柔性部件、柔性探入器及内窥镜装置的制作方法
1.本发明涉及医疗器械领域,特别涉及一种柔性部件、柔性探入器及内窥镜装置。
背景技术:
2.内窥镜是现代医学诊疗中常用的检测仪器,可以经口腔进入胃内或经其他天然孔道进入体内,还可以经手术做的小切口进入人体内。医生可以借助内窥镜看到x射线不能显示的病变,对诊断病情非常有用。其中蛇骨结构是内窥镜中常用的部件。
3.目前的蛇骨结构主要分为两类:第一类是蛇骨结构的表面采用一定的镂空结构,使得蛇骨结构的任意局部都是刚性连接,且具有一定的弯曲和回弹性能;第二类是将若干蛇骨单元通过枢接结构串联形成一个整体,且具有一定的弯曲性能。无论哪种结构,都需要通过传动丝控制蛇骨结构的弯曲。其中对于第一类蛇骨结构,常规的做法是将传动丝从蛇骨壁厚或双层壁之间穿过,导致蛇骨壁厚较大,增大了蛇骨整体外径,使器械不容易通过狭小的部位,而且蛇骨在弯曲时也会增大传动丝的拉力,蛇骨弯曲难度增大,也使得传动丝和蛇骨之间的摩擦力较大,传动丝磨损严重,故要求传动丝有更高的强度。对于第二类蛇骨结构,枢接结构增大了蛇骨弯曲时的摩擦力,限制了蛇骨弯曲自由度,使蛇骨不能朝任意方向范围,而且蛇骨的弯曲刚度不足,蛇骨整体也不具有回弹性,影响了器械的使用性能,同时会产生磨损,影响蛇骨的尺寸精度和轴向刚度。
技术实现要素:
4.为了解决现有技术中所存在的技术问题,本发明的目的在于提供一种柔性部件、柔性探入器及内窥镜装置,在保证柔性部件具有较好的回弹性和刚度的基础上,可实现柔性部件朝任意方向的弯曲,同时还能够减小柔性部件的整体外径,使柔性探入器能够通过更狭小的部位,而且还能够减小传动丝受到的摩擦力,提高传动丝的使用寿命,降低柔性部件的弯曲操作难度。
5.为实现上述目的,根据本发明的第一个方面,提供一种柔性部件,包括柔性主体和径向限位件,所述柔性主体为镂空管状结构,所述镂空管状结构包括多个轴向依次分布的柔性单元,至少部分所述柔性单元的内壁上设置有所述径向限位件,所述径向限位件朝向所述柔性主体的内腔凸出以径向限位传动丝。
6.可选地,所述柔性部件至少在最远端的一个所述柔性单元以及最近端的一个所述柔性单元的内壁上分别设置一组径向限位结构,一组所述径向限位结构包括沿所述柔性主体的周向间隔分布的多个所述径向限位件。
7.可选地,每个所述柔性单元的内壁上设置有一组径向限位结构,或者,所述柔性主体的远端部分每隔n个所述柔性单元设置一组径向限位结构,或者,所述柔性主体的近端部分每隔m个所述柔性单元设置一组径向限位结构;其中,一组所述径向限位结构包括沿所述柔性主体的周向间隔分布的多个所述径向限位件,n和m均为正整数。
8.可选地,n的取值小于m的取值。如n的取值为1,m的取值为2。
9.可选地,所述径向限位件设置有限位孔,所述限位孔用于穿设所述传动丝;所述柔性单元的外壁上设置有贯通的安装孔,所述径向限位件的一部分结构固定在所述柔性单元的外壁上,另一部分结构穿过所述安装孔并延伸至所述柔性单元的内腔内。
10.可选地,所述径向限位件包括一体式的支撑臂和固定座,所述固定座设置有所述限位孔,所述支撑臂固定在所述柔性单元的外壁上,所述固定座穿过所述安装孔并部分延伸至所述柔性单元的内腔内。
11.可选地,所述支撑臂的厚度小于所述柔性主体的壁厚。
12.可选地,所述支撑臂的壁厚与所述柔性主体的壁厚的比值为0.1~0.8。
13.可选地,所述安装孔被配置为沿所述柔性主体的轴向的宽度为所述柔性单元沿轴向宽度的50%~70%。
14.可选地,所述柔性部件还包括轴向限位件,用于设置在所述传动丝的远端;当所述传动丝受力被驱动向所述柔性部件的近端方向移动时,所述轴向限位件能够阻止所述传动丝的远端从所述径向限位件上脱落。
15.可选地,所述轴向限位件包括套管,所述套管用于套设在所述传动丝的远端,所述径向限位件具有限位孔,所述套管的最小横截面宽度大于所述限位孔的孔径。
