药物填充针系统及流体处理组件的制作方法
药物填充针系统及流体处理组件
1.相关申请的交互参考
2.本申请的课题涉及美国专利申请14/890,223中的公开内容,其是2012年7月20日提交pct申请的美国国家阶段pct/us2012/047765,其要求于2011年7月22日提交临时申请61/510,780的优先权。所有这些申请通过引用并入本文。
3.且,本申请是申请日为2016年12月9日、申请号为201680072325.8、发明名称为“用于在受控环境外壳中保护及去保护流体路径的设备及方法”的分案申请。
技术领域
4.这份文件一般关于用于在受控环境外壳中处理材料的设备和方法,包括使用受保护和未受保护的流体路径而无菌地填充药物容器的设备和方法。
背景技术:
5.受控环境外壳是本领域中已知的。这种外壳(例如)用以容纳危险材料。在其他例子中,受控环境外壳用以提供具有有限数量的微粒的受控环境。
6.在本领域中,受控环境外壳通常装有用于将材料传送进出外壳的埠,并且埠装有用于手动操纵在外壳内侧的设备、零件或材料的手套。这种手套具有显著的穿刺危险。
7.在本领域已知的一些例子中,受控环境外壳还用以限制暴露于活的微粒。这种受控环境外壳可能需要用于细胞培养物的无菌处理及用于制造药品、医疗装置、食品或食品成分。在这些情况下,需要对受控环境外壳进行去污。这可使用蒸汽热处理或使用化学试剂化学处理。在本领域已知的合适的化学试剂包含过氧化氢、臭氧、β
‑
丙内酯、氮丙啶、甲醛、二氧化氯、环氧乙烷、环氧丙烷和过乙酸。在大多数情况中,去污和除菌操作必须在清洁工艺之前进行。这种清洁工艺具有通过简单的机械和化学作用而移除主要污染物的功能。
8.在习知技术的一些例子中,受控环境还含有自动化设备。这种自动化设备包括用于填充小瓶的机器。位于受控环境中的自动化设备通常具有这样的尺寸和复杂度,使得其不能完全自动地操作,而无需人为干预。这种人为干预通常需要使用具有穿刺的相关风险的手套。
9.受控环境外壳内的流体路径可由挠性管材料所制成,且可因此具有显著的气体渗透性。已知天然存在于空气中的气体(诸如氧气和二氧化碳)以及化学去污剂扩散到这些管材料。这些试剂在挠性管中的累积和随后的延迟释放可能是在操作期间的主要污染问题。这特别适用于对暴露于烷化剂、氧化剂、自由基或二氧化碳敏感的产品或溶液。涉及使用手套的人为干预的通常例子是在去污完成之后安装流体路径或多个流体路径。
10.鉴于上述,仍然有用于不需要经由使用手套而进行人为干预的受控环境的需求。
技术实现要素:
11.在本发明的一个态样中,提供有一种用于在受控环境外壳内安装流体路径的方法,包含以下步骤:保护流体路径免受流体路径外部的环境;将流体路径引入受控环境外
壳;对受控环境外壳进行去污;及在受控环境外壳内机械地去保护流体路径。可通过机器人臂操纵系统而机械地去保护。在将流体路径引入受控环境外壳中之后,自动完成对受控环境外壳进行去污。在对受控环境外壳进行去污之后,自动地进行去保护。
12.在本发明的一个态样中,提供有一种用于在受控环境外壳内沿着流体路径将流体传送到受控环境外壳内的目的地的方法,包含以下步骤:保护流体路径免受流体路径外部的环境;将流体路径引入所述受控环境外壳;对受控环境外壳进行去污;机械地保护在受控环境外壳内的流体路径;及沿着流体路径将流体传送到目的地。可通过机器人臂操纵系统而进行机械地去保护。流体路径可包含预除菌的管。方法可进一步包含以下步骤:过滤在流体路径中的流体,且过滤可为除菌过滤。目的地可为细胞培养物、组织培养物、酶溶液、固定化酶的悬浮液、活性成分的混合物及赋形剂的至少一个。流体可为无菌流体。受控环境外壳可为隔离器。目的地可为用于药物产品的微井孔板或容器。
13.在本发明的一个态样中,提供有一种用于从受控环境外壳卸载流体路径的方法,包含以下步骤:机械地保护在受控环境外壳内的流体路径;对受控环境外壳进行去污;打开受控环境外壳;及从受控环境外壳移除流体路径。可通过机器人臂操纵系统而进行机械地保护。在保护流体路径之后可自动地对受控环境外壳进行去污。在对受控环境外壳进行去污之后,可自动进行受控环境外壳的打开。
14.在本发明的一个态样中,提供有一种用于对具有流体路径的受控环境外壳进行去污的方法,方法包含以下步骤:通过机器人动作而机械地保护在受控环境外壳内的流体路径;对受控环境外壳进行去污;及打开和关闭受控环境外壳。打开和关闭受控环境外壳可在对受控环境外壳进行去污之前或之后进行。可通过机器人臂操纵系统而进行机械地保护。在机械地保护流体路径之后,可自动地对受控环境外壳进行去污。
15.在本发明的一个态样中,提供有一种用于在受控环境外壳内保护和去保护流体路径的设备,受控环境外壳包括通过具有可移除护套的填充针而端接的流体路径;及远程操作的操纵系统,用于保护及/或去保护流体路径。远程操作的操纵系统可包括机器人臂操纵系统。设备可进一步包括防损坏装置,经定位以显露在护套和填充针之间的密封的破裂。设备可进一步包括移除站,移除站包括可操作以与护套的一部分相互作用的表面。远程操作的操纵系统可包括机器人末端工具,机器人末端工具包括经成形以保持填充针的至少一个表面。流体路径可为预除菌的单元。
16.在本发明的一个态样中,提供有一种用于在受控环境外壳内安装流体路径的设备,包括用于输送流体的手段;及用于保护及/或去保护用于输送流体的手段的远程操作手段。
17.发明人设想紧密且设计良好的自动化设备可在封闭的受控环境内侧操作而不使用任何手套,从而消除手套漏洞的风险。本发明提供一种在受控环境外壳内侧安装流体路径,而不使用手套的方法。这需要在流体路径在去污工艺期间被保护且在使用流体路径之前不被保护。此外,流体路径可在使用之后自动地关闭。
18.可在以后的时间重新打开和重新使用关闭的流体路径。这可用于在需要破坏封闭的受控环境的完整性的非计划中事件之后继续使用流体路径。此外,流体路径的关闭可在流体路径已用于传送有害物质的情况下为特别有用的。在关闭流体路径之后,封闭环境可被清洁和去污;在这之后可移除流体路径。
