一种全方位精准上肢康复训练装置的制作方法
1.本发明涉及康复设备技术领域,具体的,涉及一种全方位精准上肢康复训练装置。
背景技术:
2.很多疾病或者外伤会导致人手运动功能受损甚至丧失,而手是人类拥有的非常灵巧的运动器官,可以实现许多精细的动作,与我们的日常生活密切相关,所以会给患者的日常生活质量带来严重影响。例如脑卒中患者最常见的后遗症就是偏瘫,其中最难康复的就是手部的运动功能。医学理论和实践证明,肢体损伤的患者为了防止肌肉废用性萎缩,必须要进行有效的肢体训练才能恢复其功能。手部外骨骼机器人能够减轻康复治疗师的负担且能够促进患者参与康复训练的主动性和积极性,从而提高手功能的康复效果,具有重要的意义。
3.现有技术中,虽然很多用于康复人手的设备,采用外骨骼带动患者待康复手动作,唤醒受损伤肢体的肌肉,避免其萎缩,形成运动记忆,起到康复效果,但是,目前康复治疗中,仅仅对肌肉本身进行了康复作用,缺乏对患者康复整体性上的把握,也没有针对不同患者做出变化的康复设备,因此康复治疗效果存在局限性,基于以上问题,亟需一种全方位精准的康复训练装置。
技术实现要素:
4.本发明提出一种全方位精准上肢康复训练装置,解决了现有技术中手部康复设备康复方式单一的问题。
5.本发明的技术方案如下:
6.一种全方位精准上肢康复训练装置,包括:
7.主机体;
8.康复手套,所述康复手套与所述主机体连接;
9.镜像手套,所述镜像手套与所述主机体连接,所述康复手套与所述镜像手套同步动作。
10.所述主机体包括:
11.plc控制单元,所述镜像手套的信号输出端与所述plc控制单元连接,所述plc控制单元的信号输出端与所述康复手套的信号接收端连接。
12.还包括:
13.气动装置,所述气动装置的输出端与所述康复手套连接,所述plc控制单元的信号输出端与所述气动装置的信号接收端连接。
14.所述康复手套包括:
15.掌套,所述掌套与所述主机体连接;
16.指套,所述指套设置在所述掌套上;
17.关节垫,所述关节垫设置在所述指套和所述掌套内,所述关节垫与所述主机体连
接。
18.所述关节垫为凹面。
19.所述康复手套还包括:
20.气囊,所述气囊为伸缩波纹管,所述气囊的长度与指节长度对应设置;
21.连接管,所述连接管用于连接相邻的两个所述气囊;
22.固定架,所述连接管设置在所述固定架上。
23.所述康复手套还包括:
24.滑道,所述固定架滑动设置在所述滑道上;
25.所述固定架包括:
26.滑动底座,所述滑动底座设置在所述滑道上,两个所述滑动底座为一组且所述滑动底座借助所述关节垫连接。
27.所述固定架还包括:
28.连接块,所述连接块一侧与所述滑动底座铰接,所述连接块具有螺纹孔;
29.螺杆,所述螺杆连接所述两个所述连接块,所述螺杆两侧为反向螺纹。
30.还包括:
31.锁紧螺母,所述锁紧螺母设置在所述滑动底座上,用于锁紧所述滑动底座与所述滑道的位置。
32.本发明的工作原理及有益效果为:
33.本发明中,公开了一种全方位精准上肢康复训练装置,主要包括主机体以及分别与主机体连接的康复手套和镜像手套,其中康复手套通过主机体与镜像手套做出相同的动作,工作过程中,镜像手套会穿戴在正常手部,而康复手套会穿戴在康复手套上,在患者进行康复治疗时,单侧待康复患者类型,可以让患者健康手穿戴镜像手套,康复手套穿戴在待康复手上,然后通过健康手的动作赋予镜像手套动作,通过主机体将信息整合到康复手套上,使康复手套具备一样的动作,这种康复方式,患者能通过自己习惯的动作方式,实现康复手的多种不同的康复动作,除了能够唤醒待康复手的肌肉记忆,还能够唤醒大脑对于待康复手的控制记忆,从而实现全方位的康复治疗。
34.本发明利用主机体、康复手套及镜像手套三者的结合,配合上患者自身的康复情况,在康复过程中,通过健康手动作带动待康复手动作,依照患者自身习以为常的动作,不仅实现对肌肉的康复训练,而且能够实现大脑对于待康复手的控制记忆,康复的效果是全方位的,并不仅仅针对于肌肉的单一康复。
