用于睡眠监测治疗仪的治疗头组件总成的制作方法
1.本发明涉及智能设备,具体说是一种用于睡眠监测治疗仪的治疗头组件总成,其主要适用于无感化睡眠监测及失眠的辅助治疗。
背景技术:
2.现有的助眠安神设备主要包括两种,一种为固定式的理疗床或理疗椅,另一种为便携式的眼罩或头盔。对于固定式助眠设备,有借助心理干预治疗失眠的,如授权公告号cn209827908u公开的“易于调节角度的精神心理科用辅助治疗设备”;也有借助理化方式,如低频振动、物理按摩、给予安神助眠药物、给予患者头部电磁刺激、给氧或播放音乐等方式,使患者身心处于一种放松状态以改善睡眠质量,如申请公布号cn111991672a的发明专利申请公开的“智能助眠机器人”,如申请公布号cn108670678a的发明专利申请公开“医疗用多功能按摩床”,如授权公告号cn209437855u的实用新型专利公开的“睡眠障碍治疗装置”。
3.上述现有的技术方案中,往往仅是针对机械结构或治疗方式的小部分改进,并不能实现设备的智能化控制,使用过程中仍需借助大量的人工干预,且由于结构设计上的缺陷,导致其可控维度较少,无法实现全自动化控制,存在使用不方便、治疗效果不直观,用户体验差的缺点。
技术实现要素:
4.本发明的目的是提供一种用于睡眠监测治疗仪的治疗头组件总成,从根本上解决了上述问题,其具有结构简单紧凑、使用方便快捷、自动化程度高等优点。
5.为实现上述目的,本发明提供了如下技术方案:该用于睡眠监测治疗仪的治疗头组件总成包括骨架结构、通过骨架结构所在平面沿线性运动的伸展组件,其技术要点是:伸展组件包括滑轨、与滑轨配合的线性驱动机构、滑动限位在滑轨上的伸缩杆、限位在伸缩杆末端的辐射组件。
6.进一步的,骨架结构上设有用于输入扭矩的中心支撑板。
7.进一步的,骨架结构上固定有辐射组件。
8.进一步的,辐射组件包括固定在相应支撑板上的圆盘扣件、与圆盘扣件旋转扣合的碗状扣件、限位在碗状扣件内的盛有助眠药材的辐射罩、通过支架限位的反射罩、用于限位支架的支架安装盘、限位在碗状扣件前端的橡胶头、限位在橡胶头内的红外光电传感器。
9.本发明的有益效果:整体结构上,通过带有主动撤离避障功能的agv机构作为驱动底座带动装置整体的xy平面任意平移旋转。当agv移动到使用者位置后,通过两级升降驱动机构调整治疗头组件总成在z轴上的垂直距离。同时,升降驱动机构还设有治疗头角度调整组件,可在步进电机的驱动下绕z轴调整治疗头的旋转角度,以达到完全适应多种治疗模式的目的。
10.为使设备应对多种治疗模式,agv机构应能运行至座椅及床底部。这对agv小车的
结构提出要求。具体结构上,agv机构采用了悬挂驱动系统,在车底盘的中部设置“下凹”结构,使小车采用钣金嵌入式悬挂结构,尽可能减小整体高度的情况下使用简洁的结构实现了万向轮与驱动轮的统一高度,简化后的结构使车架与减震悬挂融为为一体。将带有弹簧结构的驱动轮组件通过悬挂支撑板“悬挂”在车底盘上,进而提高了agv机构在运行过程中的稳定性,具有结构简单、减小设备高度,标准化程度高,制造费用低等特点。同时有效降低了整体高度,提高了其越障能力。agv机构采用两套独立的悬挂式驱动轮组件,在车底盘万向辅助轮的配合下,在xy平面内实现转向与移动等。为使设备在座椅治疗模式下运行至桌椅下面,agv小车采用钣金嵌入式悬挂结构,尽可能减小整体高度的情况下使用简洁的结构实现了统一辅助(万向)轮与驱动轮的高度,在保证压缩高度的前提下,将弹簧机构整合在驱动轮结构内,使简化后的结构使车架与减震悬挂融为一体。进一步的,配合位于前壳体上的避障模块,在特定场地环境内有效实现自主化移动。agv机构自带可充电电源,从而实现无线状态下的使用。通过增加自主寻路功能,实现自动回位充电。综上所述,agv机构具有结构简单、减小设备高度、标准化程度高、制造成本低等特点。
11.多级升降驱动机构采用两级升降驱动机构,将agv机构的车底盘作为基座,在基座上垂直设置一对边柱作为基础结构,通过“内驱动”的方式实现多级升降,在设备待机状态时尽可能减小占地面积,节省空间。作为线性驱动机构的电动推杆尺寸更小,并可实现多级大行程传动,能实现包覆外壳等下的高精度无极伸缩,可实现多节同时伸缩或接力是伸缩。