19.在本发明的第一态样中,提供有一种用于在无菌环境中自动地执行流体处理工艺的流体处理组件,组件包含:第一护套部分,包括:器具部分,设置在第一护套部分内,用于在工艺中使用;第一锁定机构部分;及第一密封部分;第二护套部分,包括:第二锁定机构部分,经配置而以正向棘爪与第一锁定机构部分配合;及第二密封部分,经设置以当第一和第二锁定机构部分相互配合时与第一密封部分无菌地密封,其中第一和第二护套部分界定当第一和第二锁定机构部分相互配合时无菌地包封器具部分的密封腔。组件可为填充组件,且器具部分包含填充针的近端分配部分,填充针包括流体导管,流体导管延伸通过第一护套部分到达远端流体供应端,使得当第一和第二锁定机构部分相互配合时,填充针的近端分配部分位于腔内侧,且流体导管的远端流体供应端位于腔外侧。流体导管可包括与填充针的近端分配部分流体连通的挠性管。组件可为拭子组件,其中当第一和第二锁定机构部分相互配合时,器具部分包含设置在腔内侧的拭子。
20.组件可进一步包含:受控环境外壳,经配置以无菌地隔离工艺并保持流体处理组件;及铰接的机器人臂,设置在外壳内,以操纵流体处理组件。第一和第二护套部分可分别地包含第一和第二啮合部分。组件可进一步包含机器人臂端件,用于机器人臂,端件经配置以通过正向棘爪与第一啮合部分啮合而承载第一护套部分;及保持站,包含第一保持固定件,用以保持第二护套部分,固定件经配置用于与第二啮合部分啮合。保持站可包含倾斜的指状物,经设置以与第二护套部分的第二啮合部分啮合,以将第一护套部分从第二护套部分释放。保持站可包含第二保持固定件,经配置以悬挂相互啮合的第一和第二护套部分。
21.第一和第二护套部分可为分离的注射成型零件,且其中锁定机构部分包括至少一个一体模制的弹簧加载构件。组件可进一步包括损坏指示器,机械地连结到锁定机构部分之一个,且包括经建构以响应于第一和第二密封表面的机械分离而不可逆地撕裂的部分。
22.第一和第二锁定机构部分可经配置以当第一和第二锁定机构部分沿着锁定轴线而朝向彼此移动时相互配合。第一护套部分可进一步包括第一支承表面,至少大致垂直于锁定轴线而定位,且第二护套部分可进一步包括第二支承表面,至少大致垂直于锁定轴线并面向第一支承表面而定位。
23.在进一步的态样中,提供有一种用于在受控环境外壳中自动地执行流体处理工艺的方法,方法包含以下步骤:在第一密封护套内侧提供第一器具,第一护套通过在第一护套上的基于棘爪的密封机构而密封,基于棘爪的密封机构保持第一护套围绕第一器具而无菌地密封;将第一护套放置在受控环境外壳中;在放置的步骤之后,绕第一护套而对受控环境外壳进行去污;致动所述基于棘爪的密封机构,以打开第一护套;及以在受控环境外壳中的器具执行在流体处理工艺中的至少一个步骤。提供的步骤可包括以下步骤:提供填充针,且其中执行的步骤包括以下步骤:执行填充操作。去污的步骤可在执行填充操作的步骤之前进行,进一步包括再次致动所述基于棘爪的密封机构的步骤,以密封第一护套。
24.方法可进一步包括额外的步骤:在执行填充操作的步骤和再次致动所述基于棘爪的密封机构的步骤之后,对受控环境外壳进行去污。方法还可进一步包括以下步骤:在第二密封护套内侧提供拭子;在第二护套上提供第二基于棘爪的密封机构,第二基于棘爪的密封机构保持第二护套围绕拭子而密封;将第二护套放置在受控环境外壳中,其中去污的步骤在第二护套的外侧进行去污;及在执行填充操作的步骤之后擦拭填充针。
25.方法可进一步包含以下步骤:从受控环境外壳中移除第一器具和第一护套;丢弃
第一器具和第一护套;在第二密封护套内侧提供第二器具;在第二护套上提供第二基于棘爪的密封机构,第二基于棘爪的密封机构保持第二护套围绕第二器具而密封;将第二护套放置在受控环境外壳中;对围绕第二护套的受控环境外壳进行去污;及以在无菌环境中的第二器具执行在流体处理工艺的另一次运行中的至少一个步骤。
26.致动所述基于棘爪的密封机构的步骤和执行填充操作的步骤可至少部分地通过设置在受控环境外壳内的机器人臂而实施。方法可进一步包括以下步骤:提供无菌地密封到填充针的预除菌管。执行填充操作的步骤可包括以下步骤:将流体传送到细胞培养物、组织培养物、酶溶液、固定化酶的悬浮液、活性成分的混合物和赋形剂的至少一个。执行填充操作的步骤可包括以下步骤:将流体传送到用于药物产品的微井孔板和容器的至少一个。
27.在进一步的态样中,提供有一种用于在受控环境外壳中自动地执行流体处理工艺的方法,包含以下步骤:提供多个可抛弃式器具,各自无菌地密封在多个可抛弃式护套中的一个的内侧;将多个密封护套的第一个放置在受控环境外壳中,多个密封护套的第一个容纳多个器具的第一个;在放置第一护套的步骤之后,对围绕第一护套的受控环境外壳进行去污;打开第一护套;以在受控环境外壳中的第一器具执行在流体处理工艺的至少一个步骤;从受控环境外壳中移除第一护套和第一器具;丢弃第一器具和第一护套;将多个密封护套的第二个放置在受控环境外壳中,多个密封护套的第二个容纳多个器具的第二个;在放置第二护套的步骤之后,对围绕第二护套的受控环境外壳进行去污;打开第二护套;以在受控环境中的第二器具执行在流体处理工艺的另一次运行中的至少一个步骤;及对多个可抛弃式器具的连续的再一个和多个可抛弃式护套的对应一个重复放置、去污、打开、移除和丢弃的步骤。提供的步骤可提供多个可抛弃式器具,每一可抛弃式器具包括完整的损坏指示器。放置第一、第二和再一个护套的步骤可各自包括针对待放置的护套放置完整的损坏指示器,且打开第一、第二和再一个护套的步骤可各自包括破坏用于待打开的护套的损坏指示器。
28.在进一步的态样中,提供有一种用于在无菌环境中自动地执行流体处理工艺的流体处理组件,包含:第一护套部分,包括:器具部分,设置在第一护套部分内,用于在工艺中使用;第一锁定机构部分;第一密封部分;及第一支承表面,至少大致垂直于锁定轴线而定位;第二护套部分,包括:第二锁定机构部分,经配置以当第一和第二锁定机构部分沿着锁定轴线朝向彼此移动时与第一锁定机构部分配合;第二密封部分,经设置以当第一和第二锁定机构部分相互配合时无菌地密封第一密封部分;及第二支承表面,至少大致垂直于锁定轴线并面向第一支承表面而定位,其中第一和第二护套部分界定当第一和第二锁定机构部分相互配合时无菌地包封器具部分的密封腔。
29.在进一步的态样中,提供有一种用于在无菌环境中自动地执行流体处理工艺的流体处理组件,包含:第一护套部分,包括:拭子,设置在第一护套部分内,用于在工艺中使用;及第一密封部分;及第二护套部分,包括:第二密封部分,经设置以与第一密封部分无菌地密封,其中第一和第二护套部分界定当第一和第二密封部分相互配合时无菌地包封拭子的密封腔。