16.可选地,所述柔性部件还包括远端结构件,所述柔性主体的远端与所述远端结构件连接,所述远端结构件的外表面设置有远端凹槽结构,所述远端凹槽结构用于增大所述远端结构件与保护套之间的接触力。
17.可选地,所述柔性部件还包括近端结构件,所述柔性主体的近端与所述近端结构件连接,所述近端结构件的外表面设置有近端凹槽结构,所述近端凹槽结构用于增大所述近端结构件与保护套之间的接触力。
18.可选地,所述近端结构件的壁中设置有若干轴向贯通的布线孔,若干所述布线孔用于分别径向限位所述传动丝和导线,且所述近端结构件具有轴向贯通的近端内腔,所述近端内腔用于径向限位工具通道管。
19.可选地,所述镂空管状结构包括:
20.沿轴向间隔设置的多个镂空部,以及,
21.形成于相邻的两个所述镂空部之间的所述柔性单元;
22.每个所述镂空部的周向上具有多个连接梁,相邻的两个所述连接梁和相邻的两个所述柔性单元形成镂空槽。
23.可选地,所有所述柔性单元沿轴向的宽度相等或不相等,和/或,所有所述柔性单元间的间隙相等或不相等。
24.可选地,所有轴向分布的所述连接梁沿周向的宽度相等或不相等,和/或,所有轴向分布的所述连接梁沿轴向的长度相等或不相等。
25.为实现上述目的,根据本发明的第二个方面,提供一种柔性探入器,包括主管体以及任一项所述的柔性部件,所述主管体的远端连接所述柔性部件。
26.可选地,所述柔性探入器还包括保护套,所述保护套包覆所述柔性部件。
27.可选地,所述柔性探入器还包括相连接的驱动装置和传动丝组,所述传动丝组包括若干传动丝,所述驱动装置用于通过所述传动丝组控制所述柔性部件的弯曲状态。
28.为实现上述目的,根据本发明的第三个方面,提供一种内窥镜装置,包括内窥镜模
组以及任一项所述的柔性探入器,所述内窥镜模组设置在所述柔性部件的远端。
29.在本发明提供的柔性部件、柔性探入器及内窥镜装置中,柔性主体为一体式的镂空管状结构,保证了柔性部件具有良好的刚度和回弹性,确保了柔性探入器的使用性能;同时由于径向限位件在柔性主体的内腔中径向限位传动丝,使得柔性部件壁厚较小,减小了柔性部件的整体外径,使柔性探入器容易通过狭小的空间,更好的进行手术治疗;而且柔性部件在弯曲时不会增大传动丝的拉力,减小了传动丝和柔性部件之间的摩擦力,降低了传动丝的磨损,提高了传动丝的使用寿命,且柔性部件弯曲难度降低,使手术操作更容易,也能够保证柔性部件的尺寸精度,实现柔性部件朝任意方向的弯曲。
30.在本发明提供的柔性部件、柔性探入器及内窥镜装置中,所述柔性主体的远端部分每隔n个所述柔性单元设置一组径向限位结构,或者,所述柔性主体的近端部分每隔m个所述柔性单元设置一组径向限位结构,一组所述径向限位结构包括沿所述柔性主体的周向间隔分布的多个所述径向限位件;以此方式,使得径向限位件在柔性部件的轴向上非等间距或等间距布置;优选n的取值小于m的取值,如此构造,使径向限位件在柔性部件的轴向上非等间距布置,使传动丝在柔性部件弯曲时任意位置上受到的拉力尽可能相等或接近,从而进一步减小传动丝与柔性部件之间的摩擦力,降低柔性部件弯曲难度,并进一步提高传动丝的使用寿命;而且将柔性主体的远端部分设置更密集的径向限位件,使远端部分的转弯半径更小,更容易通过迂曲部位。
附图说明
31.本发明的实施方法以及相关实施例的特征、性质和优势将通过结合下列附图进行描述,其中:
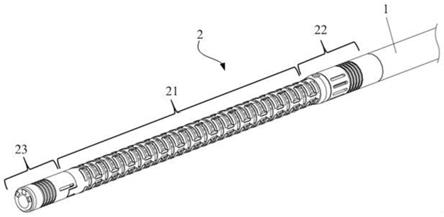
32.图1是本发明优选实施例的柔性探入器的结构示意图,其中柔性部件被保护套包裹;
33.图2是本发明优选实施例的柔性探入器的结构示意图,其中去掉了柔性部件上的保护套;
34.图3是本发明优选实施例的柔性部件的立体结构示意图,其中传动丝自柔性部件的一端穿入并轴向延伸至另一端;
35.图4是图3所示a位置的柔性部件的局部放大图;