12.具体结构上,本发明能实现多级推杆任意伸缩,使小行程电动推杆机构实现多级大行程传动,能实现包覆外壳等下的高精度伸缩,可实现多节同时伸缩或接力是伸缩。此结构具有多节包覆独立外壳不干扰、节省回缩后的占地面积,传动精度高,传动效率高,噪音小等特点。在边柱内设置有一级电动推杆驱动升降的一级滑动体,在一级滑动体内继续设置二级电动推杆和“类l形”的二级滑动体,最终实现多级推杆任意伸缩。“类l形”的二级滑动体下半段(竖直段)作为升降部分,其上半段(水平段)内还设有可用于驱动治疗头组件总成沿
±
x向整体平移和绕z轴旋转的调整机构,从而实现治疗头组件总成位置的多维度调节。
13.治疗头组件总成设置一个中部治疗头和若干侧部治疗头,其中,中部治疗头可在三级组件的驱动下沿
±
x向线性运动,各侧部治疗头组件还可通过位于中心部顶壳和中心部底壳内的滑轨、电动推杆、位于电动推杆输出端的伸缩杆、位于伸缩杆底部的与滑轨配合的滑块实现各侧部治疗头的线性移动。例如,当治疗头组件总成位于图1所示位置时,侧部治疗头则可沿
±
x向和
±
y向线性移动,调整其相对于中心治疗头的位置。当配合如图9所示的治疗头角度调整组件时,治疗头组件总成则可绕z轴自由旋转。辐射组件采用碗状扣件与底盘的旋转扣合结构,方便药材的即使更换,使用方便安全。
14.全机由7寸触控屏及人机交互界面完成功能设置、参数设置,完成自动化操作。通过多种传感器及电动机构实现全逻辑电动控制,引导完成多种模式动作。进一步的,装置整体还可在多位置集成毫米波雷达系统,实时监测人体的心跳,呼吸及人体微动情况,治疗结束评估睡眠情况。通过实时监控患者入眠信息,睡眠监测治疗仪可实现自动停止助眠音乐,调整唤醒时间、智能转换治疗模式及完成治疗后主动撤出等功能。
15.综上所述,本发明可实现治疗头的自由升降和旋转等多维度控制,实现装置整体的自主化寻路和归位功能,配合相应的控制软件实现助眠功能的完全自动化。
附图说明
16.图1为本发明睡眠监测治疗仪的等轴侧视结构示意图。
17.图2为本发明agv机构的等轴侧视结构示意图。
18.图3为图2的爆炸结构示意图。
19.图4为图3中驱动轮组件的爆炸结构示意图。
20.图5为本发明升降驱动机构的等轴侧视结构示意图。
21.图6为本发明升降驱动机构的爆炸结构示意图i。
22.图7为本发明升降驱动机构的爆炸结构示意图ii。
23.图8为本发明升降驱动机构的爆炸结构示意图iii。 图9为图8中a部分的局部放大结构示意图。
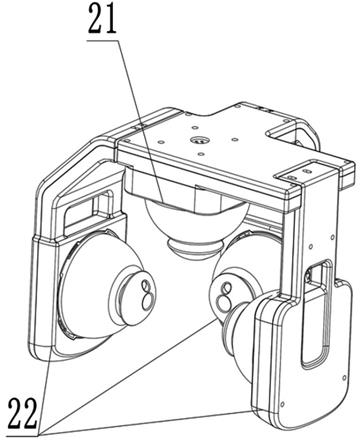
24.图10为本发明治疗头组件总成的等轴侧视结构示意图。
25.图11为本发明治疗头组件总成的爆炸结构示意图。
26.图12为图11中b部分的局部放大结构示意图。
27.图13为本发明辐射组件的爆炸结构示意图i。
28.图14为本发明辐射组件的爆炸结构示意图ii。
29.图15为本发明睡眠监测治疗仪用于坐立位时的使用状态参考图。
30.图16为本发明睡眠监测治疗仪用于平卧位时的使用状态参考图。
31.附图标记说明:1 agv机构、11 车底盘、12 支架组件、121 支脚、122 散热孔、123 支脚加强筋、124 悬挂支撑板、13 驱动轮组件、131 轮毂电机、132 轮毂连接板、133 轮毂支撑板、134 轮毂压板、135 弹簧、136 导向柱、137 导向件、138 减震垫、14 辅助轮组件、15 驱动器、16 电源;2 治疗头组件总成、21 中心部治疗头、211 中心部顶壳、212 中心部底壳、213 中心支撑板、214 中心部衔接壳体、215 中心部辐射组件、22 侧部治疗头、221 侧部电动推杆、222 侧部滑轨、223 侧部滑块、224 侧部伸缩杆、225 侧部外盖、226 侧部内盖、227侧部辐射组件、23 辐射组件、231 橡胶头、232 红外光电传感器、233 碗状扣件、234 圆盘扣件、235 辐射罩、236 支架、237 反射罩、238支架安装盘;3 