一种免外力机械多段式自助升降病床的制作方法
1.本发明涉及医疗器械领域,尤其是一种自助升降病床。
背景技术:
2.在患者住院期间,有一部分时间都需要在病床上进行休息,而在进行手术或者转移病区过程中,通常需要将病人从病床转移到运输床上,并将该过程称为过床,而现有的过床方式通常需要家属或护工进行人工搬运,但是由于要耗费人力以及搬运时容易造成二次伤害。虽然一些技术方案中会将病床做成电动升降时,但是仍然存在成本较贵,电控较为繁琐的问题。另一方面,在医生检查或者病人进行生活活动时,时长需要将病床升高,现阶段通常为手摇式,对于一些行动不便的患者来说较为麻烦。所以,如何设计一个成本较低,操作简便,可自助升降并可过床的病床成为了急需解决的技术问题。
技术实现要素:
3.本发明要解决的问题是提供一种免外力机械多段式自助升降病床。
4.为了解决上述技术问题,一种免外力机械多段式自助升降病床,包括使用病床以及移动病床,所述使用病床以及移动病床均包括病床本体,所述病床本体包括床架以及设置于床架上的活动床板,所述床架一侧设置有将活动床板进行升降或转移到移动病床上的驱动机构,所述驱动机构包括驱动单元,为驱动单元提供移动场所的驱动轨道以及为驱动单元提供动力的动力源,所述驱动单元可分别与活动床板固定连接,并沿着驱动轨道的轨迹做升降运动,所述驱动单元包括驱动件,控制件以及锁止件,所述驱动轨道包括设置在使用病床上的第一轨道以及设置在移动病床上的第二轨道,第一轨道与第二轨道拼接形成完整轨道,所述控制件可控制活动床板并沿着第一轨道与第二轨道至移动病床上。
5.采用了上述结构后,通过设置第一轨道以及第二轨道,将第一轨道与第二轨道互相拼合并配合使用相应的控制件,驱动件形成过床以及简单升降的技术效果。这样多段式的升降方式既解决了卧床患者需要临时升降的相应问题,还实现了不依靠人工搬运自助过床的技术效果。
6.作为本发明的进一步改进,所述第一轨道以及第二轨道均为半圆形上的左半圆弧以及右半圆弧,所述锁止件设置于左半圆弧的顶点处当使用病床单独使用时,控制件可控制活动床板至锁止件处。
7.采用了上述结构后,半圆形设置的活动轨道符合过床时的运动轨迹,既能实现前段升降功能,又能实现后段过床功能,而锁止件的设置则提高了病床在各个使用段时的稳定性。
8.作为本发明的进一步改进,所述锁止件为铰接设置于左半圆弧顶点处的单向封闭片,并且单向封闭片的顶部设置有阻挡块,阻挡块与封闭片之间形成凹槽,并且该凹槽一侧可适配于第一轨道的外壁处,当控制件移动至单向封闭片处时,单向封闭片与顶部的阻挡块同时作用,阻挡控制件继续在第一轨道移动,所述右半圆弧上位于与左半圆弧连接处还
设置有横向摆放的触发片,当左半圆弧与右半圆弧连接形成一个轨道时,触发片抵住并顶开单向封闭片,使凹槽脱离外壁,封闭片上摆从而轨道畅通。
9.采用了上述结构后,锁止件的设置需要满足如下两个条件,1、能够很好的在只有升降而无过床的状态下对移动的控制件进行阻挡,2、当形成完整的轨道时,又要同时保证整个轨道的畅通,完成全部的过床动作。根据上述两点技术问题,本专利的技术方案是采用了一种单向阻挡的模式,通过阻挡块和封闭片在单向上阻挡使用病床上的活动床板进一步移动,而当两个轨道结合时,利用另一个轨道上的触发片来使封闭片平行,从而不阻挡控制件的进一步移动,完成过床。
10.作为本发明的进一步改进,所述第一轨道和第二轨道的内壁上还设置有用于增加控制件在轨道中运动时阻尼的橡胶件。
11.采用了上述结构后,由于机械式的驱动通常不会是线形的,所以,在轨道上设置带有阻尼的橡胶件,可使机械驱动更加线形化,让患者在升降或者过床过程中更加的平稳。
12.作为本发明的进一步改进,所述控制件包括与活动床板连接的升降杆,所述升降杆与滑动轨道连接处设置有滚轮,所述升降杆与滑动轨道连接处设置有滚轮,与升降杆连接处为一体式固定连接,所述驱动件包括设置于活动床板下方的压缩弹簧,所述控制件还包括控制压缩弹簧压缩或弹开状态的转化器,当需要进行机械上升时,转化器控制压缩弹簧为弹开状态,弹簧克服患者重力使升降杆做上升运动,从而使升降杆上的滚轮沿着滑动轨道进行滑动,完成上升动作,当需要过床时,将两个床进行拼接,第一轨道和第二轨道形成完整的滑动轨道,转化器控制压缩弹簧为弹开状态,弹簧克服患者重力使升降杆做上升运动,从而使升降杆上的滚轮沿着滑动轨道进行滑动,当滑动至移动病床处时,转化器控制压缩弹簧为压缩状态,完成过床动作。