35.与现有技术相比,现有的手部的康复训练设备采用控制端实现康复手套的动作,其康复动作单一、没有变化,患者也是机械的被动动作,患者对于康复动作没有掌控与认知,而本发明中的康复动作,与现有技术中的康复有本质上的区别,康复动作是变化的、灵活的、可掌控的,因此康复效果也是全方位覆盖的,解决了现有技术中手部康复设备康复方式单一的问题。
附图说明
36.下面结合附图和具体实施方式对本发明作进一步详细的说明。
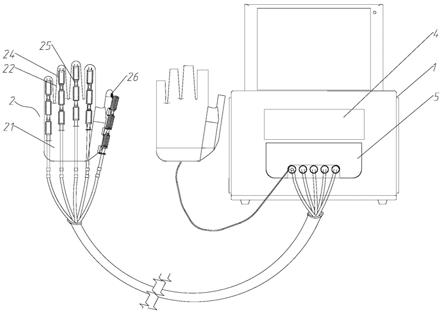
37.图1为本发明整体结构示意图;
38.图2为本发明康复手套结构示意图;
39.图3为图2中a处的局部放大图;
40.图中:1、主机体,2、康复手套,3、镜像手套,4、plc控制单元,5、气动装置,21、掌套,22、指套,23、关节垫,24、气囊,25、连接管,26、固定架,27、滑道,261、滑动底座,262、连接块,263、螺杆,264、锁紧螺母。
具体实施方式
41.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都涉及本发明保护的范围。
42.如图1~图3所示,本实施例提出了一种全方位精准上肢康复训练装置,包括:
43.主机体1;
44.康复手套2,所述康复手套2与所述主机体1连接;
45.镜像手套3,所述镜像手套3与所述主机体1连接,所述康复手套2与所述镜像手套3 同步动作。
46.本实施例中,公开了一种全方位精准上肢康复训练装置,主要包括主机体1以及分别与主机体1连接的康复手套2和镜像手套3,其中康复手套2通过主机体1与镜像手套3做出相同的动作,工作过程中,镜像手套3会穿戴在正常手部,而康复手套2会穿戴在康复手套2上,在患者进行康复治疗时,单侧待康复患者类型,可以让患者健康手穿戴镜像手套3,康复手套2穿戴在待康复手上,然后通过健康手的动作赋予镜像手套3动作,通过主机体1将信息整合到康复手套2上,使康复手套2具备一样的动作,这种康复方式,患者能通过自己习惯的动作方式,实现康复手的多种不同的康复动作,除了能够唤醒待康复手的肌肉记忆,还能够唤醒大脑对于待康复手的控制记忆,从而实现全方位的康复治疗;
47.利用主机体1、康复手套2及镜像手套3三者的结合,配合上患者自身的康复情况,在康复过程中,通过健康手动作带动待康复手动作,依照患者自身习以为常的动作,不仅实现对肌肉的康复训练,而且能够实现大脑对于待康复手的控制记忆,康复的效果是全方位的,并不仅仅针对于肌肉的单一康复。
48.所述主机体1包括:
49.plc控制单元4,所述镜像手套3的信号输出端与所述plc控制单元4连接,所述plc 控制单元4的信号输出端与所述康复手套2的信号接收端连接。
50.本实施例中,在主机体1内安装有plc控制单元4,plc控制单元4起到动作信息的整合与处理,镜像手套3的信号输出端与plc控制单元4连接,plc控制单元4的信号输出端则与康复手套2信号接收端连接,镜像手套3的动作信号传输到plc控制单元4,经过信息处理,将动作进行信号输出,康复手套2就能够做出与镜像手套3相同的动作;除此之外, plc还能够独立发出控制信号,具有多种除了镜像康复方式以外的多种控制模式:抓握模式,通过主机体1的屏幕上的动画演示,给患者以视觉感受,实现五指的动作;拿捏模式,plc 控制单元4输出信号,康复手套2则是会实现对指动作,类似拿捏动作;单指模式,同样是 plc控制单元4输出信号,康复手套2单指活动,更具有针对性;对指模式,实现相对的手指进行康复治疗。
51.还包括:
52.气动装置5,所述气动装置5的输出端与所述康复手套2连接,所述plc控制单元4的信号输出端与所述气动装置5的信号接收端连接。
53.本实施例中,在主机体1中还设置有气动装置5,气动装置5的输出端与康复手套2连接,plc控制单元4与所述气动装置5信号接收端连接,plc控制单元4通过控制气动装置 5实现康复手套2的动作,气动装置5可以是气泵等气动元件。
54.所述康复手套2包括:
55.掌套21,所述掌套21与所述主机体1连接;