30.在进一步的态样中,提供有一种用于在受控环境外壳中自动地执行流体处理工艺的方法,包含以下步骤:在无菌地密封的第一护套内侧提供拭子;将第一护套放置在受控环境外壳中;在放置的步骤之后,对围绕第一护套的受控环境外壳进行去污;打开第一护套;
及以在受控环境外壳中的拭子擦拭在流体处理工艺中所使用的器具。
31.从下面对本发明的优选实施例的详细描述中,本发明的其它特征、元件、步骤、特性和优点将变得更加明显。
附图说明
32.在图式中(不一定按比例而绘制),相同的元件符号可在不同的图中描述类似的部件。具有不同字母下标的相同数字可表示类似组件的不同实例。图式通过例子而非通过限制的方式大体地显示在本文件中所讨论的各种实施例。
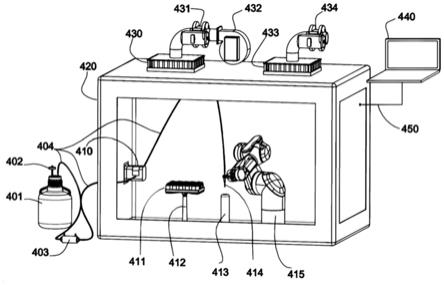
33.图1显示用于在受控环境外壳中保护和去保护流体路径的设备。
34.图2显示用于在受控环境外壳中保护和去保护流体路径的设备的端件的细节
35.图3显示形成用于在受控环境外壳中保护和去保护流体路径的设备的一部分的机器人臂的细节
36.图4是典型的现有技术方法的流程图。
37.图5显示本发明的一个态样的方法流程图。
38.图6显示本发明的另一态样的方法流程图。
39.图7显示本发明的另一态样的方法流程图。
40.图8显示本发明的另一态样的方法流程图。
41.图9a和图9b分别显示填充针和填充针护套的组合的等距视图和剖面,而图9c显示填充针和具有损坏指示器的填充针护套的组合。
42.图10显示用于与图12的护套移除站和图11的机器人臂端件一起使用的拭子、拭子护套和拭子护套盖。
43.图11显示根据本发明的一个实施例的机器人臂端件,用于与图12的护套移除站及图9a和图9b的填充针和填充针护套一起使用。
44.图12显示根据本发明的一个实施例的护套移除站。
45.图13显示图2的护套移除站,其中在使用之前将拭子包装和填充针包装悬挂在护套移除站上。
46.图14a显示通过图11的机器人臂端件所保持的图9a和图9b的填充针包装。
47.图14b显示通过图11的机器人臂端件所保持的图9a和图9b的填充针包装以及图10的拭子包装。
48.图15显示(a)用于在受控环境外壳内沿着流体路径将流体传送到受控环境外壳内的目的地的方法和(b)用于在受控环境外壳内安装流体路径的方法的流程图。
49.图16显示用于从受控环境外壳卸载包含填充针的流体路径的方法的流程图。
具体实施方式
50.图1显示用于在受控环境外壳420中保护和去保护流体路径404的设备的实施例。如于此所使用的术语“流体”表示任何液体、气体、液体
‑
气体混合物和具有流体属性(诸如流动性)或在环境温度和压力下具有明显的流动性之在液体中的固体的任何混合物,包括但不限于在液体中散布固体或多个固体、乳液、浆液、微乳液、胶体悬浮液、悬浮液、脂质体的悬浮液和胶质粒子的悬浮液或类似者。如于此所使用的术语“流体路径”表示用于输送流
体的任何单一通道或多通道管道,不论是刚性或挠性的。
51.流体路径404在容器401处开始。于此所使用的术语“容器”表示适以容纳流体的任何容器,包括但不限于任何小瓶、注射器、安瓿、小容器、瓶、烧瓶、烧杯、袋子、在多井孔板中的井孔或管。容器401装配有空气过滤器402。容器401可配备有任选的感测器(未显示),以测量体积、流体的重量或其它参数。在一些实施例中,可存在有彼此并联或串联连接的多个容器。沿着流体路径404,可存在有测量性质(包括但不限于压力、流量、温度、密度和导电率的任一个或多个)的任选的测量装置(未显示)。流体路径404可装配有过滤元件403。过滤元件403可经选择以适合于流体的无菌过滤。
52.在图1中,流体路径404包含挠性管405并且经由密封的开口(未显示)进入受控环境外壳420。密封可(例如)经由使用合适的无菌地密封的凸缘(未显示),其可通过(例如但不限于)无菌三夹具而密封。容器401和空气过滤器402可位于受控环境外壳420的外侧,如图1中所示。在本发明的其他实施例中,容器401和空气过滤器402可位于受控环境外壳420的内侧。
53.受控环境外壳420配备有入口过滤器430、入口阀431、鼓风机432、出口过滤器433和出口阀434。鼓风机432、入口过滤器430和出口过滤器433的特性经选择以在受控环境外壳420内侧产生受控环境。如本领域技术人员所理解的,各种其它过滤器和鼓风机设置可在受控环境外壳420内侧建立受控环境。例如但不限于,可通过涡流气流、水平单向气流和垂直单向气流的任一个或多个而获得合适的受控环境。
54.来自容器401的流体可通过多种不同的机构通过流体路径404而传送,包括但不限于如图1中所示的蠕动泵410、在容器401和受控环境外壳420之间的压力差、在容器401和流体路径404的末端中的静态高度差、齿轮泵、凸轮泵、隔膜泵、活塞泵、或注射器泵。在图1中,泵410显示为设置在受控环境外壳420内侧。在其他实施例中,泵410可设置在受控环境外壳420外侧。
55.流体路径404的挠性管405可与端件414端接。合适的端件可为(例如但不限于)填充针、移液管分配系统、注射器分配系统、阀分配系统、快速连接器、无菌连接器、分配尖端和用于刺穿弹性体的针。在图1中,端件414选择为填充针。
56.端件414可通过机械构件(例如,机器人臂操纵系统415)而在受控环境外壳420内侧操纵。合适的机器人臂操纵系统415可为铰接的机器人臂。用于机械地操纵端件414的合适的机器人臂操纵系统包括但不限于6轴机器人臂、选择适应性装配机器人臂(scara)系统、r
‑
θ机器人或线性致动器和旋转致动器的组合。
57.流体沿着流体路径404被传送到目的地,目的地可为容器,诸如具有位于在图1中的基座412上的小瓶411的托盘。目的地可为用于药物产品的微井孔板。
58.流体路径404可用于各种目的,包括但不限于空容器的填充;容器的清洗和冲洗;用冷冻干燥粉末将流体添加到容器;将流体添加到含有赋形剂及/或活性剂成分的容器;向细胞、组织或微生物、接种细胞或微生物添加培养基;向酶溶液或固定化酶的悬浮液添加基质;添加气体(诸如氩气或氮气)以在容器中产生惰性顶部空间;添加气体(诸如氮气、空气或二氧化碳)到细胞并通过抽吸将流体从容器中移除。于此所使用的术语“赋形剂”表示使用作为药物的稀释剂或载体的惰性物质。
59.在一些应用中,流体路径404可能需要无菌地传输流体。在这种情况下,流体路径
404可在安装在受控环境外壳420中之前进行预除菌。流体路径404的无菌部分可从容器401或过滤器403开始。无菌流体路径404的安装需要密封端件414。