36.图5是本发明优选实施例的柔性部件的立体结构示意图,其中省略了图3中的传动丝;
37.图6是图5所示的柔性部件的正视图;
38.图7是本发明优选实施例的镂空管状结构的局部结构示意图;
39.图8是本发明优选实施例的径向限位件的立体结构示意图;
40.图9是图8所示的径向限位件的正视图;
41.图10是本发明优选实施例的径向限位件、柔性主体和传动丝的装配结构的剖面示意图;
42.图11a是本发明优选实施例的径向限位件与柔性主体分离示意图;
43.图11b是本发明优选实施例的径向限位件与柔性主体分离的剖面示意图;
44.图12是本发明优选实施例的远端结构件的立体结构示意图,其中远端结构件的内
部穿设有导线;
45.图13是本发明优选实施例的远端结构件的结构示意图,其中省略了图12中的导线;
46.图14是本发明优选实施例的远端结构件的正视图;
47.图15是本发明优选实施例的近端结构件的立体结构示意图,其中近端结构件的内部穿设有传动丝套管和导线;
48.图16是本发明优选实施例的近端结构件的立体结构示意图,其中省略了图15中的导线和传动丝套管;
49.图17是本发明优选实施例的近端结构件的正视图;
50.图18是本发明优选实施例的柔性部件的立体结构示意图,其中省略了近端结构件、远端结构件,并在近端示意了多根控制柔性部件弯曲的传动丝;
51.图19是本发明优选实施例的柔性部件的每个柔性单元的外壁上固定设置有径向限位结构的正视图;
52.图20是本发明优选实施例的柔性部件发生不同方向弯曲的状态图。
53.附图标记说明如下:
[0054]1‑
主管体;2
‑
柔性部件;21
‑
柔性主体;211
‑
镂空部;212
‑
柔性单元;213
‑
连接梁;214
‑
安装孔;215
‑
远端突出结构;216
‑
近端突出结构;22
‑
近端结构件;221
‑
近端凹陷结构;222
‑
辅助槽;223
‑
通孔;224
‑
布线孔;225
‑
近端内腔;226
‑
近端凹槽结构;23
‑
远端结构件;231
‑
远端安装槽;232
‑
远端凹陷结构;233
‑
远端凹槽结构;24
‑
径向限位件;241
‑
限位孔;242
‑
支撑臂;243
‑
固定座;244
‑
凹槽;25
‑
轴向限位件;251
‑
套管;26
‑
内窥镜模组;261
‑
镜头;262
‑
光源;27
‑
位置传感器;271
‑
位置传感器导线;28
‑
传动丝套管;3
‑
保护套;4
‑
工具通道管;5
‑
传动丝;
[0055]
g
‑
柔性单元之间的间隙;w1
‑
柔性单元的宽度;w2
‑
连接梁的宽度;l2
‑
连接梁的长度;a1
‑
纵向轴线。
具体实施方式
[0056]
以下将结合本发明实施例中的附图,对本发明优选实施例中的技术方案进行清楚、完整地描述。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0057]
如在本发明中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,除非内容另外明确指出外。如在本发明中所使用的,术语“或”通常是以包括“和/或”的含义而进行使用的,除非内容另外明确指出外。如在本发明中所使用的,术语“若干”通常是以包括“至少一个”的含义而进行使用的,除非内容另外明确指出外。如在本发明中所使用的,术语“至少两个”通常是以包括“两个或两个以上”的含义而进行使用的,除非内容另外明确指出外。
[0058]
术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者至少两个该特征。需要说明的是,采用“远端”、“近端”作为方位词,该方位词为介入医疗器械领域惯用术语,其中“远端”或“末端”表示手术过程中远离操作者的一端,“近端”表示手术过程中靠近操作者的一端。轴向,指平行于医疗器械远端中心和近端中