56.指套22,所述指套22设置在所述掌套21上;
57.关节垫23,所述关节垫23设置在所述指套22和所述掌套21内,所述关节垫23与所述主机体1连接。
58.本实施例中,康复手套2包括掌套21、指套22及关节垫23,其中掌套21穿戴在手掌上,而指套22与掌套21连接,指套22中是让手指穿戴的,并且指套22会带动手指进行动作,实现康复效果,在指套22上每个对应关节的位置,安装有关节垫23,关节垫23还设置在掌套21内,关节垫23能够实现关节的精准定位,关节垫23通过连接线与主机体1连接,主机体1会通过连接线向关节垫23输入电流,在康复手套2对肌肉进行康复治疗时,关节垫23 也能够对关节进行微电场刺激,关节的润滑液以及筋膜的康复也在微电场的刺激下提升了活性,与现有只进行肌肉康复的设备相比,针对待康复手的康复覆盖面更广,能够达到更快恢复待康复手功能的效果。
59.所述关节垫23为凹面。
60.本实施例中,关节垫23为凹面型,当穿戴康复手套2时,手掌的关节点与关节垫23形成更好的接触,一方面能够保持手掌位置的准确固定,康复手套2带动手掌动作时,手部动作会更加标准,康复效果更好。
61.所述康复手套2还包括:
62.气囊24,所述气囊24为伸缩波纹管,所述气囊24的长度与指节长度对应设置;
63.连接管25,所述连接管25用于连接相邻的两个所述气囊24;
64.固定架26,所述连接管25设置在所述固定架26上。
65.本实施例中,康复手套2还包括气囊24、连接管25及固定架26,气囊24是一个具有伸缩性的波纹管,气囊24膨胀展开的长度与一个指节的长度对应,相邻的气囊24通过连接管 25连接,连接管25与气囊24为一体式连接,在掌套21和指套22上还安装了固定架26,固定架26与连接管25固定设置,一体式的连接方式起到了密封的作用。
66.所述康复手套2还包括:
67.滑道27,所述固定架26滑动设置在所述滑道27上;
68.所述固定架26包括:
69.滑动底座261,所述滑动底座261设置在所述滑道27上,两个所述滑动底座261为一组且所述滑动底座261借助所述关节垫23连接。
70.本实施例中,康复手套2上还安装有滑道27,固定架26滑动设置在滑道27上,固定架 26包括滑动底座261部分,滑动底座261滑动设置在滑道27上,两个相邻的滑动底座261 为一组,相邻的一组滑动底座261之间通过关节垫23连接,在实际工作过程中,可以通过调
节滑动底座261来适应不同大小的手掌,从而确保指关节恰好放置在关节垫23内,并且由于指关节长度与气囊24的长度匹配度高,那么手掌完成的康复动作就越标准,因此,不仅仅解决了肌肉、关节的针对性康复,其康复精准度也非常高。
71.所述固定架26还包括:
72.连接块262,所述连接块262一侧与所述滑动底座261铰接,所述连接块262具有螺纹孔;
73.螺杆263,所述螺杆263连接所述两个所述连接块262,所述螺杆263两侧为反向螺纹。
74.本实施例中,在滑动底座261上还铰接有连接块262,连接块262上设置有螺纹孔,螺杆263穿过两个相邻的螺杆263,螺杆263的侧为反向的螺纹段,当旋转螺杆263时,连接块262相互靠近或者远离,连接块262会带动滑动底座261沿着滑道27靠近或者远离,从而实现关节垫23的对位,连接块262铰接能够保证手部在做屈伸时不会发生干涉,此外,螺杆263在气囊24充气膨胀时,会对气囊24起到导向限制作用,避免气囊24由于充气压力过大,出现倾斜,导致康复动作不到位的情况。
75.还包括:
76.锁紧螺母264,所述锁紧螺母264设置在所述滑动底座261上,用于锁紧所述滑动底座 261与所述滑道27的位置。
77.本实施例中,在滑动底座261上还设置了锁紧螺母264,锁紧螺母264旋入后,会顶住滑道27,从而实现滑动底座261的锁定,起到稳定的效果。
78.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1