60.图4是显示用于在习知技术的受控环境外壳中安装流体路径的习知技术的方法的流程图。习知技术的方法需要以下顺序的步骤:对习知技术的受控环境外壳进行去污(100);将流体路径传送(110)到习知技术的受控环境外壳中;及在将流体路径使用(130)于其意欲的目的之前,用手将流体路径安装(120)在习知技术的受控环境外壳中。
61.在本发明的一个态样中,提供有一种用于在受控环境外壳420中安装流体路径404的方法。参考图1的设备和图5的流程图,方法包含保护(301)流体路径404免受流体路径404外部的环境;将流体路径404引入(302)到受控环境外壳420中;对受控环境外壳420进行去污(303);及机械地去保护(304)流体路径404。在其未受保护状态中,流体路径404可接着用于将流体输送(305)到目的地411,其中流体可为无菌(aseptic)或无菌(sterile)流体。流体的这种输送(305)可包含使用过滤元件403过滤流体路径404中的流体,且过滤可为无菌过滤。术语“无菌(sterile)”和“无菌(aseptic)”在本说明书中可互换使用。于此所使用的术语“去污”表示用于移除或去活性污染物至可接受水平的工艺,包括但不限于病毒、细菌、孢子、朊病毒、霉菌、酵母、蛋白质、热原和内毒素。于此所使用的“去污”包括除菌(即,破坏所有微生物(包括细菌孢子)至存活的生物体的概率通常小于1:106)和杀菌(即,破坏和移除特定类型的微生物)。
62.在图2中,显示有用于机械地保护(304)流体路径404的合适设置,包含填充针形式的流体路径404的端件414及填充针护套503。填充针414包含填充针管501和填充针座502。填充针管501与图1的流体路径404流体连通且无菌地连接到流体路径404。当流体路径404在受控环境外壳420内时,填充针护套503可储存在图1所示的受控环境外壳420的护套移除站413中。
63.填充针座502和填充针管501可胶合或焊接在一起。在替代实施例中,填充针座502和填充针管501可由固体材料制成为一个部件。填充针护套503可使用具有不同热膨胀系数的材料而制造,以允许填充针护套503在热膨胀之后在填充针座502上滑动和滑离。替代地,填充针护套503可经设计以使用多孔ptfe或可透过蒸汽可渗透的弹性体材料在填充针座502上滑动配合。
64.保护(301)流体路径404包含将填充针护套503密封地放置在填充针414的上方,使得填充针护套503与针座502密封。填充针护套503和针座502可配备具有一或多个防损坏特征504,防损坏特征504将提供破坏在针座502和填充针护套503之间的密封的证据。可能的防损坏特征504包括但不限于热收缩带、带密封件、可破坏的环、撕裂连接器和卡扣连接撕裂连接器。去保护(304)流体路径404包含从填充针414移除填充针护套503,从而将填充针414暴露于受控环境外壳420内的环境。当填充针414在受控环境外壳420内使用时,填充针护套503储存在护套移除站413中。
65.当填充针414在受控环境外壳420内时,机械地去保护(304)填充针414可包含使用在图1中所示的机器人臂操纵系统415。图3显示图1的机器人臂操纵系统415的一部分,其中前臂601连接到腕部602,且腕部602连接到工具凸缘603。在图3中所示为叉形的终端工具604具有部分打开的孔,其直径使得终端工具604可围绕针座502的窄管状区域滑动,且终端工具604可向上移动,以建立与针座502的精确定位配合。为了去保护(304)填充针414,终端
工具604使填充针414与填充针护套503一起移动,且将填充针414与填充针护套503一起放置在护套移除站413中。
66.在设备和方法的一个实施例中,护套移除站413加热填充针护套503,由此将填充针护套503膨胀并释放其对针座502的抓握或密封。本领域的实施者将理解存在有许多不同的填充针护套503可从填充针414移除的方式。终端工具604通过机器人臂操纵系统415的运动从填充针护套503移除填充针414。填充针护套503可保持在护套移除站413中,而机器人臂操纵系统415将填充针414移动到目的地。在设备和方法的一个实施例中,所示的目的地是具有位于在图1中的基座412上的小瓶411的托盘。
67.终端工具604和针座502可具有各种不同的其他形状,允许使用各种其他封闭系统,诸如(例如但不限于)插头、具有滑动配合的o形环密封件的盖(具有最小的闭塞表面区域)、具有膜剥离密封件的盖或扭断盖。如本领域技术人员所理解的,一些封闭系统将比用于特定除菌方法的其它封闭系统更合适。
68.具有较小渗透性的材料可在挠性管405的制造中使用,但这并不总是一种选择。还可通过向管添加额外的层来减小管渗透性。用于围绕挠性管405建立这样的额外层的示例性方法包括但不限于:用不可渗透的聚合物(诸如fep)进行热收缩;用不可渗透的聚合物进行多层共挤制;通过聚合物涂层(诸如聚(对二甲苯))产生扩散阻挡层;用胶带层包住;及装配套筒。
69.在本发明的进一步的态样中,提供有一种用于从受控环境外壳420卸载流体路径404的方法。参照图1的设备和图6的流程图,方法包含一旦流体路径404的使用已经完成时,机械地保护(306)受控环境外壳420内的流体路径404;对受控环境外壳420进行去污(303);及从受控环境外壳420移除(307)流体路径404。机械地保护(306)填充针414可包含使用图1中所示的机器人臂操纵系统415。
70.在受控环境外壳420内机械保护(306)填充针414可包含使用图1的机器人臂操纵系统415。机器人臂操纵系统415的终端工具604(参见图3)用以将填充针414移动到并将其放置在填充针护套503中,填充针护套503容纳在护套移除站413中。护套移除站413加热填充针护套503,直到填充针护套503能够在填充针414之上滑动,以在冷却之后适当地密封到针座502,从而保护(306)在受控环境外壳420内的填充针414。机器人臂操纵系统415可接着根据需要而进一步地移动经保护的流体路径404。