控制器组件、31 触控显示器、32 控制按钮(电源按钮、复位按钮、急停按钮)、33 电器组件、34(声呐)避障组件;4 升降驱动机构、41 一级组件、411 一级升降前壳、412 一级升降后壳、413 一级滑轨、414 一级滑块、415 一级滑动体、416 一级电动推杆、417 边柱、4171 边柱支脚、418 螺柱、42 二级组件、421 二级升降前壳、422 二级升降后壳、423 二级滑轨、424 二级滑块、425 二级滑动体下半段、426 二级电动推杆、43 三级组件、431 三级上壳体、432 三级下壳体、433 三级滑轨、434 三级滑块、435二级滑动体上半段、436 三级电动推杆、437 扬声器、438 治疗头角度调整组件、4381 步进电机、4382 主动锥齿轮、4383 从动锥齿轮、4384 传动轴、4385 传动轴承组件、4386 拨片、4387 微动开关、4388 槽口光电开关、439治疗头组件支撑板、4391 步进电机支撑部、44 定位板。
具体实施方式
[0032] 以下结合附图,通过具体实施例详细说明本发明的内容。如图1所示,该睡眠监测治疗仪包括agv机构1、治疗头组件总成2、控制器组件3、升降驱动机构4。
[0033]
实施例1 agv机构
以下以设置一对驱动轮组件为例说明agv机构的详细结构。如图2~3所示,agv机构1包括车底盘11、驱动轮组件13、若干辅助轮组件14、用于控制驱动轮组件13的驱动器15、通过电池挡板(附图未标记)限位在车底盘11上的电源16,为使结构更加紧凑,将驱动器15附接在电源16侧部。支架组件12通过支脚121固定在车底盘11上,支脚121上设有支脚加强筋123。车底盘11中部为“下嵌部”结构,主要配合限位驱动轮组件13,实现悬挂功能。具体而言,如图4所示,驱动轮组件13包括带有驱动轮(附图未标记)的轮毂电机131、用于限位轮毂电机131的相互配合的轮毂连接板132和轮毂支撑板133、限位在轮毂支撑板133上的导向件137、通过导向件137导向的导向柱136、限位在悬挂支撑板124内的轮毂连接板132、限位在轮毂连接板132与轮毂支撑板133之间的弹簧135、限位在轮毂连接板132与导向件137之间的减震垫138。“下嵌部”的两侧向内凹陷,为驱动轮组件预留安装空间,”下嵌部”外侧各对应设有一悬挂支撑板124,驱动轮组件13通过轮毂连接板132“悬挂”在悬挂支撑板124上。当设置一对驱动轮组件13时,通常设置在车底盘的“中驱式”以输出前进或后退的动力,避免前驱或后驱导致的侧滑现象。
[0034]
为作为多级驱动机构的活动底座,多级驱动机构的中心位于车底盘11的一侧,在agv机构行驶过程中避免发生倾覆,为此在车底盘前后侧各设置一对底脚(附图未标记),进一步的为提高运行流畅性,在其前后侧还各设有一对万向辅助轮组件14。底脚的下支撑面略高于辅助轮组件14的行驶面,驱动轮组件13采用了悬挂式结构,配合底脚和辅助轮组件14可有效翻越坑洼路面。底脚的下支撑面即作为驱动轮弹性收缩时,车底盘所能下降的最低线,在生产过程中人为限定其可适用的路面坑洼度。底脚通过螺栓组件固定在底盘底部,可根据驱动轮组件的弹簧减振幅度自由更换,从而达到最佳的减震效果。当其中一侧的驱动轮组件陷入深坑路面时,辅助轮组件14作为滚动支撑减小行驶阻力,底脚支撑在水平面上放置进一步下陷,驱动轮组件13在自身驱动机的带动下即可轻松驶离,而避免倾覆。
[0035]
当然,本领域普通技术人员在本发明的设计构思下,也可适当增加驱动轮组件13的数量,并适应性改变底脚和辅助轮组件14的位置,例如,设置两对驱动轮组件,将底脚减少为一对设置在两对驱动轮组件之间,辅助轮组件仍为两对分别设置在两对驱动轮组件的外侧,图略。
[0036]