心连线的方向;径向,指垂直于轴向的方向;周向,指围绕轴向的方向。
[0059]
图1和图2是本发明优选实施例的柔性探入器的结构示意图。如图1和图2所示,本发明实施例提供一种柔性探入器,包括主管体1和柔性部件2;所述主管体1通常为软管,具有一定的柔软性和韧性;优选的,所述柔性探入器还包括保护套3,保护套3包覆整个柔性部件2。所述主管体1的远端连接柔性部件2,所述柔性部件2具有轴向贯通的内腔;所述主管体1的内腔与柔性部件2的内腔轴向连通。通常,所述柔性探入器还包括工具通道管4,用于插入主管体2和柔性部件2的内腔并轴向延伸;所述工具通道管4的内部用来装载手术工具,以提供手术工具用的通道,手术工具可以是各种结构,如活检钳、激光消融设备或其它的外科手术工具;所述工具通道管4轴向贯穿整个柔性探入器。所需理解,柔性部件2具有柔性,当其受力后能够变形,而在失去作用力后自身能够恢复原来形状。
[0060]
参阅图2,所述柔性部件2包括柔性主体21;进一步的,所述柔性部件2还包括近端结构件22和远端结构件23;从近端至远端,所述近端结构件22、柔性主体21和远端结构件23轴向依次连接。进一步的,所述保护套1包覆近端结构件22、柔性主体21和远端结构件23。参阅图3,所述柔性主体21为镂空管状结构。在所示的实施方式中,所述柔性主体21在非挠曲状态时具有柱体形状,并且沿纵向轴线a1延伸。
[0061]
进一步的,所述柔性探入器还包括传动丝组,所述传动丝组包括若干传动丝5,所述传动丝5的数量根据柔性部件2需要控制的弯曲自由度的数量来设定,本技术对此没有要求。所述柔性探入器通过传动丝组控制柔性部件2沿任意方向的弯曲。在本实施例中,所述传动丝5的数量为四根,传动丝两两一组用于分别控制柔性部件2朝不同方向弯曲。进一步的,所述柔性探入器还包括与传动丝组连接的驱动装置,所述驱动装置用于通过所述传动丝组控制柔性部件2的弯曲状态。所述驱动装置可包括驱动轮和电机;所述驱动轮和电机都集成在柔性探入器近端的器械盒中。所述电机运转后驱动驱动轮转动,所述驱动轮进而驱使传动丝5运动。所述传动丝5穿过主管体1和柔性部件2,且一端连接柔性主体21的远端,另一端连接驱动轮。
[0062]
参阅图6和图7,所述镂空管状结构为由管材切割加工而成的镂空结构,所述镂空结构包括沿轴向间隔设置的多个镂空部211;相邻的镂空部211之间形成柔性单元212,镂空部211绕镂空管状结构的周向设置,各镂空部211与各柔性单元212平行设置;各镂空部211在周向上具有多个连接梁213,相邻的两个连接梁213和相邻的两个柔性单元212形成镂空槽(未标注),连接梁213和镂空槽间隔设置,连接梁213用于连接轴向相邻的两个柔性单元212。其中镂空槽沿周向的两端优选经过圆弧过渡处理,以防止应力集中。可以理解,由于连接梁213和镂空槽的间隔设置,两个柔性单元212在连接梁213的连接下可以相对弯曲。应理解,本技术通过连接梁213和柔性单元212的结构,使柔性主体21沿轴向任意相邻部位刚性连接,而且还使得在任意弯曲部位,传动丝5受到的力比较均匀,减小了传动丝5所受到的摩擦力,提高传动丝5的使用寿命。
[0063]
本技术并不限制镂空部211的数量、类型、布置或形状。在各种实施例中,柔性主体21可以具有任何数量、类型、形状和布置的镂空部211。镂空部211形成具有提供轴向的弯曲和扭转刚度的最佳平衡的图案。镂空槽基本垂直于纵向轴线a1被形成。镂空部211允许柔性主体21在多维度中弯曲。在一些实施例中,镂空部211的较高的空间频率可以对应于较高的柔性。具体的,在一些实施方式中,镂空部211包括连接相邻的柔性单元212的多个连接梁