13.采用了上述结构后,滚轮的设置可以帮助活动床板更好的沿着轨道进行移动,压缩弹簧作为驱动件可以在脱离电控的基础上实现驱动的技术效果,而转化器的设置则帮助压缩弹簧控制压缩状态,从而让患者控制弹簧是否需要工作,并完成过床动作。而第一轨道与第二轨道的设置则分别代表了不同的功能,独立使用第一轨道时,通过压缩弹簧的弹力,将活动床板向上提升,从而带动升降杆在第一轨道内移动,由于升降杆与活动床板固定设置,而升降杆的顶端又设置有滚轮,这样活动床板就会根据轨道的形状进行移动。
14.作为本发明的进一步改进,所述压缩弹簧的数量为四个,分别设置于活动床板下的四个顶角,所述转化器包括分别设置于压缩弹簧上的第一磁铁,设置于活动床板底部的第二磁铁以及磁性与第二磁铁相反的第三磁铁,所述第二磁铁以及第三磁铁设置于一个转盘上,所述第二磁铁与第一磁铁的磁性相同,所述转盘包括供患者操作的操作端,患者通过旋转转盘来控制第二磁铁或者第三磁铁露出并与第一磁铁作相应的吸引或排斥动作,所述转盘的数量为4个,并且转盘之间通过齿条联动,所述使用病床上的第一磁铁与移动病床上的第一磁铁磁性相反,当需要过床时,患者控制旋转转盘,将第二磁铁露出并旋转至第一磁铁的正上方,磁铁相斥,弹簧弹开活动床板,使患者移动到移动病床上,而移动病床上的第一磁铁与使用病床上的第二磁铁磁性相反,呈相吸状态,完成过床动作。
15.采用了上述结构后,通过磁铁的磁性来控制弹簧的状态转化,当患者正常使用病床时,患者的重力加磁铁的吸力大于等于弹簧的弹力,当患者需要过床时,患者的重力小于磁铁的斥力加弹簧的弹力,从而可以克服轨道内的阻尼,床板可在活动轨道中移动。而患者
只需旋转转盘,来让不同磁性的磁铁与弹簧上的磁铁进行配合产生相应的吸力与斥力,过床时,使用病床上的磁铁与弹簧上的磁铁为相斥状态,移动病床上的磁铁与弹簧上的磁铁为相吸状态。转盘的数量为四个,并且转盘之间通过齿条互相联动,通过旋转一个转盘就可达到同时对四个弹簧上的磁铁进行吸合或排斥。
附图说明
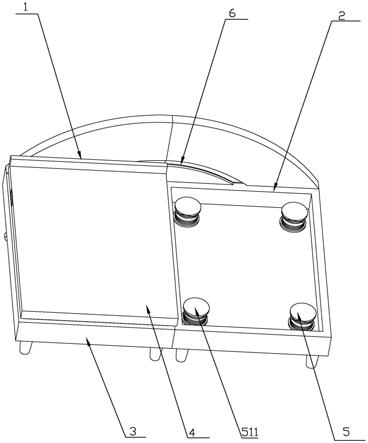
16.图1所示为使用病床及移动病床拼合状态示意图;
17.图2所示为使用病床及移动病床拼合状态床架与轨道结构示意图;
18.图3所示为使用病床床架与床板分离状态示意图;
19.图4所示为单向封闭片封闭状态示意图;
20.图5所示为单向封闭片与轨道爆炸示意图;
21.图6所示为移动病床床架结构示意图;
22.图7所示为移动病床转化器结构示意图;
23.图8所示为转化器平面结构示意图。
具体实施方式
24.使用病床1,移动病床2,床架3,活动床板4,驱动轨道6,第一轨道61,第二轨道62,单向封闭片53,触发片54,升降杆521,滚轮522,压缩弹簧511,转化器523,第一磁铁5111,第二磁铁5332,第三磁铁5234,转盘5235。
25.如图1
‑
图7所示,一种免外力机械多段式自助升降病床,包括使用病床1以及移动病床2,所述使用病床1以及移动病床2均包括病床本体,所述病床本体包括床架3以及设置于床架上的活动床板4,所述床架3一侧设置有将活动床板4进行升降或转移到移动病床上的驱动机构,所述驱动机构包括驱动单元,为驱动单元提供移动场所的驱动轨道6以及为驱动单元提供动力的动力源,所述驱动单元可分别与活动床板固定连接,并沿着驱动轨道6的轨迹做升降运动,所述驱动单元包括驱动件,控制件以及锁止件,所述驱动轨道包括设置在使用病床上的第一轨道61以及设置在移动病床上的第二轨道62,第一轨道61与第二轨道62拼接形成完整轨道,所述控制件可控制活动床板并沿着第一轨道61与第二轨道62至移动病床上。通过设置第一轨道61以及第二轨道62,将第一轨道61与第二轨道62互相拼合并配合使用相应的控制件,驱动件形成过床以及简单升降的技术效果。这样多段式的升降方式既解决了卧床患者需要临时升降的相应问题,还实现了不依靠人工搬运自助过床的技术效果。
26.所述第一轨道61以及第二轨道62均为半圆形上的左半圆弧以及右半圆弧,所述锁止件设置于左半圆弧的顶点处当使用病床单独使用时,控制件可控制活动床板至锁止件处。半圆形设置的活动轨道符合过床时的运动轨迹,既能实现前段升降功能,又能实现后段过床功能,而锁止件的设置则提高了病床在各个使用段时的稳定性。