实施例2多级驱动机构由于电动推杆本身的结构限制,需要匹配负载与行程距离(通常情况下负载较大时,则行程距离较短)。当行程距离超过市售的电动推杆最大行程时,则必须要设计成多电动推杆联动的“内驱式”的多级升降机构,如果升降级数为n,则由下至上,由外向内依次设置的第一至第n升降组件的中空壳体。由内向外设置虽然也能达到相似的目的,但通常情况下,为保证结构的稳定性而采用由外向内设置的多级机构。各级升降组件的中空壳体内分别设置一驱动装置(如电动推杆),相邻升降组件的电动推杆交错设置,以维持装置整体的平衡。“逐级嵌套”过程中,采用滑轨滑块配合的方式进行,例如在相邻的下部中空壳体内设置滑轨,在相邻的上部中空壳体外设置与该滑轨配合的滑块,并通过匹配滑轨长度与推杆行程的方式设置提升高度。该多级驱动机构的限制主要在于最小一级升降组件的中空壳体对电动推杆设置位置的限制。
[0037]
如图15~16所示,通过多级驱动机构可实现治疗头组件总成在两个极限位置之间任意位置的停留,从而有效提高了适用范围。在不使用时,将机构整体调整至最低收缩位,
则可节省占用空间。
[0038]
实施例3升降驱动机构本实施例为实施例2的多级驱动机构在本发明技术方案中的具体应用实例,以
±
y方向上的两级驱动结构(一级、二级组件及
±
x方向上的一级驱动结构(三级组件)为例进行说明。如图5~9所示,升降驱动机构4包括依次设置的一级组件41、二级组件42和三级组件43。其中,一级升降前壳411和一级升降后壳412配合装配在一级滑动体415上,一级电动推杆416 的固定端铰接限位在车底盘11上,活动端限位在一级滑动体415的顶部内侧,一级滑动体415的顶部内侧与其中部之间设有螺柱418,边柱417通过其边柱417支脚121设置在车底盘11上,边柱417内侧设有一对一级滑轨413,一级滑动体415外侧设有若干与一级滑轨413线性滑动配合的一级滑块414。边柱417之间沿高度方向间隔设置若干定位板44,防止由于滑轨或边柱纵向尺寸较大时导致的结构偏移,而影响滑块在滑轨中滑动过程中的平滑性,进而保证升降驱动机构4整体的稳定性。
[0039]
二级升降前壳421和二级升降后壳422配合装配在二级滑动体下半段425上,二级电动推杆426的固定端铰接限位在一级滑动体415内侧的底部,活动端限位在二级滑动体下半段425的顶部内侧,一级滑动体415内侧设有二级滑轨423,二级滑动体下半段425外侧设有若干与二级滑轨423线性滑动配合的二级滑块424。二级焊接件整体呈带有倒角的“类l形”结构,二级焊接件下半段425通过二级滑轨423和二级滑块424滑动限位于一级焊接件415内。
[0040]
三级组件43通过相互配合的三级上壳体431和三级下壳体432固定在二级滑动体上半段435内,二级滑动体上半段435内固定有一对三级滑轨433,三级上壳体431或三级下壳体432内限位有三级电动推杆436,三级电动推杆436的固定端铰接在三级上壳体431或三级下壳体432内,活动端铰接在治疗头组件支撑板439上(图9中,该固定端已被步进电机4381遮挡,其活动端仍可见),治疗头组件支撑板439底部设有若干与三级滑轨433配合的三级滑块434,治疗头组件支撑板439上设置治疗头角度调整组件438。为配合治疗头组件总成2沿
±
x向的移动,在三级下壳体432和二级滑动体上半段435上设置了条形的活动槽(图中未示出),为方便实时反馈控制结果,二级滑动体上半段435内还设有扬声器437。
[0041]
治疗头角度调整组件438包括通过步进电机支撑部4391限位的步进电机4381、设置在步进电机4381输出端的主动锥齿轮4382、设置在治疗头组件支撑板439上的传动轴承组件4385、限位在传动轴承组件4385(例如,主要包括截面为t形的轴承座、限位在轴承座内的传动轴承)内的传动轴4384、设置在传动轴4384上的与主动锥齿轮4382啮合的从动锥齿轮4383、设置在传动轴4384上的拨片4386、设置在治疗头组件支撑板435上的与拨片4386配合的若干微动开关4387和槽口光电开关4388。从而在步进电机4381动作时,配合拨片4386产生相应控制机构开关的通断,实现具有不同功能的智能化控制。
[0042]
上述实例中的槽口光电开关4388和微动开关4387的数量与设置位置仅仅为一种举例,当需要实现多维度控制时,可沿传动轴4384设置更多的控制开关以实现相应的功能。