71.在本发明的进一步的态样中,可自动地完成使用机器人臂操纵系统415而机械去保护(304)和机械保护(306)填充针414。例如,一旦已完成对受控环境外壳420的去污(303)时,经由控制线450与受控环境外壳420传达控制指令的合适的控制器440(参见图1)可经编程以使用机器人臂操纵系统415自动地去保护(304)填充针414。这种自动化避免在机械地去保护(304)填充针414的步骤中的人为干预。在方法的实施例中,对受控环境外壳420进行去污(303)的步骤也可通过控制器440而管理。这允许安装填充针414的步骤的剩余者,在将流体路径404引入(302)到受控环境外壳420中的步骤之后,使用控制器440而自动化,包括使用填充针用于其安装的目的,及在这种使用之后机械地保护(306)填充针414。
72.在本发明的进一步的态样中,提供有一种用于对具有流体路径404的受控环境外壳420进行去污的方法。方法包含通过将填充针护套503密封地放置在填充针414之上而机械地保护(306)在受控环境外壳内的流体路径404,使得填充针护套503与针座502密封;对
受控环境外壳420进行去污(303);及打开(308)和关闭(309)受控环境外壳420。如可为当在目的地411处的流体或材料是危险的情况时,可在对受控环境外壳420进行去污(303)之后进行打开(308)和关闭(309)受控环境外壳420。这在图7中显示。替代地,可在对受控环境外壳420进行去污(303)之前进行打开(308)和关闭(309)受控环境外壳420。这在图8中显示,如可为当外部环境在目的地411处保持潜在污染流体或材料的情况时。机械地保护(306)填充针414可包含使用在图1中所示的机器人臂操纵系统415,如已经描述的。
73.使用机器人臂操纵系统415保护(306)填充针414可经由控制器440(参见图1)而自动地完成。控制器440可经编程以在打开(308)和关闭(309)受控环境外壳420之前使用机器人臂操纵系统415自动机械地保护(306)填充针414。打开(308)和关闭(309)受控环境外壳420可类似地经由控制器440而自动化。
74.我们到此已于此描述基于采用热量来将填充针414从填充针护套503固定或释放的图1的护套移除站413的实施例。我们现在转到子系统的另一个实施例,子系统包含以手边的第9a、9b、10和11图所描述的护套移除站413’、填充针414’、填充针护套503’和机器人臂操纵系统415。在这个实施例中,我们描述了替代的护套移除系统和相关联的护套移除站413’,并提供关于填充针414’、填充针护套503’和机器人臂操纵系统415的更多细节。
75.第9a和9b图分别提供了这个实施例的填充针护套503’和填充针414’的组合900的等距视图和剖面图。在本说明书中将使用术语“无菌地密封填充针包装”900来描述互相无菌地密封的填充针护套503’和填充针414’的组合。虽然图9a提供透视图,但是图9b的简单性允许更多元件被清楚地指出和编号。填充针护套503’包含经配置以接收填充针414’的分配端的实质圆柱形的器皿部分910和分别通过弹簧加载构件920a和920b而附接到器皿部分910的两个夹持构件930a和930b。在一个实施例中,在图9a和图9b中所示,弹簧负载通过构件920a和920b的自然弹性挠性而建立。为此,填充针护套503’可由具有合适的固有弹性且与无菌系统要求相容的聚合物材料所制成。定位孔眼950a和950b分别设置在夹持构件930a和930b中。夹持构件930a和930b进一步包含分别设置成与填充针414’啮合的夹持夹子960a和960b,如下面更详细描述的。
76.填充针414’可以许多不同的方式配置。在本非限制的示例性实施例中,填充针414’包含填充针管501’和填充针座502’。填充针414’包含分配部分506’,其是填充针414’的分配尖端。填充针管501’与图1的流体路径404流体连通。填充针座502’在由可弹性压缩的o形环940所提供的无菌压力密封中与填充针护套503’轴向地面对面匹配。填充针座502’进一步包含定位凸缘508a’和508b’,用于与填充针414’的夹持夹子960a和960b啮合。在制造中,弹簧加载构件920a和920b经制造以当夹持夹子960a和960b与定位凸缘508’啮合时被弹簧加载。当填充针414’在适当压缩下用可压缩o形环940套在填充针护套503’中时,夹持夹子960a和960b与定位凸缘508’啮合,且在将夹子960a和960b朝向彼此引导的张力下啮合。在这些情况下,在填充针护套503’中的张力包含在弹簧加载构件920a和920b中。考虑有当填充针414’被套在填充针护套503’中时,用于将夹子960a和960b朝向彼此推动的其他实施例,包括采用离散弹簧以使构件920a和920b被弹簧加载的实施例。
77.填充针护套503’可通过合适的聚合材料的注射成型而制造。为了保持单元成本低,可具体地注射成型为单一整体单元。在本说明书中,术语“整体”经采用以描述被制造的物体是来自没有接头或接缝的一件式材料的连续的整体,无论是通过铸造、模制或沉积,或
任何其它手段。在注射成型的领域中的单一模具通常产生整体产品。填充针座502’和填充针护套503’的锁定构件部分可特别地被一体地模制。这尤其包括弹簧加载构件920a和920b。
78.填充针座502’包含两个啮合夹子510a’和510b’,用于与图11的机器人臂端件1100啮合。这些操作将在下面通过以手边的图11而描述。啮合夹子510a’和510b’能够弯曲,使得它们的顶端可偏转更靠近在一起,而啮合夹子510a’和510b’可反应不论任何正推动它们在一起的本体而往回推动抵住。为此,啮合夹子510a’和510b’可为弹簧加载的。在第9a和9b图中所示的填充针座502’的实施例中,啮合夹子510a’和510b’通过从弹性材料(诸如(例如但不限于)与无菌处理需求相容的合适聚合物材料)所制成而为挠性的。啮合夹子510a’和510b’经成形以既夹持在图11的机器人臂端件1100之上,且通过端件1100而朝向彼此偏转。
79.在图9a和图9b中所示的实施例中,填充针座502’显示为包含几个内侧子结构。这种方法允许采用相同的模具而用于通过注射成型所有填充针座而制造,而内侧子结构则适以不同尺寸的填充针管501’。这允许保持低的成本。还构想子结构的其他设置,包括但不限于其中整个填充针座502’是通过注射成型与无菌要求相容的合适聚合物材料所制成的一个整体实体。基于上述,填充针包装900包含第一和第二护套部分,它们一起界定当第一和第二锁定机构部分相互配合时,无菌地包封器具部分的密封腔。
