1430、指示灯1410和发光元件1420,光罩1430包裹所述指示灯1410及所述发光元件1420。所述指示灯1410根据所述指示信号或所述报警信号发出特定颜色和/或时长的光线。所述发光元件1420用于增强光线,所述指示灯1410发出的光线传递到所述发光元件1420,增强后的光线通过所述光罩1430向外显示所述球囊4000的状态信息和/或报警信息。由此,所述指示单元1400向术者进行了光信号提醒。
[0068]
进一步的,指示灯还可以根据所述控制信号发出特定颜色和/或时长的光线,所述控制信号包括球囊温度信息、推动单元位置信息、球囊位置信息等。由此,指示单元能够呈现出球囊导管的球囊温度信息、推动单元位置信息、球囊位置信息等。
[0069]
更进一步的,当所述控制单元同时接收到推动单元位置信息和球囊位置信息时,所述控制单元向所述驱动单元1200输出停止信号,当所述控制单元未同时接收到推动单元和球囊位置信息时,所述控制单元输出报警信号并同时向所述驱动单元1200输出停止信号。所述指示灯还可以根据所报警信号发出特定颜色和/或时长的光线。由此,指示单元显示报警信息。
[0070]
可选的,所述指示单元1400还包括蜂鸣器,根据所述指示信号、控制信号和报警信号发出特定音调和/或音量的声音。通过所述蜂鸣器对术者进行了声信号提醒。
[0071]
作为一种可替代的实施方案,指示单元1400可以为显示屏,根据所述控制单元的指示信号、控制信号和报警信号实时显示球囊导管3000的状态。通过显示屏实时显示手术的情况,在需要进行提醒时,显示屏显示提示信息,并且可以通过显示屏的背景颜色,对术者进行危险等级提醒。
[0072]
图6为本实施例中的控制单元的信息流示意图。如图6所示,温度检测模块实时检测所述球囊温度信息,并将所述温度信息传输给所述控制单元。位置检测模块实时检测所述推动单元位置信息和球囊位置信息,并将所述推动单元位置信息和球囊位置信息传输给所述控制单元,控制单元根据囊温度信息、推动单元位置信息、球囊位置信息控制所述驱动单元1200的驱动状态。
[0073]
在一个实施方式中,在冷冻球囊4000消融手术中,当复温温度已达到10摄氏度时,温度检测模块向所述控制单元输出球囊温度信息,所述控制单元向所述驱动单元1200输出启动信号,驱动单元1200带动推动单元1100,带动固定在所述推动单元1100上的延伸件3100沿轴向朝远端移动。驱动单元1200启动一设定时间后停止。
[0074]
在一个优选的实施方式中,在冷冻球囊4000消融手术中,当复温温度已达到10摄氏度时,温度检测模块向所述控制单元输出球囊温度信息,所述控制单元向所述驱动单元1200输出启动信号,驱动单元1200带动推动单元1100,带动固定在所述推动单元1100上的延伸件3100沿轴向朝远端移动。所述位移检测模块收到所述第一位置传感器1500的检测信号时,向所述控制单元输出推动单元位置信息。所述控制单元收到所述推动单元位置信息时,向所述驱动单元1200输出停止信号。
[0075]
在一个更优的实施方式中,在冷冻球囊4000消融手术中,当复温温度已达到10摄氏度时,温度检测模块向所述控制单元输出球囊温度信息,所述控制单元向所述驱动单元1200输出启动信号,驱动单元1200带动推动单元1100,带动固定在所述推动单元1100上的延伸件3100沿轴向朝远端移动。所述位移检测模块实时接收所述第一位置传感器1500的检测信号和所述第二位置传感器的检测信号,并向所述控制单元输出推动单元位置信息和球囊位置信息。当所述控制单元同时接收到推动单元位置信息和球囊位置信息时,所述控制单元向所述驱动单元1200输出停止信号;当所述控制单元未同时接收到推动单元和球囊位置信息时,所述控制单元输出报警信号并同时向所述驱动单元1200输出停止信号。
[0076]
可选的,当复温温度达到20摄氏度时,驱动力达到峰值,直至冷冻消融流程完成后,驱动单元1200释放驱动力。
[0077]
此外,本发明还提供了一种球囊导管的控制手柄1000的使用方法,包括以下步骤:步骤s1:当指示单元1400显示报警信息时,转动离合开关1600,将所述球囊导管的控制手柄1000切换为手动模式;步骤s2:通过推钮1300带动所述延伸件3100沿轴向移动。
[0078]
通常的,球囊导管的控制手柄1000采用自动模式,如果手术进行过程中,需要术者手动进行操作时,术者可以通过离合开关1600对球囊导管的控制手柄1000的操作模式进行切换。
[0079]
综上所述,本发明实施例中提供了一种球囊导管的控制手柄,用于控制套置于所
述球囊导管内的延伸件沿轴向移动,以控制球囊的收缩状态,所述球囊导管的控制手柄包括推动单元、驱动单元、第一位置传感器和控制单元。其中,所述推动单元与所述延伸件固定相连,用于带动所述延伸件沿轴向移动。所述驱动单元,与所述推动单元相连,用于带动所述推动单元,所述第一位置传感器,用于检测所述推动单元的位置。所述控制单元,根据所述推动单元的位置来确定所述球囊的收缩状态,并控制所述驱动单元的驱动状态。本发明的球囊导管的控制手柄能够自动带动所述延伸件沿轴向移动,在完成后冷冻消融后,自动推送延伸件移动以使所述球囊在患者体内充分延展伸直,以使所述球囊能够顺利回撤到鞘管内,同时,也避免了所述球囊在人体内多次反复推送或抽真空,对非靶组织的损伤风险降到最低,改善手术的安全性。此外,球囊导管的远端设置第二位置传感器,用于检测所述球囊导管的收缩状态。可以进一步确定所述球囊的收缩状态。防止球囊未充分延展伸直的状态下被回撤到鞘管内,进而导致球囊回收失败。此外,球囊导管的控制手柄还包括指示单元,用于实时显示球囊的状态信息和/或报警信息。如此,可以方便术者实时了解手术进展情况,防止因手术情况的信息传递延时,造成消融过度、消融不够或操作错误等问题,降低手术风险。相应的,本发明还提供了一种球囊导管的控制手柄的使用方法。相应的,本发明还提供了一种冷冻消融系统。
[0080]
上述仅为本发明的优选实施例而已,并不对本发明起到任何限制作用。任何所属技术领域的技术人员,在不脱离本发明的技术方案的范围内,对本发明揭露的技术方案和技术内容做任何形式的等同替换或修改等变动,均属未脱离本发明的技术方案的内容,仍属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1