[0043]
实施例3治疗头组件总成如图10~12所示,治疗头组件总成2包括中心部治疗头21以及若干侧部治疗头22,本实施例以三个侧部治疗头22为例进行说明。
[0044]
中心部治疗头21包括相互配合的中心部顶壳211和中心部底壳212,中心部顶壳
211内固定有中心支撑板213,中心部治疗头21内通过设置中心支撑板213与传动轴4384固定,中心部底壳212底部设有中心部衔接壳体214,中心部衔接壳体214上设置中心部辐射组件215。
[0045]
侧部治疗头22包括相互配合的侧部外盖225和侧部内盖226,固定在侧部外盖225和侧部内盖226上的侧部伸缩杆224,若干固定在侧部伸缩杆224底部的侧部滑块223,与侧部滑块223配合的固定在中心部底壳212内的侧部滑轨222,固定在侧部电动推杆221内的用于驱动侧部伸缩杆224的侧部电动推杆221,设置在侧部内盖226内侧的侧部辐射组件227。
[0046]
如图13~14所示,中心部辐射组件215和侧部辐射组件228可采用相同的组成结构,例如该辐射组件23可包括固定在相应支撑板上的圆盘扣件234、与圆盘扣件234旋转扣合的碗状扣件233、限位在碗状扣件233内的盛有助眠药材的辐射罩235、通过支架236限位的反射罩237、用于限位支架236的支架安装盘238、限位在碗状扣件233前端的橡胶头231、限位在橡胶头231内的红外光电传感器232。通过将碗状扣件233和圆盘扣件234设置成“旋扣”结构,方便快速更换辐射罩235内的药材。同时,在碗状扣件233内设置龙骨结构,有效提高了结构刚性。
[0047]
实施例4 作动原理以四个治疗头为例进行说明,睡眠监测治疗仪配合床架使用,通过升降驱动机构4调整治疗头组件总成2的高度,在使用者平躺于床架上时,使其面部刚好正对中心部治疗头21,且保持一定距离。通过治疗头内的辐射组件215缓慢将药物成分弥散在使用者头部周围。当使用者产生睡意时,头部可能会发生些许偏移,此时配合各治疗头内的红外光电传感器232实时监测各治疗头相对于使用者头部的距离,并配合相应的侧部电动推杆221、侧部滑轨222、侧部滑块223以及侧部伸缩杆224实时调整治疗头与使用者头部的相对距离。通过睡眠监测系统识别人体数据,若使用者已经入睡,agv机构1驱动睡眠监测治疗仪整体自动驶离。同时,为避免驶离过程中触碰到人或其他物体,还在其背部设置了避障组件34,常见的如声呐避障传感器。
[0048]
实施例5如图15~16所示,装置整体可配合床或座椅使用,通过红外光电传感器232实时获取人体位置信号,在升降驱动装置4的带动下使治疗头组件总成4随振动床实现节律性波动,配合助眠音乐模拟柔和的“海浪”等来自大自然的白噪音达到使人放松的目的。
[0049]
为方便说明本发明的动作原理,在附图中建立了虚拟的xyz坐标系,各坐标轴仅用于表示相应部件动作时的相对位置,并不用于限定。
[0050]
文中提及的线性驱动机构或电动推杆的固定端,并非是指完全固定不动,该固定端的装配方式通常是与相应部件铰接设置,在部件之间配合误差的作用下,可能存在小范围的摆动,其固定仅是相对于活动端的大幅度活动而命名。
[0051]
文中提及的“步进电机通过其输出端啮合的变向组件带动另一支撑板旋转”,主要是指设置在步进电机4381输出端的主动锥齿轮4382驱动其啮合的从动锥齿轮4383而将水平轴扭矩转换为竖直轴扭矩的“变向”。
[0052]
对于起到修饰性功能的整机外壳,需要根据实际生产进行适应性调整,其分形方式并不唯一,只要能起到保护内部结构以及便于装配的目的即可。由于其设置方式对整机的内部结构实际影响不大,因此并未展开描述。
[0053]
为方便说明主要结构,以省略附图中的螺栓、螺母、角铁等连接或支撑结构,本领域技术人员应当知晓的,为实现零件的连接固定,在实际生产中必然会采用上述零件。而螺栓与螺母配合的连接方式仅是本领域用于零件配合的其中一种常规技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1