80.鉴于上述,图1的流动路径404(如在这个实施例中使用的)包含:挠性管405;用于将流动路径404无菌地密封到受控环境外壳420的无菌地密封的凸缘;及无菌地密封的填充针包装900。
81.现在转到图9c,无菌地密封的填充针包装900可具有机械地连结到填充针包装900的锁定机构部分的一个的损坏指示器970。在图9c中,损坏指示器970包含横跨弹簧加载构件920a和920b的可撕裂带。当定位孔眼950a和950b被迫分开时,横跨弹簧加载构件920a和920b而设置的损坏指示器970的一部分被不可逆地撕裂。由于分离定位孔眼950a和950b的相同动作也导致在填充针座502’和填充针护套503’之间的密封表面的分离,因此损坏指示器970的断开是对在填充针座502’和填充针护套503’之间的无菌密封的破坏的直接指示。可对以下所述的拭子系统进行相同的防损坏设置。
82.作为以药物产品填充药物容器的工艺的一部分,在一些情况中,可能存在用于以合适的拭子擦拭填充针414、414’的分配尖端以收集潜在污染物种的管理要求。这样的拭子接着通常通过适当合格的实验室而评估,以评估药物分配工艺的无菌状态。为此,在本发明的另一态样中,提供有一种可无菌地密封/不可密封的拭子子系统。在图10中,拭子子系统1000包含拭子保持器1003,其可有用地具有与第9a和9b图的填充针护套503’相同的设计。拭子1006安装在拭子保持器1003内,其中拭子1006的收集尖端1008突出在拭子保持器1003的顶部的上方。这种设置允许通过将分配尖端接触拭子1006的收集尖端1008而擦拭填充针414、414’的分配尖端。拭子保持器1003可为整体注射成型的聚合物拭子保持器。
83.拭子子系统1000进一步包含拭子保持器盖1002,其可有用地具有与图9a和图9b的填充针座502’相同的设计,通过这个修改,拭子保持器盖1002不具有填充针管502’,且拭子保持器盖1002在顶部处被永久地密封。关于所有其它机械操作的态样,填充针护套503’和填充针414’的组合900和拭子子系统1000可为相同的。由于这个原因,拭子子系统1000的机械设计的态样将不在这里进一步地讨论。然而,我们将在下面参考拭子保持器盖1002的啮
合夹子1010a’和1010b’,关于它们与图11的机器人臂端件1100的啮合。我们还将在下面参考分别设置在夹持构件1030a和1030b中的定位孔眼1050a和1050b,关于它们与指状物的啮合。在本说明书中将使用术语“无菌地密封的拭子包装”1000来描述互相无菌地密封的拭子保持器盖1002和含有拭子1006的拭子保持器1003的这种组合。拭子1006被供应用于以无菌地密封拭子包装1000的形式而包装的使用。基于上述,拭子包装1000包含第一和第二护套部分,第一和第二护套部分一起界定当第一和第二锁定机构部分相互配合时,无菌地包封器具部分的密封腔。特别地,拭子保持器盖1002和拭子保持器1003的锁定构件部分可一体地模制。这特别包括结构的弹簧加载构件。
84.图11显示用于图1的机器人臂415的端件1100的一个实施例,端件1100经配置以与图10的拭子子系统1000啮合,且与图9a和图9b的填充针护套503’和填充针414’的组合900啮合。凸缘1110经设置和成形而用于将端件1100附接到图1的机器人臂415。开口1120和1140经设置和成形而分别用于保持填充针414’和拭子保持器盖1002。在填充针414’的情况下,填充针座502’的啮合夹子510a’和510b’与端件1100的端件啮合表面1120a和1120b啮合。
85.程序上,填充针414’如下与端件1100啮合。端件1100在填充针管501’的一部分上向前移动,填充针管501’从填充针414’和连接到填充针管501’的流体路径404的任何相关联的区域突出,直到开口1120直接在填充针414’的上方。在这个工艺中,开口1120c允许端件1100顺利通过填充针管501’。可接着降低端件1100,使得啮合表面1120a和1120b的底部边缘与啮合夹子510a’和510b’的倾斜部分啮合。当端件1100进一步地降低时,啮合夹子510a’和510b’都朝向彼此挠性地偏转,直到啮合表面1120a和1120b通过啮合夹子510a’和510b’的倾斜部分,且啮合夹子510a’和510b’回弹以使它们的平坦表面与端件1100的啮合表面1120a和1120b啮合。这将填充针414’牢固地定位在端件1100中。当填充针414’与端件1100啮合时,夹持构件930a和930b分别设置在狭槽1130a和1130b中,以使得定位孔眼950a和950b可接近。
86.在拭子保持器盖1002的情况中,啮合以相同的方式进行,除了不存在需要类似于1120c的开口的填充针管501’。端件1100简单地移动直到开口1140直接位于拭子保持器盖1002的上方,在端件1100被降低之后,使得啮合夹子1010a’和1010b’的平坦表面以类似于如上所述用于啮合夹子510a’和510b’的方式而与开口1140的表面1140a和1140b啮合。当拭子保持器盖1002与端件1100啮合时,夹持构件1030a和1030b分别设置在狭槽1150a和1150b中,以使得定位孔眼1050a和1050b可接近。
87.当首先使用填充针414、414’和流动路径404时,待分配到容器中的产品首先通过流动路径404和填充针414、414’,以建立稳定且可靠的流动。这个产品的初始体积可分配到以后待设置的起动瓶中。可采用在端件1100上的握柄1160作为用于处理(例如)用于这种起动瓶和类似者的塞子的一般工具。
88.为描述从填充针414’移除填充针护套503’,我们现在转到图12,其中护套移除站413’包含用于与填充针护套503’的定位孔眼950a和950b啮合的护套啮合指状物1220a和1220b。当填充针护套503’(不论具有或不具有填充针414’与其啮合)被推到护套啮合指状物1220a和1220b上时,护套啮合指状物1220a和1220b的倾斜的相互定向迫使填充针护套503’的夹持构件930a和930b分开。这个动作迫使夹持夹子960a和960b分开,且使夹持夹子