213,镂空部211还包括多个镂空槽,镂空槽和连接梁213沿着镂空管状结构的周向间隔设置。在一些实施例中,轴向相邻的镂空槽和连接梁213分别沿轴向对齐设置,也即,轴向相邻的镂空槽在同一垂直投影面上的投影完全重叠,轴向相邻的连接梁213在同一垂直投影面上的投影完全重叠;此处,“轴向相邻的连接梁213”是指沿着镂空管状结构的轴向,位于柔性单元212两端上最接近的两个连接梁213。当然在其他实施例中,轴向相邻的镂空槽和连接梁213分别沿轴向错开设置,也即,轴向相邻的镂空槽在同一垂直投影面上的投影不完全重叠,轴向相邻的连接梁213在同一垂直投影面上的投影不完全重叠。所需理解,同一垂直投影面指的是相同的垂直投影面,该垂直投影面为垂直于柔性主体的轴线的投影平面。
[0064]
更详细的,如图7所示,相邻两个柔性单元212之间形成有间隙g,也即镂空部211的最小宽度;每个柔性单元212沿柔性主体的轴向的宽度为w1;每个连接梁213沿柔性主体的轴向的长度为l2,连接梁213沿柔性主体的周向的宽度为w2。本技术对间隙g、柔性单元的宽度w1、连接梁213的长度l2以及宽度w2不作具体的限制。所有柔性单元212的宽度w1可以相等或不相等,和/或,所有柔性单元212间的间隙g可以相等或不相等。所有轴向分布的连接梁213的宽度w2可以相等或不相等,和/或,所有轴向分布的连接梁213的长度l2可以相等或不相等。
[0065]
参阅图4,所述柔性部件2还包括径向限位件24,用于径向限位传动丝5;所述传动丝5用于自近端穿入柔性部件2,并沿轴向延伸至柔性部件2的远端;具体地,传动丝5的远端与柔性主体21的远端连接,传动丝5的近端穿过主管体1后与驱动装置连接。其中至少部分柔性单元212的内壁上设置有径向限位件24;所述径向限位件24朝向柔性主体21的内腔凸出(即向柔性主体的纵向轴线方向突伸)以径向限位传动丝5。
[0066]
与现有技术相比,本发明的柔性主体21为一体式的镂空管状结构,使柔性部件2具有良好的刚性和回弹性,并能够沿任意方向弯曲,确保了柔性探入器的使用性能。而且柔性部件2在弯曲时不会增大传动丝5的拉力,减小了传动丝5和柔性部件2之间的摩擦力,降低了传动丝5的磨损,提高了传动丝5的使用寿命,且柔性部件2的弯曲难度降低,使手术操作更容易,也能够保证柔性部件2的尺寸精度。同时由于径向限位件24在柔性主体21的内腔中径向限位传动丝5,使得柔性部件2的壁厚较小,减小了柔性部件2的整体外径,使柔性探入器容易通过狭小的空间,更好的进行手术治疗。
[0067]
具体的,在一实施方式中,所述柔性主体21的壁厚可以达到0.1~0.2mm,更优选为0.13mm。此外,需说明的是,所述镂空管状结构优选为单层管,而非多层管。
[0068]
本实施例中,优选所述柔性主体21至少在最远端的一个柔性单元212的内壁上设置有一组径向限位结构,以及在最近端的一个柔性单元212的内壁上设置有一组径向限位结构;所述一组径向限位结构包括沿柔性主体21的周向间隔分布的多个径向限位件24。应知晓,所述一组径向限位结构中的径向限位件24的数量,根据传动丝5的数量进行设定,如传动丝5为四根,则四根传动丝5分别由一个径向限位件24在径向上进行限位。但是应理解,每根传动丝5在轴向上可以设置多个径向限位件24。而且一组径向限位结构中的多个径向限位件24通常关于镂空管状结构的纵向轴线a1对称设置。
[0069]
在所示的实施例中,每个柔性单元212的内壁上设置一组所述径向限位结构,此时,轴向分布的所有径向限位件24在轴向上等距离布置。在另一较佳实施例中,在部分柔性单元212的内壁上设置一组径向限位结构,如间隔1个或2个或更多个柔性单元设置一组径