27.所述锁止件为铰接设置于左半圆弧顶点处的单向封闭片53,并且单向封闭片53的顶部设置有阻挡块531,阻挡块531与封闭片之间形成凹槽,并且该凹槽一侧可适配于第一轨道61的外壁处,当控制件52移动至单向封闭片53处时,单向封闭片53与顶部的阻挡块同时作用,阻挡控制件继续在第一轨道移动,所述右半圆弧上位于与左半圆弧连接处还设置
有横向摆放的触发片54,当左半圆弧与右半圆弧连接形成一个轨道时,触发片54抵住并顶开单向封闭片53,使凹槽脱离外壁,封闭片上摆从而轨道畅通。锁止件的设置需要满足如下两个条件,1、能够很好的在只有升降而无过床的状态下对移动的控制件进行阻挡,2、当形成完整的轨道时,又要同时保证整个轨道的畅通,完成全部的过床动作。根据上述两点技术问题,本专利的技术方案是采用了一种单向阻挡的模式,通过阻挡块和封闭片在单向上阻挡使用病床上的活动床板进一步移动,而当两个轨道结合时,利用另一个轨道上的触发片54来使封闭片53平行,从而不阻挡控制件的进一步移动,完成过床。
28.所述第一轨道61和第二轨道62的内壁上还设置有用于增加控制件在轨道中运动时阻尼的橡胶件。由于机械式的驱动通常不会是线形的,所以,在轨道上设置带有阻尼的橡胶件,可使机械驱动更加线形化,让患者在升降或者过床过程中更加的平稳。
29.所述控制件包括与活动床板连接的升降杆521,所述升降杆521与滑动轨道连接处设置有滚轮522,与升降杆521连接处为一体式固定连接,所述驱动件51包括设置于活动床板下方的压缩弹簧511,所述控制件52还包括控制压缩弹簧511压缩或弹开状态的转化器523,当需要进行机械上升时,转化器523控制压缩弹簧511为弹开状态,弹簧克服患者重力使升降杆做上升运动,从而使升降杆上的滚轮沿着滑动轨道进行滑动,完成上升动作,当需要过床时,将两个床进行拼接,第一轨道和第二轨道形成完整的滑动轨道,转化器控制压缩弹簧为弹开状态,弹簧克服患者重力使升降杆521做上升运动,从而使升降杆上的滚轮沿着滑动轨道进行滑动,当滑动至移动病床处时,转化器控制压缩弹簧为压缩状态,完成过床动作。滚轮的设置可以帮助活动床板更好的沿着轨道进行移动,压缩弹簧作为驱动件可以在脱离电控的基础上实现驱动的技术效果,而转化器的设置则帮助压缩弹簧511控制压缩状态,从而让患者控制弹簧是否需要工作,并完成过床动作。而第一轨道61与第二轨道62的设置则分别代表了不同的功能,独立使用第一轨道时,通过压缩弹簧的弹力,将活动床板向上提升,从而带动升降杆在第一轨道61内移动,由于升降杆与活动床板固定设置,而升降杆的顶端又设置有滚轮522,这样活动床板就会根据轨道的形状进行移动。
30.所述压缩弹簧511的数量为四个,分别设置于活动床板下的四个顶角,所述转化器523包括分别设置于压缩弹簧上的第一磁铁5111,设置于活动床板底部的第二磁铁5232以及磁性与第二磁铁5232相反的第三磁铁5234,所述第二磁铁5332以及第三磁铁5234设置于一个转盘上5235,所述第二磁铁5332与第一磁铁5231的磁性相同,所述转盘包括供患者操作的操作端,患者通过旋转转盘来控制第二磁铁或者第三磁铁露出并与第一磁铁作相应的吸引或排斥动作,所述使用病床上的第一磁铁与移动病床上的第一磁铁5231磁性相反,当需要过床时,患者控制旋转转盘,将第二磁铁5232露出并旋转至第一磁铁5231的正上方,磁铁相斥,弹簧弹开活动床板,使患者移动到移动床板上,而移动床板上的第一磁铁5231与使用病床上的第二磁铁5232磁性相反,呈相吸状态,完成过床动作。通过磁铁的磁性来控制弹簧的状态转化,当患者正常使用病床时,患者的重力加磁铁的吸力大于等于弹簧的弹力,当患者需要过床时,患者的重力小于磁铁的斥力加弹簧的弹力,从而可以克服轨道内的阻尼,床板可在活动轨道中移动。而患者只需旋转转盘,来让不同磁性的磁铁与弹簧上的磁铁进行配合产生相应的吸力与斥力。转盘的数量为四个,并且转盘之间通过齿条互相联动,通过旋转一个转盘就可达到同时对四个弹簧上的磁铁进行吸合或排斥。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1