960a和960b与填充针座502’的定位凸缘508’脱离。o形环940因此被允许膨胀到其未压缩状态,且填充针414’从填充针护套503’释放。填充针护套503’因此可移除地密封到填充针414’。当不使用时,填充针护套503’被无菌地密封到填充针414’,且可如图13中所示悬挂在悬挂短柱1240a和1240b上。如稍后将描述的,操作者可在受控环境外壳420中安装流动路径404。在那个工艺中,填充针护套503’(具有填充针414’无菌地密封到填充针护套503’)定位在悬挂短柱1240a和1240b上。
89.护套移除站413’还包含用于与拭子保持器1003的定位孔眼1050a和1050b啮合的护套啮合指状物1230a和1230b。当拭子保持器1003(不论具有或不具有拭子保持器盖1002与其啮合)被推到护套啮合指状物1230a和1230b上,护套啮合指状物1230a和1230b的倾斜的相互定向迫使拭子保持器1003的夹持构件1030a和1030b分开。这个动作使拭子保持器盖1002与拭子保持器1003脱离。因此拭子保持器1003可移除地密封到拭子保持器盖1002。当不使用时,无菌地密封到拭子保持器盖1002的拭子保持器1003可如图13中所示在悬挂短柱1250a和1250b上悬挂。如稍后将描述的,在开始在受控环境外壳420中以药物填充药物容器的工艺中,操作者可根据图13将拭子保持器1003无菌密封地安装到悬挂短柱1250a和1250b上的拭子保持器盖1002上。
90.图14a显示通过填充针座502’的啮合夹子510a’和510b’保持无菌地密封的填充针包装900的机器人臂端件1100。图14b显示通过拭子保持器盖1002的啮合夹子子1010a’和1010b’保持无菌地密封的拭子包装1000的机器人手臂端件1100。
91.在操作中,流体路径404无菌地密封到受控环境外壳420,且填充针包装900如图13中所示悬挂在护套移除站413’的悬挂短柱1240a和1240b上。拭子包装1000引入到受控环境外壳420中且如图13中所示悬挂在护套移除站413’的短柱1250a和1250b上。受控环境外壳420现在可使用先前所描述的各种手段的任一个而去污。现在可通过解封填充针414’填充针护套503’而对流体路径进行去保护。这可使用如以手边的图12而于上所解释的机器人臂415而完成。这个步骤留下位于护套啮合指状物1220a和1220b上的填充针护套503’及位于机器人臂端件1100上的填充针414’。
92.拭子保持器盖1002可类似地从拭子保持器1003移除,以将拭子1006暴露于受控环境外壳420中的环境。工艺使拭子保持器1003与位于护套移除站413’的护套啮合指状物1230a和1230b上的拭子2006一起。机器人臂415现在可进行以流体经由填充针414’而填充位于图1中的基座412上的药物小瓶411。在填充工艺期间,填充针414’和拭子保持器盖1002保持驻留在机器人臂的端件1100上。
93.当填充已完成时,机器人臂415自动地使具有填充针414’和拭子保持器盖1002的机器人臂的端件1100移动到护套移除站413’,以使填充针414’的分配末端506’接触拭子1006的暴露尖端1008。
94.使用机器人臂415,填充针护套503’的孔眼950a和950b与护套啮合指状物1220a和1220b啮合,以允许填充针414’被无菌地密封到填充针护套503’,从而保护流体路径404。拭子保持器1003的孔眼1050a和1050b可类似地与护套移除站413’的护套啮合指状物1230a和1230b啮合,以允许拭子保持器1003和拭子保持器盖1002彼此无菌地密封,从而保护拭子2006。流体路径404和密封的拭子包装1000现在可从受控环境外壳420移除。
95.如在图14b中所示,机器人臂的端件1100没有移动零件,且能够同时地承载填充针
包装900和拭子包装1000两者。尽管机器人臂的端件1100和护套移除站413’都没有活动零件,它们能够结合地打开和关闭填充针包装900和拭子包装1000。这通过在护套移除站413’的啮合指状物1220a、1220b、1230a、1230b和填充针护套503’的孔眼950a和950b和拭子保持器1003的孔眼1050a和1050b之间的相互作用,与填充针护套503’和拭子保持器1003的部分的弹簧加载或挠性本质相结合而为可能的。
96.在本发明的一个态样中(以手边的图15而描述),提供有一种用于在受控环境外壳内将流体沿着流体路径传送(1500)到在受控环境外壳内的目的地的方法,方法包含:提供(1510)包含无菌地密封的填充针包装的无菌地密封的流体路径;将流体路径无菌地密封(1520)到受控环境外壳;在将流体路径无菌地密封到受控环境之后,对受控环境外壳进行去污(1530);自动地去保护(1540)在受控环境外壳内的流体路径;在自动地去保护之后,将流体沿着流体路径传送(1550)到目的地;及在传送流体到目的地之后,处置而不重新使用(1570)流体路径。
97.自动地去保护(1540)可为通过自动地操作机器人臂。在将流体路径密封到受控环境外壳之后,可自动地对受控环境外壳进行去污(1530)。提供无菌地密封的流体路径(1510)可包含:提供可移除地和无菌地密封到填充针护套的填充针;及护套可为整体注射成型的聚合物填充针护套。提供无菌地密封的流体路径(1510)可包含提供无菌地密封到填充针的预除菌的管。将流体传送(1550)到目的地可包含将流体传送到细胞培养物、组织培养物、酶溶液、固定化酶的悬浮液、活性成分的混合物和赋形剂的至少一个。传送(1550)流体可为传送无菌流体。在受控环境外壳内的传送(1550)可在隔离器内传送。将流体(1550)传送到目的地可包含将流体传送到微井孔板和用于药物产品的容器的至少一个。
98.方法可进一步包含在将流体传送到目的地之后和在处置流体路径之前自动地保护(1560)流体路径。传送(1550)流体可包含过在滤流体路径中的流体。过滤可为无菌过滤。
99.作为上述方法的一部分,提供有一种用于在受控环境外壳内安装流体路径的方法(1500a),包含:提供(1510)包含无菌地密封的填充针头包装的无菌地密封的流体路径;无菌地密封(1520)流体路径到受控环境外壳;在将流体路径无菌地密封到受控环境外壳之后,对受控环境外壳进行去污(1530);及自动地去保护(1540)在受控环境外壳内的流体路径。自动地去保护可为通过自动操作机器人臂。可在将流体路径密封到受控环境外壳之后,自动地完成对受控环境外壳进行去污。提供填充针可包含提供可移除地和无菌地密封到填充针护套的填充针。提供填充针可包含提供可移除地和无菌地密封到整体注射成型的聚合物填充针护套的填充针。