向限位结构,此时,轴向分布的所有径向限位件24在轴向上可以等距离布置,也可以不等距离布置。进一步优选的,所述柔性主体21的远端部分每隔n个柔性单元212设置一组径向限位结构,和/或,在柔性主体21的近端部分每隔m个柔性单元212设置一组径向限位结构;n和m均为正整数,n和m的取值可以相等或不相等;当n的取值与m的取值不相等时,使得径向限位件24在柔性部件2的轴向上非等间距布置;当n的取值与m的取值相等时,使得径向限位件24在柔性部件2的轴向上等间距布置。较优的,n的取值小于m的取值,如n的取值为1,m的取值为2;此时,所述远端部分的径向限位件24在轴向上的间距小于所述近端部分的径向限位件24在轴向上的间距;以此方式来有效的确保传动丝5在柔性部件2弯曲时任意位置上受到的拉力尽可能相等或接近,也即,在任意弯曲部位传动丝5受到的力比较均匀,从而提高传动丝5的使用寿命;而且将柔性主体2的远端部分设置更密集的径向限位件24,使远端部分的转弯半径更小,更容易通过迂曲部位。应理解,所述远端部分,是指靠近柔性主体21的远端的部分;所述近端部分,是指靠近柔性主体21的近端的部分;本技术对远端部分的范围和近端部分的范围没有特别的要求。
[0070]
参阅图4,所述柔性主体21的最远端的一个柔性单元212的内壁上设置有径向限位件24,所述径向限位件24与柔性主体21为分体制造后组装在一起。所述径向限位件24例如通过粘接或者焊接固定在柔性主体21上。
[0071]
参阅图8和图9,在一实施例中,所述径向限位件24设置有周向闭合的限位孔241,用于穿设传动丝5。所述限位孔241的中心轴线与柔性主体21的纵向轴线a1平行。当然在其他实施例中,所述径向限位件24也可不通过限位孔241进行限位,而是通过卡合、夹持或其他方式限位传动丝5。而且所述限位孔241也可以是周向不闭合的通孔。
[0072]
所述径向限位件24可以是各种形状,本技术对此不作限制。进一步地,为了降低工艺难度,所述径向限位件24的一部分结构固定在柔性单元212的外壁上,另一部分结构穿过柔性单元212上的安装孔214后延伸至柔性单元212的内腔内。此时,所述径向限位件24的一部分高度(即壁厚)与柔性主体21的壁厚重叠,可有效减小柔性部件2的壁厚。优选的,所述径向限位件24包括一体式的支撑臂242和固定座243;所述固定座243设置有限位孔241;所述支撑臂242固定在柔性主体21的外壁上;所述固定座243穿过安装孔214并部分延伸至柔性主体21的内腔内。
[0073]
请参阅图10,以及图11a~图11b,所述柔性主体21的外壁上设置有贯通的安装孔214。所述固定座243通过安装孔214伸入柔性主体21的内腔内,以使传动丝5穿过固定座243上的限位孔241。所述支撑臂242通过粘接或焊接的方式固定在柔性主体21的外壁上,以防止径向限位件24整体发生位移。所述支撑臂242的形状优选与柔性主体21的外轮廓的形状匹配,如支撑臂242为圆弧形状。应理解,所述径向限位件24通过支撑臂242固定在柔性主体21的外壁上,降低了工艺难度,同时由于径向限位件24覆盖在柔性单元212的安装孔214处,使得在工作过程中二者能够共同受力,从而确保柔性部件整体的刚性和可回弹性。
[0074]
所述安装孔214可以是各种形状,如弧形、长方形、椭圆形等规则形状,还可以是异形。所述安装孔214优选被配置为沿柔性主体的轴向的宽度为柔性单元212的宽度w1的50%~70%。此外,所述安装孔214的延伸方向不限于径向,也即,径向限位件24除了垂直地插入柔性主体21的安装孔214中外,还可以倾斜地插入或呈弯的弧形插入。因此,可以理解为,本技术不限于垂直于纵向轴线a1的方向打孔制作安装孔214。
[0075]
进一步优选的,所述支撑臂242的厚度t小于柔性主体21的壁厚。更优选的,所述支撑臂242的壁厚t与柔性主体21的壁厚的比值为0.1~0.8,如比值为0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8;如此可有效减少柔性部件2的整体外径值。可选的,所述柔性主体21的壁厚为0.13mm,所述支撑臂242的壁厚t为0.05mm,两者比值约为0.38。