100.在以手边的图16所述的本发明的进一步的态样中,提供有一种用于从受控环境外壳卸载(1600)包含填充针的流体路径的方法,方法包含:自动无菌地密封(1610)填充针到在受控环境外壳内的整体注射成型的聚合物填充针护套;在无菌地密封(1610)流体路径之后对受控环境外壳进行去污(1640);在去污(1640)之后打开(1650)受控环境外壳;及从受控环境外壳移除(1660)流体路径。方法可进一步包含:用拭子自动地擦拭(1620)填充针的分配末端,且在对受控环境进行去污(1640)之前自动无菌地密封拭子(1630)在拭子包装中;及在打开受控环境外壳之后,从受控环境外壳移除(1670)拭子包装。
101.自动无菌地密封流体路径(1610)可为通过自动地操作机器人臂。在密封(1610)流体路径之后,可自动地完成对受控环境外壳进行去污(1640)。在对受控环境外壳进行去污
(1640)之后,自动地完成打开(1650)受控环境外壳。自动地擦拭(1620)可为通过自动地操作机器人臂。自动无菌地密封(1610)流体路径可为通过自动地操作机器人臂。可在密封流体路径(1610)及密封拭子(1630)之后,自动地完成对受控环境外壳进行去污(1640)。擦拭(1620)可为使用设置在整体注射成型的聚合物拭子保持器中的拭子。
102.作为上述方法的一部分,提供有一种用于对含有具有填充针的流体路径的受控环境外壳进行去污的辅助方法,方法包含:自动无菌地密封(1610)填充针到在受控环境外壳内的整体注射成型的聚合物填充针护套;及在无菌地密封(1610)流体路径之后,对受控环境外壳进行去污(1620)。自动无菌地密封(1610)流体路径可为通过自动地操作机器人臂。还提供有用于对含有设置在拭子保持器中的拭子的受控环境外壳进行去污的方法,方法包含:自动无菌地将拭子保持器密封到在受控环境外壳内的拭子保持器盖(1630);及在将拭子保持器无菌地密封到拭子保持器盖之后,对受控环境外壳进行去污(1640)。拭子保持器自动无菌地密封(1630)拭子保持器到拭子保持器盖可为通过自动地操作机器人臂。
103.在以上所述的实施例中,使用具有与定位壁架啮合的夹持夹子的整体模制的板簧构件将一对注射成型的零件卡扣在一起。这种动作提供确保器具可靠地密封在护套内侧之正向的机械棘爪。但是本领域的普通技术人员将认识到可使用各种其他类型的机构以提供这种类型的动作,包括但不限于基于凸轮的机构、棘轮机构、双稳态连杆、弹簧加载的球、卡扣和闩锁销。
104.在以上所述的实施例中的机构呈现为允许凹形护套和盖状座沿垂直轴线而彼此啮合的配置,但是其他的几何构造也可实现。例如,一对凹形护套部分可以向下面向的蛤壳型配置而部分地包围器具。且虽然护套及其相应的座如以上所述的两个完全分离的零件而优选地制造,但是它们也可被建构为合成的单元,诸如通过以铰炼或系绳而连接它们。
105.以上所述的实施例还在啮合夹子和孔眼中提供分别与机器人臂上的端件和保持站上的突起相互作用的支承表面,这允许机器人臂自动地打开和关闭护套。但是本领域的普通技术人员将认识到也可采用许多其它轴承表面的组合和设置。额外的注记
106.以上的实施方式包括对附随图式的参照,附随图式形成实施方式的一部分。图式通过说明而显示可实施本发明的具体实施例。这些实施例也于此称为“例子”。在这个文件中所参照的所有公开本、专利和专利文件通过引用其全文的方式而并入于此,如同通过引用而单独地并入。若在此文件与通过引用而如此并入的那些文件之间的用法不一致时,则在所并入的参考文件中的用法应被视为对本文件的用法的补充;对于不可调和的不一致,由在本文件中的用法主导。
107.在这个文件中,使用术语“一(a)”或“一(an)”(如在专利文件中常见的)以包括一个或超过一个,独立于“至少一个”或“一或多个”的任何其它实例或用法。在这个文件中,使用术语“或”以指代非排他性的或,使得“a或b”包括“a但不是b”、“b但不是a”及“a和b”,除非另有说明。在所附的权利要求书中,术语“包括(including)”和“其中(inwhich)”用作相应术语“包含(comprising)”和“其中(wherein)”的简明英语的等效物。此外,在以下的权利要求书,术语“包括(including)”和“包含(comprising)”是开放式的,即,包括除了在权利要求中的这样的术语之后所列出的元件之外的系统、装置、制品或工艺仍然被视为落入那个权利要求的范围内。此外,在以下的权利要求书中,术语“第一”、“第二”和“第三”等仅仅用作标记,且不意欲对他们的目标强加数字的要求。
108.于此描述的方法例子可至少部分地为机器或计算机实现的。一些例子可包括编码有指令的有形计算机可读取媒介或机器可读取媒介,指令可操作以将电子装置配置以执行在以上的例子中所描述的方法。这样的方法的实现可包括代码,诸如微代码、组合语言代码、更高级的语言代码,或类似者。这样的代码可包括用于执行各种方法的计算机可读取指令。代码可形成计算机程式产品的部分。此外,代码可在执行期间或在其他时间有形地储存在一或多个可挥发或不可挥发的计算机可读取媒介上。这些计算机可读取媒介可包括但不限于硬盘、可移除的磁盘、可移除的光盘(如,光盘和数码视讯盘)、磁带匣、记忆卡或棒、随机存取内存(ram)、唯读内存(rom)和类似者。
109.以上的描述系意欲为说明性的,而不是限制性的。例如,以上所述的例子(或其一或多个态样)可彼此结合而使用。诸如由本领域的普通技术者在复习以上的描述之后,可使用其他实施例。提供摘要以符合专利法,以允许读者快速地确定技术揭露书的本质。应理解所提交者不用以解释或限制权利要求书的范围或含义。此外,在以上的实施方式中,各种特征可组合在一起,以简化本揭露书。这不应被解释为意指未主张揭露的特征对于任何权利要求是必要的。相反,发明的标的可在于少于特定揭露的实施例的所有特征。因此,以下的权利要求书由此并入实施方式中,其中每一权利要求自身作为单独的实施例。本发明的范围应参考附随的权利要求书,及这些权利要求书所赋予的等效元件的全部范围而确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1