[0076]
继续参阅图9,所述支撑臂242优选具有凹槽244,具体设置在固定座243与支撑臂242相连接的区域。凹槽244能够使径向限位件24更可靠地卡设在安装孔214中,使其不易松动掉落。
[0077]
参阅图4,所述柔性部件2优选还包括轴向限位件25,用于设置在传动丝5的远端;当所述传动丝5受力被驱动向柔性部件2的近端方向移动时,所述轴向限位件25能够阻止传动丝5的远端从径向限位件24上脱落。所述轴向限位件25可包括套管251,所述套管251套设在传动丝5的远端,所述径向限位件24具有周向封闭的限位孔241,所述套管251的最小横截面宽度大于限位孔241的孔径。
[0078]
参阅图5,为了将柔性主体21的近端和远端分别与近端结构件22和远端结构件23连接,所述柔性主体21的最远端设置有远端突出结构215,用来与远端结构件23配合连接;同时所述柔性主体21的最近端设置有近端突出结构216,用于与近端结构件22配合连接。当然,在其他情况下,可将突出结构替换为凹陷结构,或者凹陷结构和突出结构的组合。
[0079]
参阅图12,在一实施方式中,所述柔性探入器被配置为还包括内窥镜模组26,具体在远端结构件23的末端设置有内窥镜模组26,以通过内窥镜模组26获取体内图像。所述内窥镜模组26包括镜头261和光源262,镜头261和光源262均设置在远端结构件23的端面上,且镜头261和光源262都连接有导线。进一步的,所述柔性探入器还包括位置传感器27,固定在远端结构件23上,所述位置传感器27能够识别柔性探入器的远端的位置。所述位置传感器27亦连接有导线。其中所有导线沿向近端方向(如图12箭头所示方向)轴向贯穿整个柔性探入器。所述远端结构件24上的位置传感器27的数量优选为两个,且位置传感器27较佳地为磁传感器。
[0080]
进一步地,本发明一优选实施例还提供一种内窥镜装置,包括内窥镜模组26和柔性探入器,内窥镜模组26设置在柔性部件2的远端。
[0081]
参阅图13和图14,所述远端结构件23的外壁上设置有远端安装槽231,用于设置位置传感器27。优选的,所述位置传感器27通过胶水或焊接等方式与远端安装槽231固定连接。可选的,所述远端结构件23的外壁上还设置有远端凹陷结构232,用于与柔性主体21的远端突出结构215配合连接,所述远端突出结构215插入远端凹陷结构232即可卡合固定。优选的,所述远端突出结构215还可通过胶水或焊接等方式与远端凹陷结构232固定连接,连接更为牢固可靠。进一步优选的,所述远端安装槽231设置为镂空结构,以通过远端安装槽231灌注胶水,使远端结构件23与柔性主体21更牢固的连接;或者,通过远端安装槽231进一步焊接远端结构件23与柔性主体21。进一步的,所述远端结构件23的外壁上设置有远端凹槽结构233,所述远端凹槽结构233的形状不限定,如螺旋槽或环形槽等均可;所述远端凹槽结构233用于存储胶水,以加强远端结构件23与保护套1之间的连接。
[0082]
参阅图15和图16,所述近端结构件22的近端较佳地连接传动丝套管28,传动丝套管28套设传动丝5。在实际使用中,所述传动丝套管28不延伸进入柔性主体21,传动丝套管28向近端方向(如图15中箭头所示方向)延伸穿过主管体1。因此,每根传动丝5在主管体1内
的部分套设有传动丝套管28,而在柔性部件2内的部分未套设传动丝套管28。进一步的,所述近端结构件22上设置有位置传感器27,位置传感器27的导线271沿向近端方向贯穿整个柔性探入器。
[0083]
具体的,在一实施例中,所述近端结构件22的远端面设置有近端凹陷结构221,用于与柔性主体21的近端突出结构216配合连接;所述近端突出结构216插入近端凹陷结构221即可卡合固定。为了加强连接,所述近端结构件22的外壁上设置有若干镂空的辅助槽222,用于添加胶水或便于焊接,以通过胶水或焊接等方式固定传动丝套管28和近端结构件22。优选的,所述辅助槽222还可作为近端安装槽,近端安装槽用于安装位置传感器27。类似的,所述近端结构件22上的位置传感器27较佳地为两个。
[0084]
优选的,所述近端结构件22的外壁上设置有至少一个通孔223,用于经由该通孔223灌注胶水,使柔性主体21的近端与近端结构件22加强连接,或者经由该通孔223焊接柔性主体21的近端与近端结构件22以加强连接。进一步的,所述近端结构件22的壁中设置有若干轴向贯通的布线孔224,若干布线孔224可沿近端结构件22的周向间隔排列,若干布线孔22用于分别穿设传动丝5和各个导线以实现径向限位,且不同器件的导线穿设在不同的布线孔224中。进一步的,所述近端结构件22具有轴向贯通的近端内腔225,近端内腔225用于通过工具通道管4以实现径向限位。优选,所述近端结构件22的外壁上设置有近端凹槽结构226,所述近端凹槽结构226的形状不限定,如螺旋槽或环形槽等均可;所述近端凹槽结构226可用于存储胶水,以加强近端结构件22与保护套1之间的连接。
[0085]
接下去结合图18至图20,并结合图2和图3,对本发明的工作过程作进一步的说明。
[0086]
如图18和图19所示,可通过四根传动丝5控制柔性部件2的弯曲,所有传动丝5穿入柔性部件2,且每根传动丝5的一端固定在柔性主体21的远端,另一端穿过各径向限位件24、近端结构件22和主管体1后,固定在近端的驱动轮上,驱动轮通过电机提供动力;当想让柔性部件往某一方向弯曲时,部分电机朝某一方向转动,驱动轮拉动传动丝5,使得径向限位件24附近的单元间隙缩小,与此同时,另一部分径向限位件24附近的单元间隙势必会变大,那么就需要其余的电机朝相反方向转动,通过驱动轮释放另一部分传动丝5的拉力,这样通过电机之间的配合,最终实现柔性部件朝着某一方向弯曲。具体地,如图20所示,可通过传动丝5控制柔性主体21朝某一方向弯曲,得到b1所示的弯曲状态,进一步可通过传动丝5控制柔性主体21朝另一方向弯曲,得到b2所示的弯曲状态;由此实现柔性部件2朝任意方向的弯曲。
[0087]
最后,所应理解,在本发明实施例提供的技术方案中,由于柔性主体为一体式的镂空管状结构,使得柔性部件具有良好的刚性和回弹性,而且能沿任意方向弯曲,确保了柔性探入器的使用性能;并且传动丝在柔性部件弯曲时任意位置上受到的拉力基本相等或相近,从而减小了传动丝所受到的摩擦力,提高了传动丝的使用寿命,也降低了柔性部件弯曲难度;另外,传动丝通过柔性部件内腔中的径向限位件进行限位,而非穿过柔性部件的壁厚,因此,充分利用了柔性部件的内部空间,可有效的减小柔性部件的壁厚,降低柔性部件的整体外径;尤其当径向限位件非等距固定在柔性部件上时,即,远端部分的径向限位件在轴向上分布的距离与近端部分的径向限位件在轴向上分布的距离不相等,通常远端部分的径向限位件的轴向间距小于近端部分,此时,传动丝在柔性部件弯曲时任意位置上受到的拉力更均匀,可以进一步减小传动丝的摩擦力,提高传动丝的使用寿命,而且当柔性主体的
远端部分设置更密集的径向限位件时,远端部分的转弯半径更小,更容易通过迂曲部位。另需说明的是,本发明通过近端结构件上的孔和槽对导线、传动丝和工具通道管进行径向限位,有利于柔性部件在弯曲时减小这些零件相互缠绕和扯断的可能。再则,本发明通过远端结构件和近端结构件上的凹槽结构,加强了保护套和远端结构件以及近端结构件之间的密封性能和连接强度。
[0088]
上述描述仅是对本发明优选实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1